電噴發動機過渡工況空燃比魯棒控制研究*
2010-03-19 01:17:58石向南鄧元望
湖南大學學報(自然科學版) 2010年9期
石向南,鄧元望,朱 浩
(湖南大學汽車車身先進設計制造國家重點實驗室,湖南長沙 410082)
為了降低發動機污染物的排放和燃料消耗,需將空燃比精確控制在理論空燃比附近.實際空燃比的微小變化會引起三效催化轉化效率的嚴重降低.許多控制理論和方法,如經典控制理論、現代控制理論和自適應控制理論等,都要求控制對象有精確的模型或模型的不確定性滿足特殊的假定,本文研究的空燃比控制中,由于系統存在不確定性因素的影響[1-2],要獲得控制對象的精確模型非常困難,甚至不可能.當發動機處于穩態工況時,傳統的電控噴射系統能較好地實現對空燃比的精確控制;但是車用電噴發動機在實際運行工況中,有相當多的時間處于過渡工況運行.在過渡工況時,由于存在不同于穩態工況時的不確定因素影響,使得發動機空燃比在控制時出現偏差,從而不能滿足日益嚴格的排放法規對空燃比控制精度的要求[3-4].考慮到最優H∞控制理論是實現魯棒控制的重要工具和手段,針對這些不確定因素的影響,本文采用了最優H∞魯棒控制的方法來實現過渡工況下空燃比控制,并且進行了仿真驗證.
1 最優H∞魯棒控制理論
1.1 最優H∞控制問題結構
H∞魯棒控制理論是通過某些性能指標的無窮范數優化而得到具有魯棒性能的控制器的一種控制理論,標準的H∞控制問題如圖1所示.
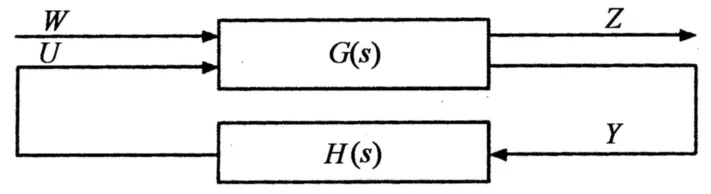
圖1 H∞標準控制問題框圖Fig.1 H∞standard control problem block diagram
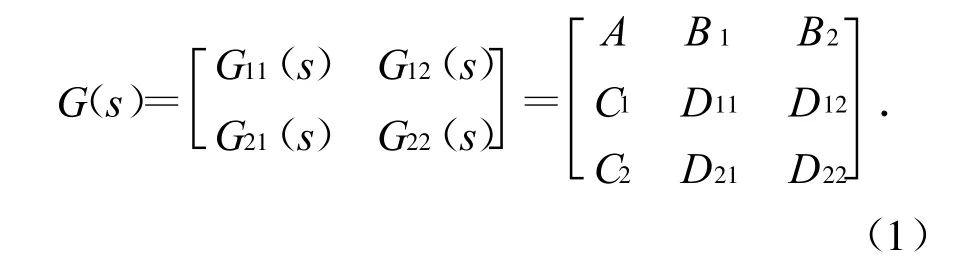
圖1中,信號均為向量值的信號:W為外部輸入信號,包括參考信號、干擾和傳感器噪聲信號;s為頻率域;U為控制信號;G(s)為廣義的被控對象;Z為被控對象的輸出信號;Y為測量輸出信號;H(s)為控制器,是待設計的部分.在圖1中,引入了增廣的對象模型,該模型可表示為:
從W到Z的閉環傳遞函數為:

H∞最優設計問題就是對于給定的廣義被控對象G(s),求反饋控制器K(s),使得閉環傳遞函數穩定,且使‖TWZ(s)‖最小.
1.2 混合靈敏度優化設計
許多控制問題都可以轉化為標準的H∞控制問題.同時抑制干擾和受控對象的不確定性稱為混合靈敏度問題,求解混合靈敏度優化問題常采用增廣對象的狀態空間表達式來進行,選擇頻域內的加權函數,使其滿足系統設計要求,然后轉化成狀態空間的形式進行優化設計.在本研究中,所研究的發動機一方面在運行中會受到因節氣門突變而引起的干擾;另一方面因建模需要和系統偏差的存在而產生未建模動態,這兩方面的問題正是在進行混合靈敏度設計時所能解決的.電噴發動機空燃比控制系統最優H∞加權混合靈敏度設計問題的模型如圖2所示.
