航天器編隊飛行和空間演示驗證技術——有人照料空間實驗室與平動-轉動物理仿真器
2010-01-08 08:32:12林來興
航天器工程 2010年3期
林來興
(北京控制工程研究所,北京 100190)
1 引言
航天器編隊飛行是空間技術在應用領域的一個創新。通過編隊飛行可以獲得過去單顆航天器無法獲得的結果。航天器編隊飛行是近年來國內外研究的熱點,開發出了大量算法和各種星上軟件。用什么方式才能獲得有效驗證,說明這些軟件是正確的,可以安全應用。這里介紹兩種空間飛行演示驗證方式:有人照料空間實驗室與平動-轉動物理仿真器。美國麻省理工學院空間系統實驗室經過5~6年研究,論證與制定實施計劃,到最后在“國際空間站”以及麻省理工學院物理仿真實驗室得到實現,證明這兩種方式驗證非常有效,對航天器編隊飛行算法軟件驗證,獲得了創里程碑的成果[1]。
2 航天器編隊飛行特點
航天器編隊飛行研究詳見文獻[2-4]。這里僅作和本文有關如下補充:
1)編隊飛行優點
航天器編隊飛行引起世人極大關注是在20 世紀90年代末期。為什么會引起如此的關注呢? 其原因在于編隊飛行具有一系列優點:
(1)編隊飛行可構成空間應用的一種新概念,例如,虛擬衛星;
(2)可提供極大測量基線,從而促進下列領域的發展,例如,星載干涉儀、全球遙感、同步目標跟蹤觀測等,預計今后10~15年間空間遙感測量精度將提高1~2 個數量級[5];
(3)可由輕巧靈活的小衛星代替龐大復雜的大衛星;
(4)編隊飛行航天器可以隨時加入和退出(故障),系統具有很高的重構性、冗余性、安全可靠性;
(5)編隊飛行一般都要協調聯合控制,星間交換信息量很大,而且測量與控制要求精度很高,為此需要高度自主性,從而也降低對地面站的依賴。
具有任務背景的航天器編隊飛行應用項目越來越多,同時也證明上述編隊飛行優勢越來越大。為此可以預測隨著時間的推移,這個優勢還會增加。
2)編隊飛行的技術難點
航天器編隊飛行雖然具有很多優點,但是在技術方面,它也存在技術難點,主要表現在下列四個方面:
(1)編隊飛行軌道構型和燃耗
設計一個能滿足空間飛行任務的編隊飛行軌道構型,要求在建立軌道初始條件和長期運行中保持隊形不變所需要燃料是最經濟的;同時能在工程上實現,特別是在地球近地軌道。
(2)編隊飛行制導、導航與控制(GNC)
編隊飛行要求多顆航天器同時統一協調地對軌道位置和姿態指向的多變量,進行高精度的自主測量和精密的控制,且又要求消耗燃料最省。
(3)編隊飛行星間通信
整個編隊飛行的運行操作全依靠星間通信實現。目前主要采用的是激光通信技術。星間通信有如下技術要求,信息量大、頻帶寬、運行時安全可靠、性能穩定、連續性好、抗干擾強、星上設備重量輕、功耗低等。這對通信技術將是一個挑戰。
(4)編隊飛行高逼真度物理仿真技術和空間演示驗證方法
為了確保編隊飛行復雜研制工作能順利進行以及完成在軌編隊飛行任務,需要在地面上建立一個能夠滿足多顆航天器的高逼真度多自由度動力學仿真器,以及尋找一種既有效又經濟的空間演示驗證方法。目前一般的動力學仿真器不能滿足編隊飛行的要求。
本文下面的內容主要是研究如何解決這個難題。
3 編隊飛行空間演示驗證方法
航天器編隊飛行是近十年來發展的一種星群,飛行任務要求多顆航天器同時在軌道上嚴格統一協調地工作,保持精確編隊飛行的隊形(各星相對位置)和需要的姿態。
當前編隊飛行的航天器技術基本由兩大部分組成:一部分為軟件,另一部分為硬件。星上軟件的比重和重要性越來越大。這是因為編隊飛行的航天器硬件在相當程度上可以維持已有單顆航天器的技術,當然也有新的要求和出現一些新的元部件。但是軟件則完全不一樣,基本上是剛出現的,而且大部分是創新的。為此,新開發研究出來的算法軟件都必須通過嚴格演示驗證,并且須得到滿意的結果才能開始應用。目前飛行演示驗證的最直接方式就是發射試驗衛星,但這種方式代價太大,風險很高,需要時間較長,因為剛開發出的軟件很容易發生錯誤(這在研究初期是難免的),一旦錯誤發生將有災難性的后果,試驗衛星會以失敗告終。那么用什么方式是最適合編隊飛行軟件空間演示驗證呢?
