無人機低空攝影測量在電力工程中的應用
2010-02-08 06:32:22高福山胡吉倫
電力勘測設計 2010年2期
關鍵詞:測量
高福山,胡吉倫,王 黎
(中南電力設計,湖北 武漢 430071)
無人機低空攝影測量在電力工程中的應用
高福山,胡吉倫,王 黎
(中南電力設計,湖北 武漢 430071)
本文介紹了低空攝影測量在火電廠地形測量的應用嘗試及數據處理方法。結合現代航空攝影測量技術的發展,分析了低空攝影測量的特點;結合火電廠地形圖測量的實際情況,分析了低空攝影測量的作業流程,對通過低空攝影測量獲得的高程數據進行了精度評定,提供了利用外業實測高程數據對低空攝影測量高程數據進行擬合從而提高高程數據精度的處理方法。
低空攝影測量;影像數據;區域線性擬合。
1 概述
無人機低空攝影測量作為攝影測量一種特殊形式,可以在云下低空獲取高清晰度的數碼影像,采用數字攝影測量網格(Digital Photogrammetry Grid-DPGrid)進行影像處理,在JX4及VirtouZo測圖系統下生成數字地形圖。結合野外調繪及檢測數據,生成1∶1000-1∶2000地形圖。不僅解決了傳統工程測量周期長、數字地圖不直觀的不足,還大大減輕了野外技術人員勞動強度,提高測繪工作效率。在小區域小范圍內應用無人機航空遙感是解決工程用圖的有效手段和便捷途徑。
我院承接的華能正寧電廠一期(2×1000MW)項目,可研階段有三個廠址方案比選,而且都集中在一個約30km2的范圍內,測圖比例尺1∶1000,我們采用無人機低空飛行攝影測量技術,實施了該工程的測量任務。經過外野巡視測量及檢查點的檢測精度統計,成圖精度滿足規程規范的要求。本次工程在攝影數據處理方面得到了武漢大學遙感信息工程學院曹輝、王茜等老師的大力支持和幫助。下面介紹本次無人機低空攝影測量在正寧電廠一期工程中的應用情況。
2 無人機遙感攝影測量系統的組成
2.1 無人機性能
無人機工作參數:巡航空速:97km/h;最大飛行高度:海拔3500m;最大荷載:3.5G;航時:100min;標準作業航程:110km;巡航抗風能力:13m/s;起飛滑跑距離:60m;降落滑跑距離:150m;通訊距離:15km(無遮擋) 。
正寧電廠一期工程我院委托國遙萬維公司進行了無人機航攝工作。
2.2 數碼攝影相機
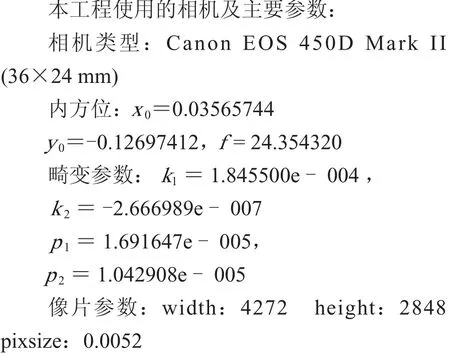
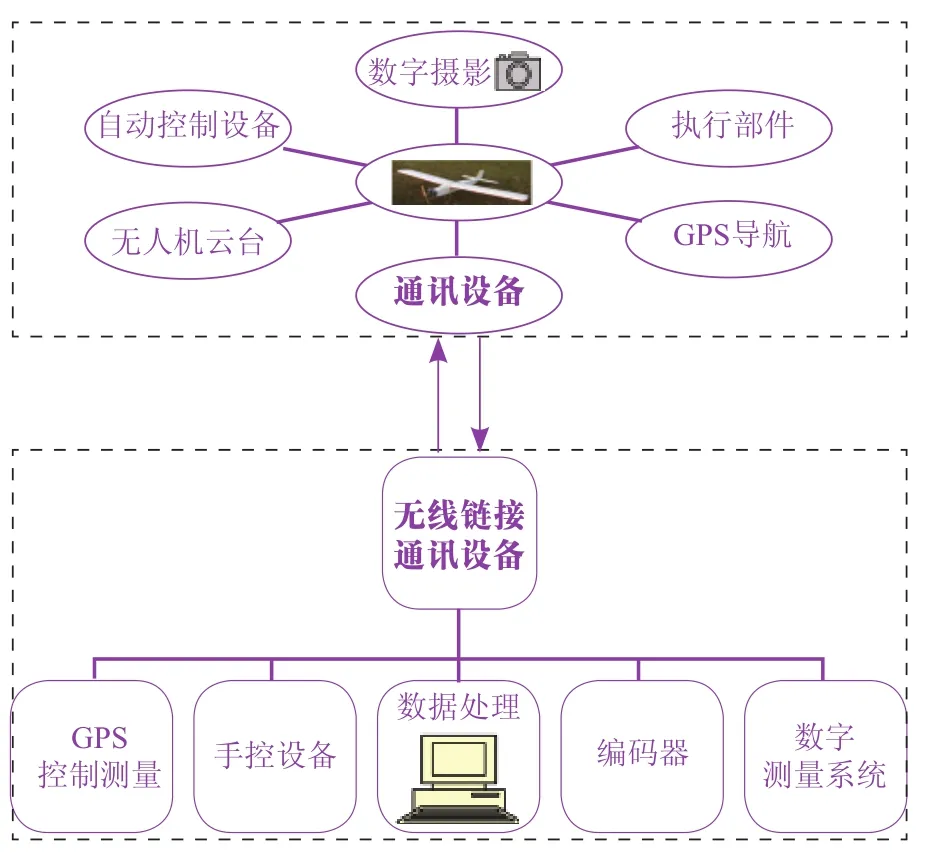
圖1 無人機低空攝影測量系統
3 測區攝影計劃和航帶規劃設計
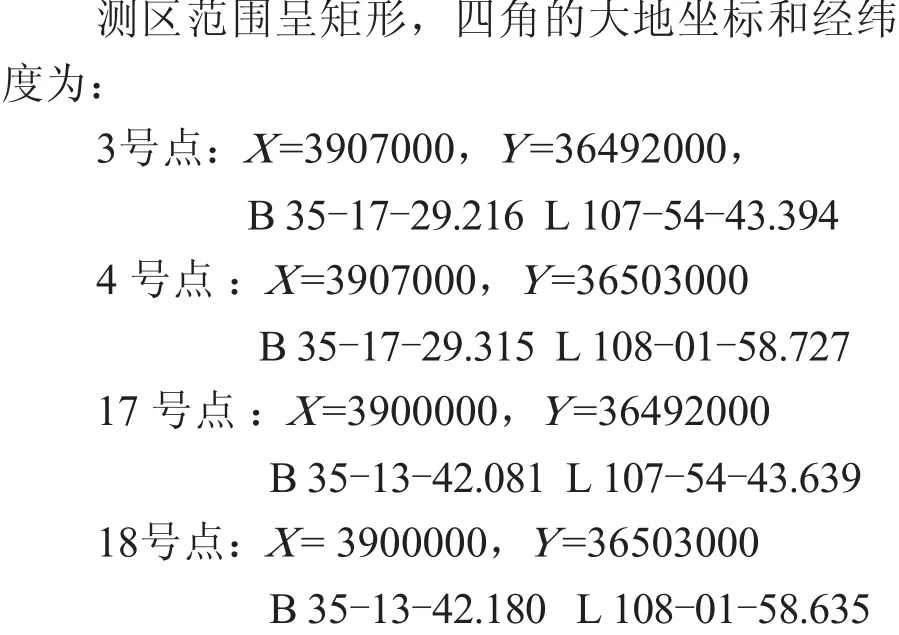