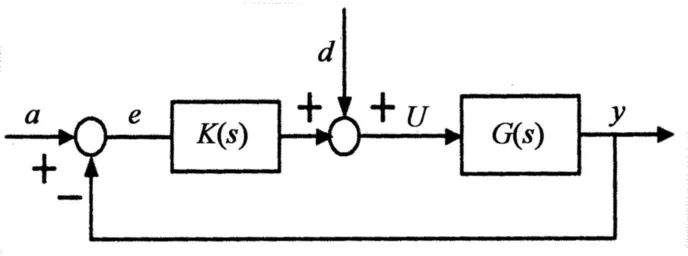
圖2 空燃比控制系統Fig.2 A/F control system
圖2中a為參考輸入信號;e為空燃比誤差;U為控制輸入;d為外部干擾;y為系統輸出信號;G(s)為受控對象電噴發動機;K(s)為最優H∞控制器.引入加權函數W1(s)和W2(s),其中,W1(s)表示對系統性能要求的約束,通過調整可以有效地抑制干擾的影響,獲得希望的輸出信號;W2(s)反映了對乘性不確定性的限制,由被控對象本身決定.
從r至e,y的傳遞函數分別為:

其中:S(s),T(s)分別稱為靈敏度函數和混合靈敏度函數.
將其增廣對象模型作以下設置:
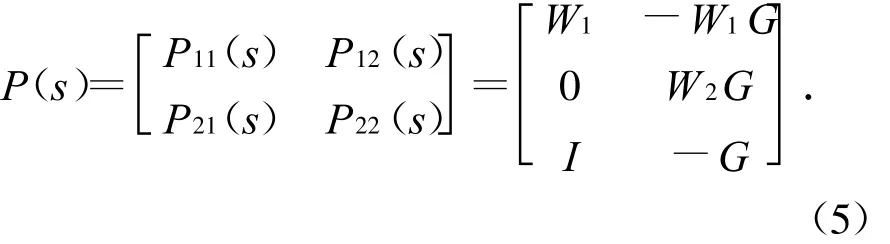
系統的閉環傳遞函數為

求解混合靈敏度問題的目的就是尋找控制器K(s),使得系統閉環穩定,且使Tcl的范數最小.當選好加權函數W1(s)和W2(s)后,即可進行控制器K(s)的設計.
1.3 加權函數的選擇
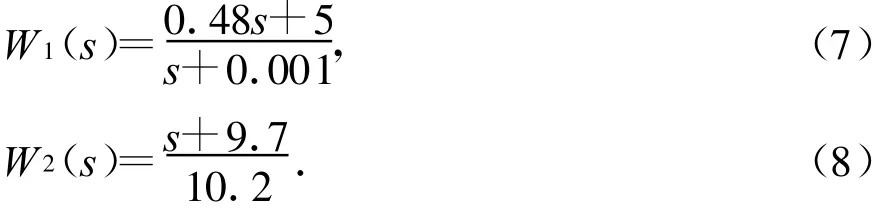
由于加權函數W1(s)和W2(s)與反饋控制系統的靈敏度函數和補償靈敏度函數的形狀有直接的關系,通過合理的選擇可使閉環控制系統的靈敏度函數和補償靈敏度函數按照希望的規律變化,能夠保證系統具備較強的魯棒穩定性,對輸入命令也有很好的跟蹤能力和良好的抗干擾能力以及抑制噪聲能力.加權函數W1(s)由系統性能要求來決定,要求其能有效地抑制干擾的影響及精確地跟蹤輸入信號,即一般應具有高增益低通特性;加權函數W2(s)由受控對象本身特性來決定,反映了魯棒穩定性的要求,一般應具有高通濾波特性.本研究中,利用文獻[5]闡述的加權函數選取規則和設計要求,分別選取
2 最優H∞魯棒控制理論應用
2.1 發動機不確定性分析
在實際工程控制中,由于種種原因系統總是存在著不確定性,這種不確定性通常分為兩類:一是外部的不確定性,如干擾等;二是內部的不確定性,如測量誤差、參數估計誤差以及未建模動態等.
