模糊控制理論的探索與研究
2009-04-02 10:05:52陳愛敏
中國教育技術裝備 2009年6期
陳愛敏
模糊控制模仿人的決策能力和推理功能,是又一類智能控制的形式。本文研究模糊控制理論及其實現。模糊控制的基本思想就是利用計算機來實現人的控制經驗,而人的控制經驗一般是由語言來表達的,這些語言表達的控制規則又帶有相當的模糊性。因此要了解被控對象數學模型的結構、階次、參數等,然后在此基礎上合理選擇控制策略。
模糊邏輯控制(Fuzzy Logical Control)簡稱模糊控制(Fuzzy Control),是以模糊集合論、模糊語言變量和模糊邏輯推理為基礎的一種計算機數字控制技術。在傳統的控制領域里,控制系統動態模式的精確與否是影響控制優劣的關鍵所在,系統動態的信息越詳細,則越能達到精確控制的目的。然而,對于復雜的系統,由于變量太多,往往難以正確描述系統的動態,于是工程師便利用各種方法來簡化系統動態,以達成控制的目的,但卻不理想。換言之,傳統的控制理論對于明確系統有強而有力的控制能力,但對于過于復雜或難以精確描述的系統,則顯得無能為力。因此嘗試以模糊數學來處理這些控制問題。
如人工控制反應釜的釜內溫度經驗可以表達為:若釜內溫度過高,則開大冷水閥;若溫度和要求的溫度相差不太大,則把水閥關小;若溫度快接近要求的溫度,則把閥門關得很小。這些經驗規則中,“較小”“不太大”“接近”“開大”“關小”“關得很小”等表示溫度狀態和控制閥門動作的概念都帶有模糊性。這些規則的形式正是模糊條件語句的形式,可以用模糊數學的方法來描述過程變量和控制作用的這些模糊概念及它們之間的關系,又可以根據這種模糊關系及某時刻過程變量的檢測值(需化成模糊語言值)用模糊邏輯推理的方法得出此刻的控制量。這正是模糊控制的基本思路。
模糊控制理論發展至今,模糊邏輯推理的方法大致可分為3種,第一種依據模糊關系的合成法則;第二種依據模糊邏輯的推論法簡化而成;第三種和第一種相類似,只是其后件部分改由一般的線性式組成。
由于模糊控制器的模型不是由數學公式表達的數學模型,而是由一組模糊條件語句構成的語言形式,因此從這個角度上講,模糊控制器又稱模糊語言控制器。模糊控制器的模型是由帶有模糊性的有關控制人員和專家的控制經驗與知識組成的知識模型,是基于知識的控制,因此,模糊控制屬于智能控制的范疇。
可以說,模糊控制是以人的控制經驗作為控制的知識模型,以模糊集合、模糊語言變量以及模糊邏輯推理作為控制算法的數學工具,用計算機來實現的一種智能控制。
1 模糊控制系統的組成
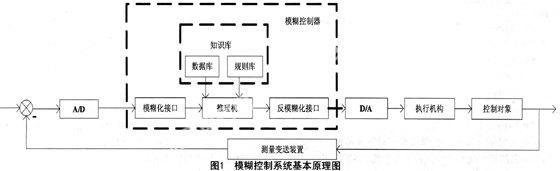
模糊控制系統的基本原理圖如圖1所示。其中的核心部分為模糊控制器,由于模糊控制器的控制規則是根據操作人員的控制經驗取得的,所以它的作用就是模仿人工控制。模糊控制器的控制規律由計算機的程序實現。其功能的實現是要先把計算機觀測控制過程得到的精確量轉化為模糊輸入信息,按照總結人的控制經驗及策略取得的語言控制規則進行模糊推理和模糊決策,再經去模糊化處理得到輸出控制的精確量,求得輸出控制量的模糊集作用于被控對象。因此,控制器的結構通常是由它的輸入和輸出變量的模糊化、模糊推理算法、模糊合成和模糊判決等部分組成。
2 模糊控制器的設計原理
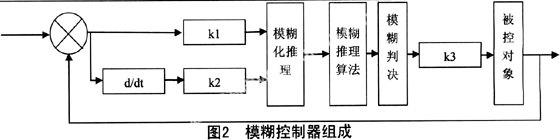
模糊控制器結構如圖2所示。模糊控制器主要由模糊化、模糊推理和模糊決策(反模糊化)3部分組成。模糊控制器的輸入是實際量,經模糊化后轉換成模糊輸入。根據輸入條件滿足的程度和控制規則進行模糊推理得到模糊輸出。該模糊輸出經過模糊判決(反模糊化)轉化成非模糊量用于過程的控制。
模糊控制器3部分的共同基礎是知識庫,它包含模糊化所用的隸屬函數、模糊推理的控制規則及反模糊化所用的公式。和常規控制方法比較,模糊控制有其明顯的優越性。由于模糊控制實質上是用計算機去執行操作人員的控制策略,因而可以避開復雜的數學模型。對于非線性、時變的大滯后及帶有隨機干擾的系統,由于數學模 型難以建立,因而常規控制方法也就失效;而對這樣的系統,設計一個模糊控制器卻沒有多大困難。
3 小結
模糊控制的精度受到量化等級的制約。另外,對于普通的模糊控制而言,它類似于比例微分的控制方式,還有一個非零的穩態誤差,屬于有差調節。如果將PID控制技術和它結合起來,取長補短,發揮兩者的優勢,就能取得更好的控制效果。
猜你喜歡
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
黨課參考(2021年20期)2021-11-04 09:39:46
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
文苑(2020年4期)2020-05-30 12:35:30
小哥白尼(軍事科學)(2019年6期)2019-03-14 05:49:56
黨課參考(2018年20期)2018-11-09 08:52:36
小學生作文(中高年級適用)(2018年3期)2018-04-18 01:24:47
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
華北電力大學學報(社會科學版)(2016年4期)2016-12-01 03:59:30