3.1 測區范圍
3.2 航帶設計
如圖2所示,1號點,無人機地面起降位置,按兩個架次飛行,預設16條航帶,一架次完成10條航帶飛行攝影后,返回地面補充燃料,進行第二次飛行完成6條航帶,完成全部測區所用時間1.5h,取得了測區30km2的影像數據。

圖2 航帶設計及飛行計劃
3.3 攝影質量
攝影時當地天氣晴朗,地面風速1-2級,拍攝時正値中午,溝壑底部的陰影影響較小,拍攝的數碼影像清晰,拍攝技術參數:
分辨率:0.2m 航高:500m
物理幅寬為:1123.2×748.8打印出的相片大小為:198×132cm
整個測區拍攝像幅500余幅,航向重疊滿足60%,旁向重疊達到30%的要求。
4 測區控制網的建立 外控及調繪
4.1 測區控制網的建立
在測區布設首級平面控制E級GPS點33個。平面控制系統采用1954年北京坐標系,108度中央子午線,高程控制系統采用1956年黃海高程系。
4.2 外控點布置及現場調繪
在電力工程項目中第一次應用無人機航攝技術,為保證測量精度和成圖的可靠性,采用全野外布置像控點方式,點位選在影像清晰,易于判刺和立體量測處,旁向上盡量利用共用點,盡量考慮像控點的均勻性。
重點調繪隱蔽性地物,利用動態GPS測量其具體位置,調查窯洞狀況等。
5 無人機低空攝影測量數據處理工作流程
5.1 影像數據處理流程
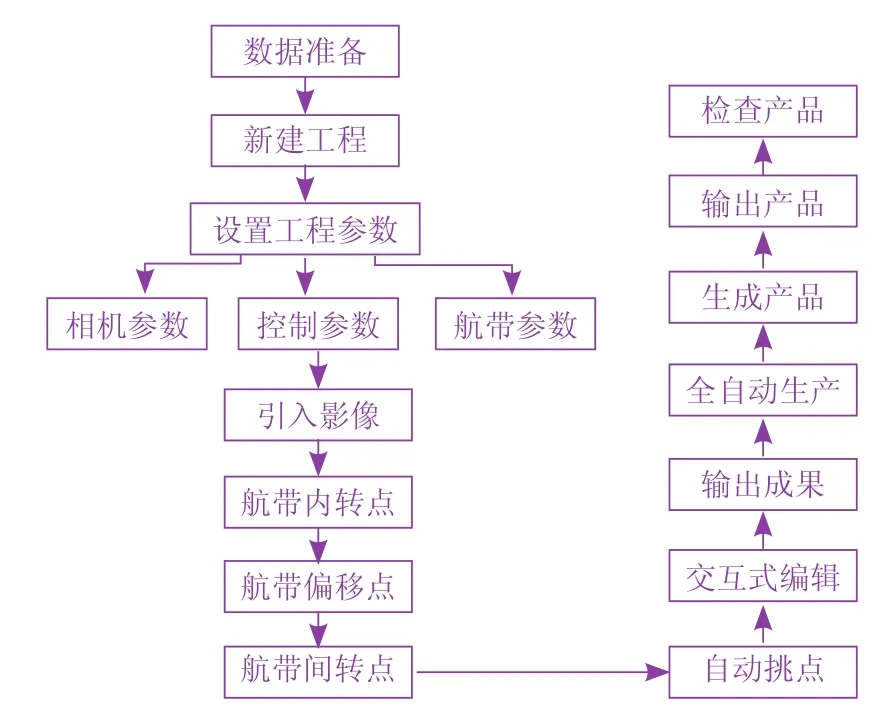
圖3 影像數據處理流程
利用武漢大學遙感院研制開發的新一代航空航天數字攝影測量處理平臺:數字攝影測量網格(Digital Photogrammetry Grid-DPGrid)進行本次的內業加密。
該系統的結構:由高性能集群計算機系統與磁盤陣列組成硬件平臺,以最新影像匹配理論與實踐為基礎的全自動數據處理系統。這一部分的主要功能包括:數據預處理、影像匹配、自動空三、數字地面模型以及正射影像的生成等。
5.2 相機畸變差改正、系統誤差改正
空間物體表面某點的三維幾何位置與其在圖形中對應點之間的相互關系,是由相機的成像幾何模型決定,理想的成像模型是線性的,但是由于光學鏡頭的結構與理想的針孔模型存在著差異,使得圖像產生非線性畸變。鏡頭畸變成像會對計算機視覺領域中的視覺測量與三維帶來極大影響。小像幅數碼相機普遍存在較大的光學畸變差。如果不進行畸變差改正,后續全自動相對定向及全自動模型連接的成功率會大大降低,從而使生產效率大幅下降。
較大的光學畸變差,會導致整個像點網強度變低甚至自由網構建失敗,必定影響光束發平差的收斂速度及成功率。因此必須進行畸變差改正。