在發動機運行過程中,進氣、噴油以及負荷等因素發生變化都會導致空燃比發生變化,影響發動機空燃比的穩定性,這些內部的不確定性在發動機的未建模動態來考慮,發動機在運行過程中不確定的滯后時間等都作為發動機的建模不確定性;而發動機由于老化、磨損等原因造成了發動機的參數不確定性,這是由于傳感器的噪聲輸入,以及發動機運轉過程中的干擾輸入都作為參數的不確定性.
2.2 空燃比控制系統模型的建立
在本研究中,選用國內某廠家生產的一款電噴汽油機為研究對象,其系統具有十分復雜的非線性特征,它包括了空氣動態、燃料動態、排氣系統動態以及傳感器動態等,其各種參數隨著運行環境和工況的變化而變化,因此,很難對各物理過程進行精確的數學描述,從而難以建立非線性系統精確的數學模型.在實際設計過程中,較常用的方法是使用簡化的低階線性系統模型來近似描述復雜的發動機系統.對于電噴發動機過渡工況下的空燃比控制,本研究采用的閉環控制系統模型如圖3所示:
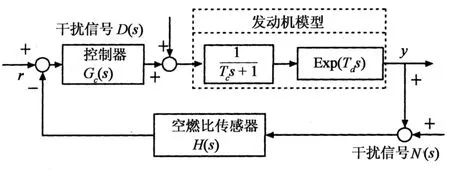
圖3 發動機閉環系統控制模型Fig.3 Engine closed-loop control system model
圖3中,D(s)為外界的干擾信號;Gc(s)為要求解的控制器;Tc為空氣與燃料的混合時間;Td為傳輸時間延時;y為實際的輸出量(指實際空燃比);N(s)為系統測量時的干擾信號;H(s)為空燃比傳感器模型.
在發動機實際運行過程中,參數Tc和Td具有不確定性,這里采用了文獻[6]的算法,確定了參數Tc和Td的變化范圍,設計的最優H∞控制器必須在這些參數變化的范圍內都具有魯棒穩定性和抗干擾能力.
2.3 最優H∞魯棒控制器的設計
當確定空燃比控制系統模型參數的變化范圍之后,利用式(7)和式(8)即可進行最優H∞魯棒控制器的設計.本文中的電噴發動機空燃比控制系統模型中含有一時間遲滯非線性環節,在此,采用時間滯后函數的pade近似和閉環系統的近似分布,將其近似為線性系統來處理[7].Td的標稱值為0.03 165,編寫MAT LAB程序可直接求得近似的時間遲滯環節G2(s)為:

Tc的標稱值為0.20,H為0.1s,則可以計算出空燃比控制系統的標稱對象模型G(s)為:

標稱對象模型狀態方程的系數矩陣為:
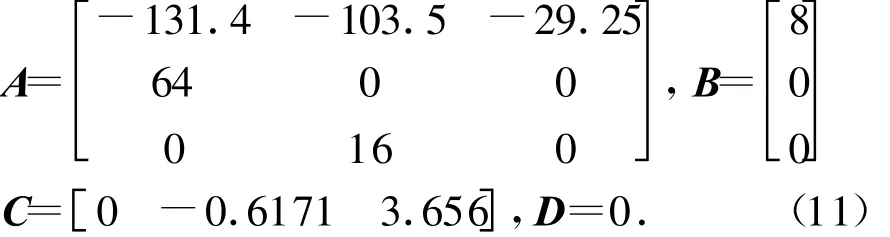
把式(7),式(8)和式(11)代入式(5)得到了增廣對象模型,在此基礎上對式(6)進行迭代計算,經過14代的迭代計算后,可以求解出最優H∞控制器Gc(s)為:

3 仿真模型的建立
3.1 基于GT-Power的電噴發動機仿真模型
本文選用國內某廠家生產的一款電噴汽油機為仿真研究對象,根據其物理模型及相關參數,采用面向對象的GT-Power仿真軟件,從物理模型出發建立了電噴發動機仿真模型,如圖4所示.整個模型包括:進氣管、氣缸、曲軸箱、排氣管以及Matlab/Simulink空燃比控制模塊等.
