機器人教育中的多元智能培養
2008-12-29 00:00:00周杰何少莎王小根
中國信息技術教育 2008年7期
目前,機器人教育越來越受關注,教育部于2003年在新頒布的高中技術課程標準中,分別把“人工智能初步”和“簡易機器人制作”設為信息技術和通用技術的一個選修模塊。如何有效開展機器人教育?筆者根據目前現狀和多元智能理論獲得了一些啟示。
■ 機器人教育的現狀
目前,各地中小學機器人教育正進入快速發展時期。但是,機器人教育在部分省市還難以開展,主要原因如下:
1.機器人教學資源的稀缺。由于中小學機器人教育是一門新興學科,且機器人的費用比較昂貴,市場上一個機器人大概需要6000元,如果兩人一組的話,一個班級僅材料費就要十幾萬,使得部分學校只能通過少數學生以興趣小組的方式開展局限教學,阻礙了機器人教育的開展與實施。同時,機器人教育在軟件方面投入也相當匱乏,市場上配套的機器人教育的教材很難適應實際教學的需要,使得機器人只是作為學校的一種擺設。
2.缺乏專業的機器人教師隊伍。負責機器人教育的教師往往是一些信息技術教師和物理教師,對于機器人的硬件方面知識還比較匱乏,使得在機器人硬件擴展平臺的搭建上缺乏深入研究,學校開展機器人教學只是局限于機器人的結構功能,而對機器人的編程控制等研究性學習缺乏經驗。
3.缺乏先進的教育理念。機器人教育尚處于探索階段,在機器人教育的實施過程中,缺乏對機器人教育的課程資源的開發。機器人教育由于沒有統一的一套標準體系以及缺乏先進的教育理念,所以在教學內容、教學模式以及
教學評價方面出現了一系列問題,這也是導致中小學機器人教育難以開展的原因之一。
■ 多元智能理論下機器人教育學習環境的建構
多元智能理論是由美國哈佛大學認知心理學專家加德納教授提出的,他認為人類具有八種智能,這些智能既相互
聯系又相互獨立。分別為語言智能、數理邏輯智能、視覺空間智能、身體運動智能、音樂節奏智能、人際交往智能、自我認識智能和自然智能。機器人作為一種自動化的機器,融合了與人或生物相似的智能能力、規劃能力、動作能力和協同能力。因此,開展機器人教育可以使學生融入到智能化的學習環境中,符合多元智能理論關于學習情境創設與多元發展的觀點,可以極大地發揮學生的個人潛能。
筆者針對機器人教育的現狀進行了反思,給出了以下啟示:機器人教育應該充分利用各種技術手段,促進學生多元智能的全面發展;要重視學習環境的設計,為學生提供多元發展的探究與創新平臺;要提供學生交流與協作的學習平臺,引導學生樹立正確的價值取向;要注重學生發展過程的評價,充分尊重學生個性的差異。
多元智能理論倡導的學習環境是一種促進學生語言智力、邏輯智力、交際智力及自我認知智力發展的學習環境。因此,在機器人教育推廣過程中,要改變其他學科過于強調接受學習、機械訓練的現狀,就必須突出學生的主體性,倡導學生動手參與、樂于探究的學習能力,具體為:
1.體現個性發展與共同發展相結合的原則。在機器人教育過程中,應該充分觀察學生的個性特征,根據學生自己的優勢,選擇機器人探究的某個模塊,進行探究學習,最后小組成員之間進行交流協作,共同完成學習任務。這樣,通過解決制作機器人過程中的實際問題,學生不僅可以深入了解物理方面的相關基礎知識,而且還能拓展學生在計算機方面的應用能力。例如,群體機器人是隨著多智能協調系統發展起來的,由于比單智能體具有更高的智能性,開發環節比較復雜,由此可以通過模塊化的分組方式首先提出組織策略、方法及其協調機制,然后各自完成開發任務,最后進行模塊之間的信息交換以及相互協調,從而創設良好的協作環境。
2.建立多維度評價機制,促進學生全面發展。加德納強調,人擁有多種認識世界的智能方式,每個人都有一個表現突出的智能。所以機器人教育評價要根據不同的智能類型來設計。一方面,應該正確對待學生的個體差異性,充分挖掘學習者的智力潛能;另一方面,需要摒棄傳統的單一的評價模式,建立多維度的評價機制,從而全面評價出學生的綜合素質。因此,機器人教育應該注重學生在學習過程中的自我反思以及關注學生的自我體驗。評價方式不一定采用常規的考試方式,可以從多維度進行教育評價。例如,可以從需求分析、設計方案、開發實現、成果回報等各個方面進行綜合性評價,這樣有利于突出學生的個性差異,促進學生全面發展。
■ 機器人課程資源模塊設置中的多元智能培養
AS—UII機器人作為面向教育的新一代智能移動機器人,其課程資源開發模塊由以下幾部分組成:
1.機器人概況。該模塊通常包括機器人的定義、歷史、原理等內容。為此,機器人概況的開設可以通過視頻、討論等方式開展機器人學習研究,充分發揮學生的語言智能、視覺空間智能、音樂節奏智能等。
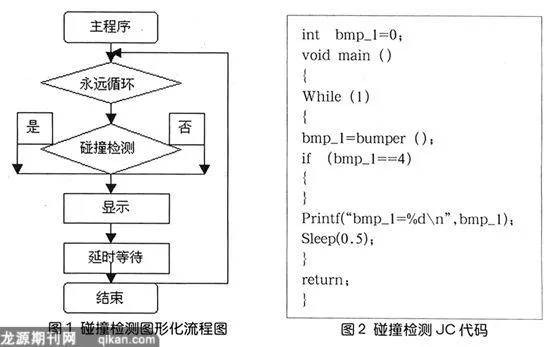
2.機器人編程。利用VJC的圖形界面化編程方式,用模塊搭建流程圖的形式進行編程,可以幫助學生對程序語言有一個感性的認識,擴充學生的數理邏輯智能和自然智能等。同時,學生在初步掌握VJC后,還可以通過JC語言進行代碼編程。在實際應用中,更應利用兩種編程界面的切換來進行學習,從而真正提高學生對于程序語言知識的理解,發展學生的視覺空間智能以及數理邏輯智能。圖1和圖2分別表示了判斷碰撞檢測并顯示碰撞發生的圖形化編程方式與JC開發方式。
3.機器人硬件。該模塊包括傳感器、微處理器、驅動器等硬件知識。講解時,可以通過開發一些機器人感知外界環境信息的程序,使學生更好地理解傳感器等方面的知識,培養學生的身體運動智能、數理邏輯智能等。例如,在無錫中小學開展的奧運火炬接力賽的活動,使得學生對灰度傳感器等方面有了更深刻的認識,激發了學生的創作興趣。
4.機器人應用。可以通過AS—UII能力風暴的ASBUS的擴展總線,根據學生自己的想法和設計,添加一些紅外接收傳感器等其他硬件結構,充分發揮學生的想象空間,提升學生多元智能的開發。比如可以利用紅外線傳感器檢測障礙,當有障礙時,及時做出避障動作。這樣不僅避免了相關理論知識的枯燥無味,而且促進了學生學習的意識。另外,還可以開展一些單片機的教學,作為輔助機器人教育的教學方式,從而使機器人教育更加深入。例如,無錫社橋中學的單片機及嵌入式系統機器人教學,通過學生自己動手,提高了學生的動手能力和創新能力。目前該模式正在江蘇全省進行推廣,教材也被江蘇省和新疆自治區中小學單片機(機器人)培訓班采用。