目前能夠實現的軟件驗證方式,除了發射真正試驗衛星以外,有以下三種:
1)平動-轉動物理仿真器。應用氣浮臺(單軸或三軸)加上兩軸可以平面運動的氣墊。共同構成一個3~5 自由度失重仿真器。這種多自由度仿真器的動力學真實性有一定局限性,因為仿真自由度不夠,但是仿真實驗時間比較長,經濟成本比較低,使用方便。
2)飛機拋物線飛行。可實現短時間的失重狀態,仿真動力學真實性比較好,但是一次拋物線飛行僅能提供25s 的失重狀態,若進行多次拋物線飛行,則飛行演示驗證實驗僅能斷斷續續地進行,這對很多算法軟件驗證難以滿足要求。這種方式經濟成本居中。
3)有人照料航天器。也就是由載人飛船或者空間站提供一個失重艙位,就可以完全實現6 自由度動力學真實空間環境。一次實驗時間可以達到1~2h,由于宇航員參加工作,當推進劑和電池用完,宇航員可以方便快捷地更換。為此空間飛行實驗可以持續必需的時間。當實驗過程發生軟件錯誤或故障時,宇航員可以立刻中止實驗,然后等待更換修正好的新軟件,飛行實驗又可繼續進行,只是耽誤一些時間,不會有什么損失。但是經濟成本比較高。
以上三種失重方式各有優點,經濟成本也有很大差別。為此在開發研究編隊飛行算法軟件在不同階段可分別予以采用。例如開發研究初期,往往先采用平動轉動組合多自由度物理仿真器,因為這種仿真器使用方便,也能滿足初期開發算法軟件驗證的要求。一般到最后階段,開發算法軟件都比較成熟的時候,才采用有人照料航天器。對編隊飛行軟件演示驗證來說,第一種和第三種方式最合適,下面將分別討論這兩種演示驗證方式和應用實例。
4 平動轉動物理仿真器
平動-轉動物理仿真器通常將三軸轉動氣浮臺安裝在兩軸平動氣墊上。為了使仿真器平動時摩擦阻力降低到最低程度,以便構成一個微重力空間環境,安置仿真器的地板有特殊要求:1)光滑無摩擦阻力;2)極高的水平度。光滑無阻力的地板一般有兩種形式:第一種是由特制環氧樹脂澆注在地面上。也就是說,事先把環氧樹脂加熱,直到它成為液體狀態,然后快速澆注在地面上,依靠液體流動形成自然平面。當溫度降低凝固成固體,就是所要求的光滑無阻力的地板。水平度一般要求優于0.1‰~0.05‰,這意味著長度為10m 時水平度誤差不允許超過0.5~1mm。環氧樹脂的地板面積,根據實驗任務的要求和環氧樹脂澆注的技術局限,一般可以做到幾百~上千平方米。另一種地板是由高光潔度大理石拼成一個所需要面積,并且用氣墊支撐,隔離與減少外部振動影響。由于每塊大理石面積有限,需要拼接多塊大理石,加上接縫在內,整塊面積水平度要達到要求。這種大理石拼成的地板一般在幾百平方米左右。
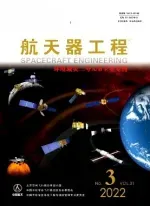
