基于協(xié)作學習理論的中小學機器人教學設計研究
2009-04-02 10:05:52桑麗華張運凱王靈曉
中國教育技術裝備 2009年6期
關鍵詞:教學設計
桑麗華 張運凱 王靈曉
摘要 協(xié)作學習對培養(yǎng)學生的協(xié)作共事能力、創(chuàng)新能力和改變學生的思維方式有重要的作用。與傳統(tǒng)學習方式相比,協(xié)作學習更能提高課堂學習氛圍、學習興趣和效率。將協(xié)作學習應用到中小學機器人教學中,對基于協(xié)作學習的中小學機器人教學設計進行研究。
關鍵詞 協(xié)作學習;中小學機器人;教學設計
中圖分類號:G424.23 文獻標識碼:A 文章編號:1671-489X(2009)06-0030-02
Study on Primary and Secondary Schools Teaching Robot Design based on Theory of Collaborative Learning//Sang Lihua, Zhang Yunkai, Wang Lingxiao
Abstract Cooperative learning on cultivating students' ability of coordination, innovation ability and the work of the students' way of thinking has changed. Compared with the traditional learning mode, cooperative learning can improve classroom learning atmosphere more, students' interest and efficiency. Cooperative learning is used in elementary education, based on robot of cooperative learning in primary design teaching robot was studied.
Key words collaborative learning;primary and secondary robot;instructional design
Authors address
1,2 Hebei Normal University, Shijiazhuang 050016
3 Hebei University, Baoding, Hebei 071002
機器人教育是全面培養(yǎng)學生信息素質、提高創(chuàng)新精神和綜合實踐能力的良好載體。隨著智能機器人技術的迅猛發(fā)展和機器人競賽在中小學的逐漸升溫,將智能機器人的基礎知識和技能納入中、小學的信息技術課程的必要性和可行性已經(jīng)非常明朗和成熟[1]。在中小學開展機器人教育,有助于學生的邏輯思維能力、實際動手能力和創(chuàng)新精神的培養(yǎng)。中小學生初步接觸機器人知識既感到新奇又沒有一定的知識基礎,需要教師的指導及學生之間的相互協(xié)作。所以從協(xié)作性學習方面著手,筆者對中小學機器人教學設計進行了研究。
1 協(xié)作學習理論
協(xié)作學習也稱合作性學習、合作教學等,是一種基于學習協(xié)作體組織形式的群體學習方式。在這種學習方式下,通過一定的激勵機制,使得不同的學習者都對協(xié)作體負責,共同完成學習任務,同時學習個體也從協(xié)作體中獲益[2]。
目前國家還未制定中小學機器人課程標準,這種情況下在中小學教師要靈活開展機器人課程,充分發(fā)揮機器人教育在培養(yǎng)中小學生各種能力中的作用。首先,要激發(fā)學生的學習興趣和動機。學習興趣是學生持續(xù)學習的重要因素,機器人教育不管是在教學過程還是在課外活動中都能以小組比賽形式,使學生獲得成功的快樂,從而激發(fā)學習動力。其次,響應中小學新課程教學中倡導的學習方式,促進教學方式的改革。在機器人教育中,課堂以學生為中心,教師提供學習主題和主題支架。最后,通過機器人競賽等形式可以培養(yǎng)小組成員之間的相互協(xié)作能力。在競賽等活動進行過程中需要小組成員之間相互配合和學生之間相互交流,在實踐中提高團隊協(xié)作能力。
2 協(xié)作學習理論指導下的中小學機器人教學設計
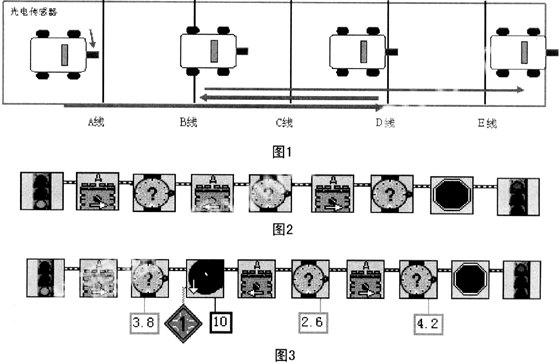