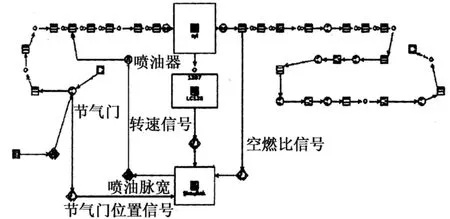
圖4 電噴汽油機仿真模型Fig.4 Electronic fuel injection engine simulation model
3.2 聯合仿真平臺的建立
運用Matlab/Simulink與GT-Power的接口,利用圖4建立的發動機結構模型,在Matlab/Simulink中建立其空燃比實時控制系統仿真模型,建立的聯合仿真平臺如圖5所示.ECU輸出的噴油脈寬由兩部分的輸出疊加而成:一部分為根據發動機轉速和節氣門位置信號查表所得,即為基本噴油脈寬;另一部分通過最優H∞魯棒控制器或PI控制器根據空燃比傳感器反饋的信號計算所得,即為修正的噴油脈寬.
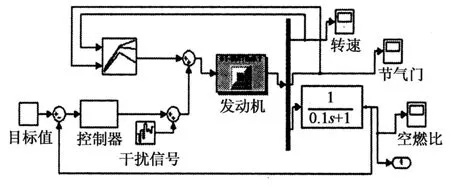
圖5 空燃比聯合仿真實時控制仿真模型Fig.5 Electronic fuel injection engine real-time control model
4 仿真分析研究
4.1 控制器性能的對比分析
傳統的發動機空燃比控制采用PI控制器,即比例積分控制[8].針對本文的過渡工況空燃比控制,采用基于IST E準則的PI控制器參數設計得到其控制器參數分別為:Kp=0.65,Ki=7.88.
為了驗證最優H∞控制器的優越性,對求解出的最優H∞控制器與PI控制器在Simulink軟件中建立模型進行仿真對比測試,以初始的單位階躍信號為輸入信號,同時還加入了一噪聲信號來模擬測量噪聲,并在仿真的第5 s時加入了幅值為0.5的脈沖干擾信號來模擬發動機節氣門的突變情況,對電噴發動機運行在不同的轉速時分別進行了仿真,其結果如圖6~圖8所示.
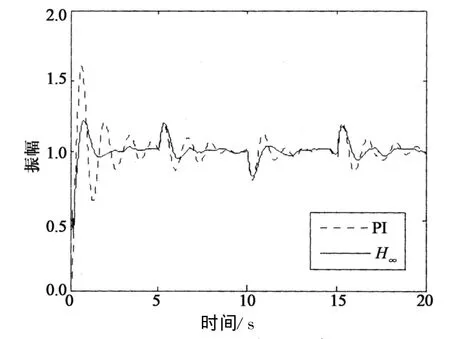
圖6 V=3 000 r/min系統仿真結果比較Fig.6 Comprison of simulation results for V=3 000 r/min
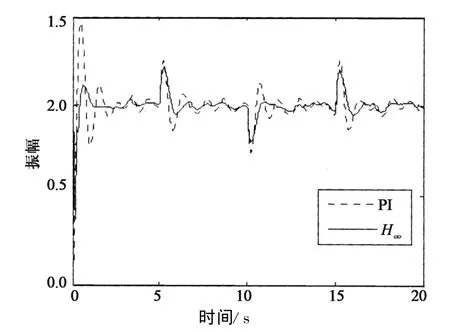
圖7 V=5 000 r/min時系統仿真結果比較Fig.7 Comprison of simulation results for V=5 000 r/min
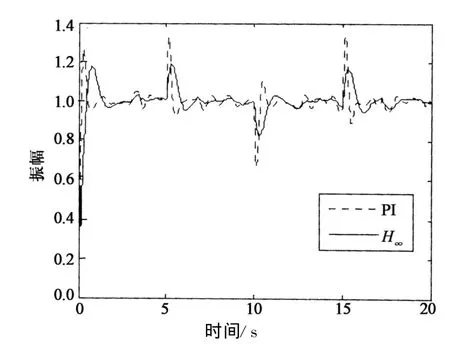
圖8 V=9 000 r/min時系統仿真結果比較F ig.8 Comprison of simulation results for V=9 000 r/min
由仿真結果可以看出,最優H∞控制器對于參數的變動具有較強的魯棒性,系統的輸出量變化平緩,并且很快達到了穩定值,過渡的時間較短,超調量較小;在受到擾動干擾時,系統可以很快地恢復到穩定值,對于施加的干擾噪聲也有很好的抑制作用.相對于PI控制器,最優H∞控制器在過渡時間、超調量、抗干擾能力等方面都要優于PI控制器.