由于編隊飛行的航天器數量起碼在2~3 顆以上,提供仿真器運動面積有限。為此要求仿真器體積要小,重量要輕(包括承載編隊飛行航天器),編隊航天器要專門制成實驗衛星(將在下面討論)。三軸轉動氣浮臺水平兩軸轉動可達到±30°(滾動角和俯仰角),垂直轉動角(偏航角)±180°。三軸轉動氣浮臺安裝有自動平衡調節機構,以保證在任何轉動角條件下,氣浮臺保持穩定,不會翻轉。目前技術條件下自動調節平衡機構可使不平衡力矩達到10-5N·m。圖1 所示為麻省理工學院空間系統實驗室5 自由度平動轉角仿真器。圖上部為三軸轉動氣浮臺,下部為兩軸平動氣墊。圖中標有仿真器大小尺寸和供給推力器的氣瓶(在轉動氣浮臺上)。最下面氣瓶是供給平動推力器使用。整個仿真器直徑大約在1.5m,高度1.65m。這里不包括外部設備(例如模擬器,測量標定設備等)[6]。
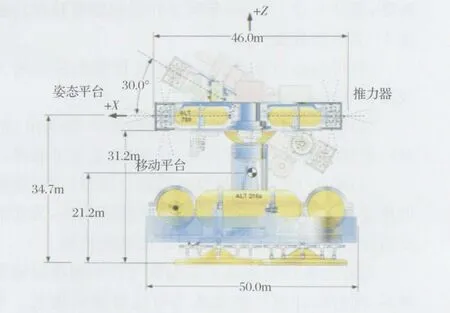
圖1 麻省理工學院空間系統實驗室平動轉動物理仿真器Fig.1 MIT SSL translational rotational physics simulator
圖2 表示10 自由度交會對接物理仿真器。它由兩個上述5 自由度平動轉動仿真器組成,一個為追蹤器,另一個為目標器。
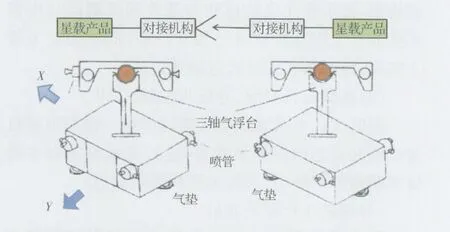
圖2 10 自由度RVD 全物理仿真器Fig.2 10-DOF RVD full-physics simulator
在進行交會對接物理仿真實驗過程中應設有防撞機構,也就是相對導航系統,測出兩星在某一規定距離內相對速度超過一定局限,立刻啟動推力器,把兩星向后推開,實驗重新開始。
圖3 表示美國航空航天局(NASA)戈達德航天飛行中心(GSFC)為NASA 的地外行星探測器-1(TPF-1)任務所研制編隊飛行軟件,在平動轉動仿真器進行演示驗證實驗[7]。TPF-1 由5 顆紅外干涉航天器(納星型式)組成編隊飛行,目的是尋找地外行星。仿真實驗要求編隊飛行軌道位置控制精度±5cm,方位精度±5″,姿態控制精度15″。該任務2000年開始研究設計,現在正處于研制階段,計劃于2017年發射。
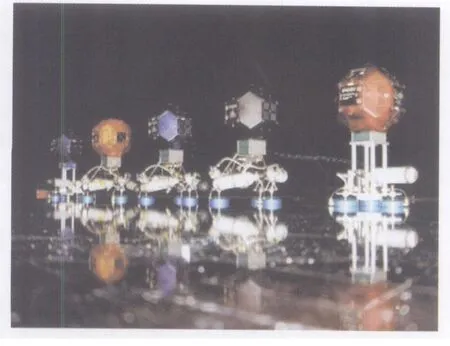
圖3 美國戈達德航天飛行中心TPF-1 航天器(編隊飛行物理仿真實景圖)Fig.3 USA Goddard Space Flight Center TPF-1 spacecraft formation flight physical simulation
從圖3 中可看到五顆納星在物理仿真器上,由于地板鋪上玻璃,所以可看到倒景。
5 有人照料空間實驗室
有人照料空間實驗室還包括載人飛船和空間站。由它們提供一個空間艙位,最好是靠近或者處在航天器質量中心,因為在那里微重力最小。艙位空間要求為每邊長至少1.5~2m 的立方體,或者直徑2m 的球體,空間體積越大越好。同時要求編隊飛行的航天器制成簡易實驗納星,把與航天器編隊飛行軟件演示驗證有關的部件,按納星型式組裝。對簡易實驗納星具體要求如下:
1)按納星型式研制,重量為10kg 量級;
2)體積為多面體球形,直徑約為0.2~0.3m;
3)實驗納星僅為平臺,沒有有效載荷。驗證實驗時,若需要有關部件可以暫時安裝在納星某一個表面上,實驗完即刻拆下;
4)實驗納星導航系統最好是采用自主式,在外界沒有模擬器。例如微型速率陀螺,微型加速計等;
5)驗證實驗時,有人照料主要是指監視觀察編隊飛行工作狀態,及時更換用完的電池和補充推進劑,在發生故障時,及時中止實驗并處理故障。
根據上述對實驗納星的要求,這里介紹美國麻省理工學院空間系統實驗室研制的納星,稱為同步位置保持接觸重新定向實驗衛星(Synchronized Position Hold Engage Reorient Experimental Satellites),它體現上述全部要求,技術性能如下:
重量(包括推進劑和電池):4.3kg
其中凈重:3.5kg
最大推力器推力:0.12N
最大線加速度:0.17m/s2
最大力矩:0.023N·m
最大角加速度:3.5rad/s2
電源(由16AA 電池提供):13W
電池工作壽命:2h
星與星之間以及與地面站通信都采用無線電通信。
星上處理器:型號為TIDSP, 計算速度浮點1Gbit/s,并且有256kbyte 閃存。
SPHERES 納星GNC 系統由三軸飛輪姿態穩定系統和冷氣(CO2)推進軌道控制系統組成。
實驗納星外形結構像一個籃球,如圖4 所示,外殼進行完整包裝,結構堅硬,假使有輕微相碰也不會損壞。
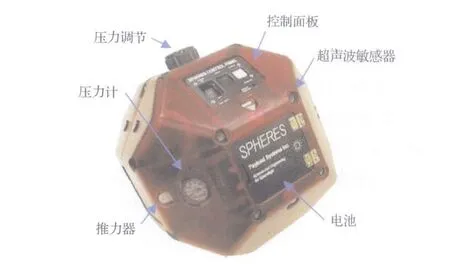
圖4 SPHERES 納星外形結構Fig.4 SPH ERES nanosat structure
平動-轉動物理仿真器和有人照料空間實驗室在進行飛行驗證時,都需要一套實驗納星相對導航系統,實時測量編隊飛行各星相對位置和相對姿態。麻省理工學院研究了一套超聲波敏感器測量系統。此系統由安裝在框架上已知固定位置的5 個超聲波信標和每顆納星裝有的24 個超聲波接收器組成。
16 面體納星表面,其中有6 個面,每個表面裝有4 個超聲波接收器,共24 個。在最理想狀態下超聲波敏感器測量系統可測到120 個相對距離(5×24=120),每個相對距離是由超聲波傳輸時間差乘以聲波速度所得。為了精確計算聲波傳輸時間差,采用紅外閃光器統一測量時標。圖5 表示超聲波敏感器系統原理圖[8]。
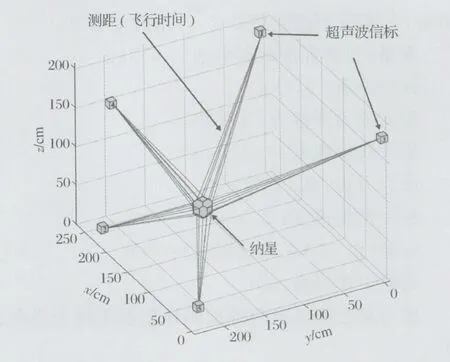
圖5 超聲波敏感器測量系統Fig.5 Ult rasound beacons sensor measurement system