案例為石家莊四十三中機器人教學中的一個例題,如題:“請給你的機器車編寫程序,使機器車能準確地完成以下任務:讓機器車從A線出發(fā)(出發(fā)時車體的任何部位不能超越起跑線A),當車體的任意部分超越D時,立即倒退至B線(車體的后輪壓過B線即可)后,在迅速前進至終點線F停車(停車時車體的任意部分都必須越過終點線F)。如圖1所示。”
此題目有4種常見解決方案。方案一,時間變量控制(圖2);方案二,時間和光感聯(lián)合控制①(圖3);方案三,時間和光感聯(lián)合控制②(圖4);方案四:光電傳感器精確控制(圖5)。
題目要求各小組通過共同協(xié)作完成任務,在下次機器人課堂上教師組織小組間進行協(xié)作學習。
1)學習任務設計。設計學習任務時,應充分考慮:學習任務要符合學習者的特征,不能超越學習者知識能力太多;學習任務應具有開放性,解決問題的目的不是期望學生給出完美的答案,而是鼓勵學生參與;學習任務應具有足夠的復雜性,能夠引發(fā)學習者的高級思維活動;學習任務的完成依賴于學習伙伴之間的合作[3]。
本文以一堂展示各小組完成任務和小組間的協(xié)作學習為研究對象,作業(yè)任務明確,具有一定的復雜性和可分解性,題目的復雜性容易激發(fā)學生的挑戰(zhàn)欲望,并且能凝聚小組成員之間的團結力量。
2)分組設計。在進行分組時,依據(jù)CSCL分組系統(tǒng)模型的設計思想進行了分組,分組的基本原則是異質同組,分組的基本算法是盡可能地將差異度最大的學生分在每個小組中,并且使得小組間的差異度減小到最低程度[4]。這樣既使小組間沒有太大的差異又保證了小組成員之間的和諧。指導教師進行指導,保障小組成員之間能夠在相互信任依賴的情況下工作。
3)學習資源設計。學習資源設計目的在于提供與任務相關的信息資料,供學生查詢、學習,為學生進一步思考提供支架,引導學生完成任務。
教師將每節(jié)課的課件放在機器人教室的電腦上以供學生參考。指導教師每周有兩天在指定時間給學生進行指導,針對學生提出的問題進行講解,將所需資料提供給學生,指導小組討論、協(xié)作研究并將各自的學習結果利用適當?shù)姆绞竭M行表達,學生也可以自己搜集資料并分享給其他學生。
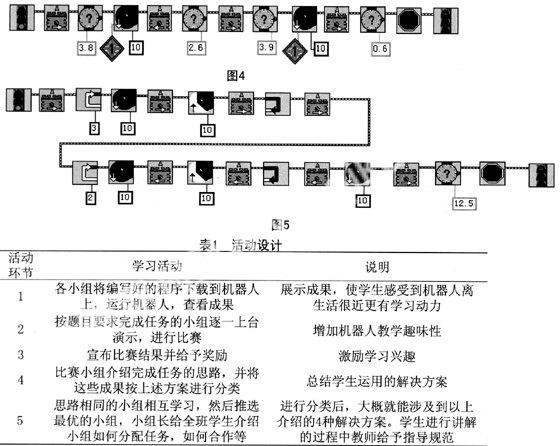
4)學習活動設計。本文的主要活動是學生展示和交流學習成果,活動設計如表1所示。
5)協(xié)作學習評價。最后評價分為2部分:一是對學習小組的評價,二是對學生個人的評價。
小組評價:小組自評,小組間互評和教師評價三種評價方式。小組評價從以下幾個方面考慮:小組協(xié)作程度、任務過程中參考資料、任務結果。小組最后得分是3種評價方式的平均分。
學生個人評價:針對學生在協(xié)作過程中的表現(xiàn)進行評價,學生個人的評價成績由小組成員和指導教師共同決定,評價主要是從協(xié)作過程中的態(tài)度、分配任務完成程度等方面考慮。
3 結論
在協(xié)作學習過程中學生主動學習大家提供的資源,學生自主篩選有用信息,不僅擴大了知識范圍也提高了自主學習能力,同時協(xié)作學習對培養(yǎng)學生自主創(chuàng)新能力和團結協(xié)作能力有很大促進作用,也改變了傳統(tǒng)的教學方式。但目前對它的研究還比較少,需要更多人繼續(xù)研究。
參考文獻
[1]李存剛.中小學機器人競賽和機器人教育價值[J].中國信息技術教育,2008(06)
[2]馬穎蜂.網(wǎng)絡環(huán)境下的教與學——網(wǎng)絡教學模式[M].北京:科學出版社,2005
[3]劉萍.網(wǎng)絡環(huán)境下協(xié)作學習的教學設計與案例研究[J].陜西師范大學繼續(xù)教育學報,2005
[4]李潔,王咸偉,李克東.協(xié)作學習中協(xié)作小組分組系統(tǒng)的設計與開發(fā)研究[J].華南師范大學:自然科學版,2007
猜你喜歡
課程教育研究·學法教法研究(2016年21期)2016-10-20 19:29:34
課程教育研究·學法教法研究(2016年21期)2016-10-20 19:26:00
課程教育研究·學法教法研究(2016年21期)2016-10-20 19:22:25
中學課程輔導·教師教育(中)(2016年9期)2016-10-20 16:20:37
中學課程輔導·教師教育(中)(2016年9期)2016-10-20 16:19:55
中國科技博覽(2016年19期)2016-10-19 14:17:07
考試周刊(2016年79期)2016-10-13 23:26:02
考試周刊(2016年79期)2016-10-13 22:17:05
考試周刊(2016年77期)2016-10-09 11:49:00
考試周刊(2016年76期)2016-10-09 09:18:59