未經處理的影像數據有攝影機的系統誤差(主點偏移),底片變形,航攝飛機的系統誤差,大氣折光誤差,地球曲率等系統誤差等,測圖系統中的定位精度與空三精度相差較大。經過系統誤差改正以后,平面精度及高程精度都有較大提高,因此測繪更大比例尺地形圖才成為可能。
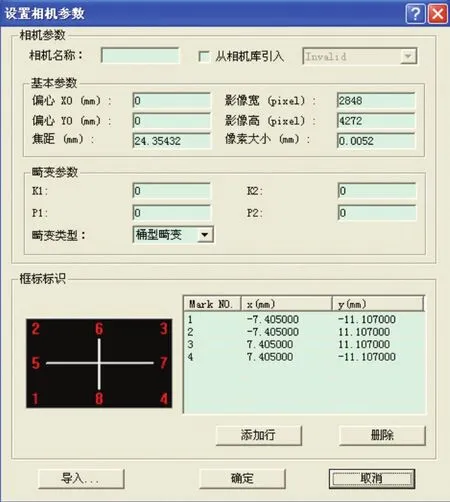
圖4 改正后相機參數
5.3 外業控制點文件與影像引入
程序引入外業像片控制點及原始影像,并對原始影像的畸變和主點進行改正、影像的旋轉(按飛行和航線重疊方向)等。
5.4 交互編輯
首先在當前測區的四角人工量測4個外業控制點,再調用空三計算,點擊預測控制點計算,則可顯示全測區的控制點,點擊預測控制點精確對準當前點,程序可自動匹配其余影像上的當前點。
6 空三解算
以投影中心點、像點和相應地面點三點共線條件所建立的單張像片為計算單元,借助像片之間的同名點和野外控制點,聯合進行整個區域的光束平差解算,并對統計結果進行評估,如果存在較大殘差點,進行交互式編輯,在連接點充足的情況下刪掉殘差較大的像點。提高區域網平差精度。
空三解算完成后,檢查加密精度,輸出空三成果。

圖5 測區部分正射影像
7 數字化測圖
在JX4上完成測區線畫圖測量,在野外對線畫圖進行巡視檢查,電力線、管線等補測,地物、地形檢測。測區地物平面檢測統計精度為:±0.5m ,高程檢測統計精度為: ±0.4m。
國標GB/T 15967-2008《1∶500 1∶1000 1∶2000地形圖航空攝影測量數字化測圖規范》中規定平面位置中誤差:平地、丘陵地:不應大于測圖比例尺的0.6mm,即對于1:1000比例尺地形圖不應大于0.6m,高程中誤差:1∶1000地形圖平地±0.2m(±0.4m),丘陵地±0.5m,由于測區部分為平地,部分為溝塹丘陵地,對于平地部分還不能滿足規范要求。
為了提高測區高程精度,我們在《大比例尺地形圖測圖軟件》中,讀入JX4測量線畫圖,以野外補測、檢測高程為依據,對航測內業高程點進行區域線性擬合,使測區高程誤差逐漸趨于最小。
我們對改正后的地形點進行實地再次檢測,其高程差值均小于0.2m,統計計算高程誤差為:±0.16m。完全滿足規范要求。
8 幾點體會
通過這次實踐,我們體會如下:
⑴ 無人機航空遙感系統具有全天候、全天時、低成本等技術優勢,其所獲得的高分辨率遙感數據可應用于多種領域,以快捷便利的方式獲取野外影像數據,減輕野外作業勞動強度,提高生產效率,滿足電力工程地形圖測量的需要。如:工程前期地形圖的測繪,工程擴建補充地形圖,線路終勘改線局部偏離航片的補充飛行等。
⑵ 低空攝影測量,通過空三加密處理后,測繪出的線畫圖,在結合外業檢測、補測數據的綜合處理下,其地形圖的精度滿足航測規范要求,可以在實際工程中應用。