由于一次至少有幾十個可測相對距離,通過擴展卡濾波器,可以得出納星編隊飛行各星相對框架坐標系的距離、速度、姿態角與姿態角速度。在三顆納星中選定一顆作基準星,而基準星的位置由GPS系統定時測量與標定。在此基礎上把各納星對應的框架坐標轉化成為各納星相對距離、相對速度、相對姿態角與角速度,從而作為導航信息進行編隊飛行有關的制導與控制。上述測量系統提供位置精度±5mm ,姿態角精度±1°。納星三軸姿態穩定系統由三軸正交安裝三個測速陀螺與三個反作用輪組成[9]。飛輪最大轉速3 529r/min。飛輪轉動慣性為7.426×10-6kg·m2,當飛輪發生飽和時,可由噴氣卸載,但是在空間飛行實驗每次只能連續1~2h,所以發生飛輪飽和機會很少。冷氣推力器采用加壓CO2推進劑,比沖36s,推進系統有16個噴嘴和4個CO2壓力容器,每個容器可裝CO2推進劑170g。
6 SPHERES 納星編隊飛行演示驗證內容與結果
SPHE RES 納星在“國際空間站”進行飛行驗證從2006年起到2008年底,美國麻省理工學院空間系統實驗室花費前后兩年多時間,總共進行14 個項目(Test Session),每個項目又有若干實驗。這些實驗項目包括兩個部分內容:空間交會對接與航天器編隊飛行的算法軟件。這是在空間真實環境下進行飛行演示驗證實驗時間之久,實驗項目之多,在航天歷史上可以說從來沒有過。所取得結果也是創里程碑的。
圖6 表示SPHERES 納星在“國際空間站”進行飛行演示驗證的實況,圖中紅藍黃三色表示三顆納星的飛行狀態, 旁邊有宇航員在觀察監督。有關SPHERE 納星編隊飛行在“國際空間站”進行空間演示驗證項目的內容與時間見表1。

圖6 SPHERES 納星在“國際空間站”上進行飛行演示驗證的實況Fig.6 SPHERES nanosat operation aboard the ISS
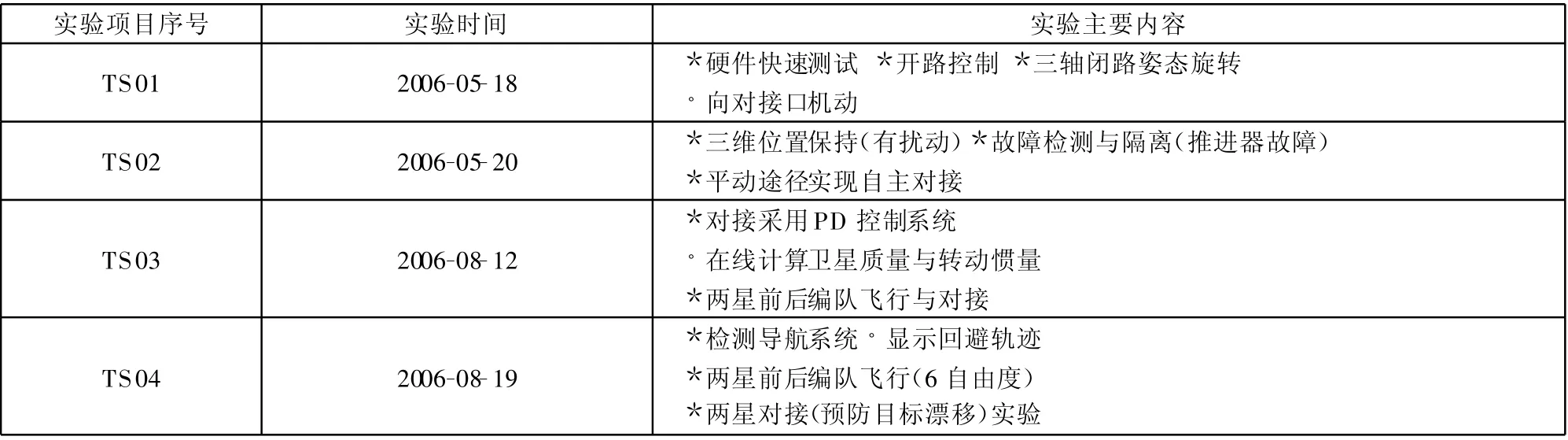
表1 SPHERES納星在“國際空間站”上進行算法軟件飛行演示驗證項目的內容與時間[10-12]Table 1 SPHERES nanosat aboard the ISS flight demonstration program
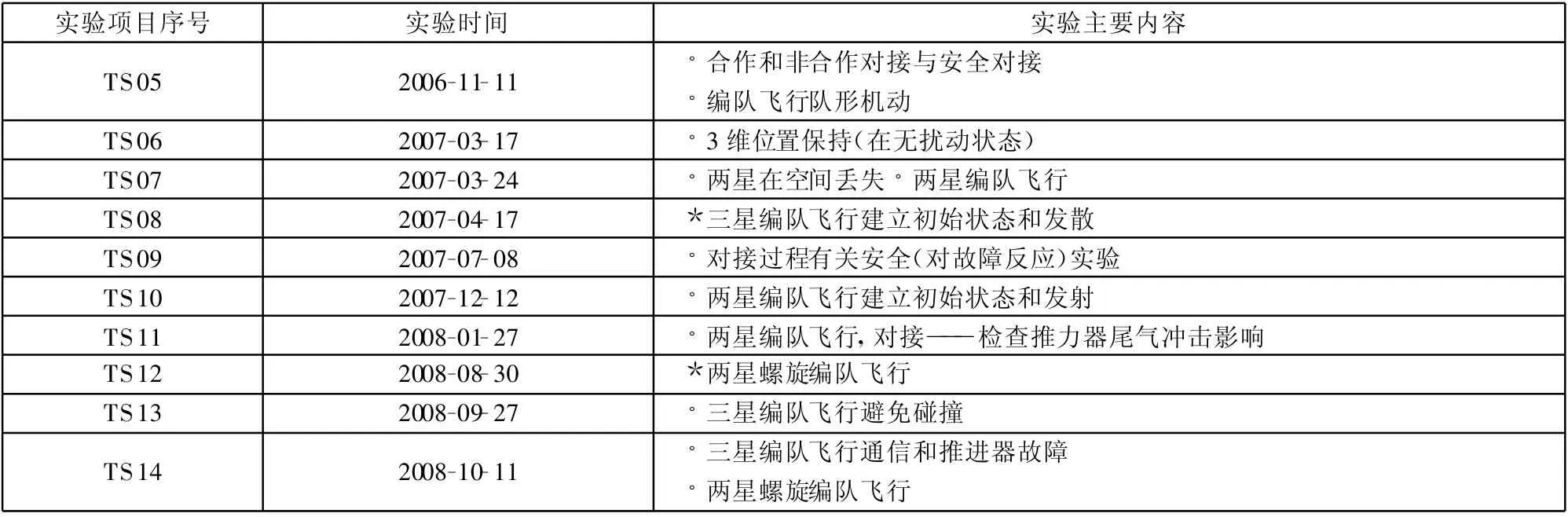
續表1
下面介紹表1 中標有*號的演示驗證實驗結果:
1)TS01 實驗
·快速硬件檢測(成功)
·開路姿態旋轉(成功)
·三軸閉路姿態旋轉(失敗)
·超聲波敏感器信標數據收集(失敗)
·測量信標閉路控制(失敗)
2)TS02 實驗
· 三維位置保持(有擾動)(成功)
·故障檢測與隔離(成功)
·自動對接(部分成功)
3)TS03 實驗
·6 自由度單信標測量(部分成功)
·機動對接(成功)
·兩星編隊飛行(成功)
·兩星對接(失敗)
4)TS04 實驗
·GPS 系統位置測量硬件檢測(成功)
·單星閉環位置控制(失敗)
(有GPS 系統位置測量)
· 兩星前后編隊飛行(成功)
·兩星對接(失敗)
5)TS08 實驗
·圓形編隊飛行,采用PID 控制系統(成功)
·三星編隊飛行隊形位置保持精度±2cm(成功)
·圓形編隊飛行在空間站實測的飛行軌跡如圖7 所示
6)TS12 實驗
·兩星螺旋(Spiral)編隊飛行采用開關式LQR燃耗最優控制(部分成功);
·衛星完成軌跡機動,但是沒有達到5cm 位置精度,分析原因是開關線性二次調節器(LQ R)控制的問題;
·兩星螺旋編隊飛行在“國際空間站”內實測飛行軌跡,見圖8 所示。左右兩圖表示兩次實驗。
以上實驗有三種結論:1)成功;2)部分成功;3)失敗。若是部分成功或失敗,則僅說明此次實驗的結果,并非是最終結果,因為同一種驗證要進行多次實驗。只有完全成功,則該項目才能獲得通過。若演示驗證結果是成功的,則表示該項目所用算法、軟件編制、各種制導與控制規則等都是正確的,并且符合空間飛行任務的要求。
7 結論與建議
有人照料空間實驗室和平動-轉動物理仿真器是航天器編隊飛行軟件空間演示驗證的有效方法。實驗環境非常真實,實驗納星輕便簡單,實驗時間可以很長,實驗結果非常有效。這種飛行演示驗證方 法值得參考借鑒。為此建議:
1)對航天器編隊飛行研究,從飛行任務立項開始時,就應考慮如何進行空間演示驗證,因為當前編隊飛行從系統到軟件和部分硬件都是新的技術,沒有前人經驗可借鑒。
2)要集中建設大面積平動-轉動物理仿真器和相應高逼真度、高水平的仿真實驗室,提供多方使用。避免低水平重復簡陋分散的建設。
3)載人飛船工程實施以后,我國計劃發射空間站,或者有人照料空間實驗室。航天器編隊飛行空間演示驗證應列入其應用研究項目。
)
[1]Saenz Otero A, Katy J, Miller C,et al.SPH ERES demonstrations of satellite formation aboard the ISS[R].AAS09-011, 2009
[2]林來興.分布式空間系統和航天器編隊飛行辨析[J].航天器工程,2008,17(4)
[3]林來興.分布式小衛星系統的技術發展與應用前景[J].航天器工程,2010,19(1)
[4]Pini Gurfil, et al, Spacecraft formation flying [M].ELSEVIER, 2010:1-10
[5]Leiner J.S pacecraft formation f lying -an overview of mission and technologies[R].AAS07-031 , 2007
[6]Garet t A Sohl , et al .Distributed Simulation for Formation Flying Applications[R].AIAA-P-05-2226, 2005