⑶ 基于攝影測量新理論,多目視覺,多基線立體的思想,可以改善“匹配”可靠性。在實際應用中,采取高重疊度飛行攝影(航向80%,旁向60%),增加交會角,增加多余觀測,減少外業控制點,提高高程精度。
[1]張祖勛,張劍清.數字攝影測量學[M].武漢:武漢大學出版社,1997.
[2]姜大志,郁倩,等.計算機視覺成像的非線性畸變研究與綜述[J].計算機工程,2001,27(12).
Application of Low-altitude UAV Photogrammetry in Power Engineering
GAO Fu-Shan, HU Ji-Lun, WANG Li
(Central Southern Electric Power Design Institute, Wuhan 430071, China)
This paper introduces the application of topographic survey and data processing methods by Low-altitude UAV photogrammetry at thermal power plant.Compare with modern aerial photographic measurement technology,the paper analyzed the characteristics of low-altitude aero-photogrammetry and low-altitude photogrammetric work fl ow combined with measurement of power plant topographic map .By assessing the precision of the low-altitude photogrammetric elevation data, provide the data processing method of improving the precision by fi led elevation data and regional linear fi t method .
low-altitude photogrammetry; image data; regional linear fi tting.
P2
B
1671-9913(2010)02-0019-04
2010-02-02
高福山(1962-),男,陜西子長縣人,高級工程師。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