[7]Saenz Otero A, Miller D W.Design and operation of micro-gravity dynamics and controls laboratories[C]//SSEC Nov 8-10, 2005
[8]Saenz Otero A, Miller, D W.SPHERES:Platform for Formation Flying Research[R].SPIE code number:5899-25,2005
[9]Saenz Otero A, Miller D W.Distributed satellite system algorithm maturation with SPH ERES aboard the ISS[R].IAC-08-A2.6B4,2008
[10]Mohan S, Sang Otero A, Noler S, et al.SPHERES flight operations testing and execution[J].Act Ast ronautic, April, 2009
[11]Fejzic A, et al.Results of SPH ERES microgravity autonomous docking experiments in the presence of anomalies[R].IAC08-C1.5.1, 2008
[12]Saenz Otero A, Miller D W.Initial SPH ERES operations aboard the International Space S tation[C]// IAA Small Satellites for Earth Observation VI, Berlin, Germany, 23-26 Apr, 2007
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
井岡教育(2022年2期)2022-10-14 03:11:44
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
云南教育·中學教師(2020年9期)2020-11-16 00:27:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:00
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中學生數理化·八年級物理人教版(2017年9期)2017-12-20 08:11:28
中學生數理化·中考版(2017年12期)2017-04-18 12:55:05
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55