4.2 控制器的聯合仿真平臺測試
在圖5建立的聯合仿真平臺中,進行最優H∞控制器和PI控制器的仿真對比測試.設定發動機轉速為5 000 r/min,節氣門的初始值為20 mm,空燃比的目標值為14.7,加入的噪聲信號強度為1;當仿真進行到第5 s時,改變節氣門的直徑值為30 mm,當仿真進行到第10 s時,改變節氣門的直徑值為20 mm,其他參數不變.以適當的步長運行仿真模型,空燃比波動情況如圖9所示.
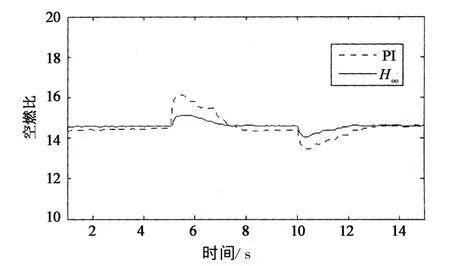
圖9 節氣門突變時空燃比穩定性比較Fig.9 Comprison of A/F stability as throttle sudden change
由圖9可見:電噴發動機處于穩態工況時,兩種控制器均能把空燃比控制在理論值附近;當在過渡工況時,即節氣門的直徑突變時,與PI控制相比,最優H∞魯棒控制的超調量較小,而且恢復時間也較短.
5 結 論
1)發動機在實際運行過程中都存在一些外部干擾,同時在建模的過程中也存在系統模型的不確定性,本文在充分考慮這些不確定性的基礎上,建立了最優H∞控制器.2)運用GT-Power與Matlab/Simulink的接口,建立了電噴發動機空燃比實時控制仿真平臺,仿真結果表明:無論在穩態工況還是過渡工況,建立的最優H∞控制器都具有很好的跟蹤性、魯棒穩定性以及抗干擾能力.
3)建立的聯合仿真平臺為發動機的仿真及其控制系統開發提供了一種新的方法,其意義在于利用發動機的物理參數,在開發的早期檢驗其控制系統,從而節約開發的時間和成本.
[1] 龔金科,尤麗,蔡浩,等.車用三效催化轉化器劣化性能數值模擬[J].湖南大學學報:自然科學版,2008,35(1):36-40.GONG Jin-ke,YOU Li,CAI Hao,et al.Numerical simulation of the deterioration performance of automotive three-way cataly tic converter[J].Journal of Hunan University:Natural Sciences,2008,35(1):36-40.(In Chinese)
[2] 楊小龍,楊靖,林鐵平.丁醇汽油對發動機性能影響的實驗研究[J].湖南大學學報:自然科學版,2010,37(2):32-35.YANG Xiao-long,YANGJing,LINTie-pin.Experimental study of the effects of butanol-gasoline blend on engine performance[J].Journal of Hunan University:Natural Sciences,2010,37(2):32-35.(In Chinese)
[3] WON M,CHOI S B.Air-to-fuel ratio control of spark ignition engines using Gaussian network sliding control[J].IEEE Tranmction on Control System T echnolojy,1998,6(5):678-687.
[4] 張欣,夏淵,李國岫,等.車用稀燃增壓單一燃料CNG發動機電控系統的研究[J].中國公路學報,2003,16(1):114-117.ZHANG Xin,XIA Yuan,LI Guo-xiu,et al.Study of electric control sy stem for lean burn turbocharged CNG vehicle engines[J].China Journal of Highway and Transport,2003,16(1):114-117.(In Chinese)
[5] 吳旭東,解學書.H∞魯棒控制中的加權陣選擇[J].清華大學學報:自然科學版,1997,37(1):27-30.WU Xu-dong,XIE Xue-shu.Weighting function matrix selection in H∞robust control[J].Journal of Tinghua University:Natural Sciences,1997,37(1):27-30.(In Chinese)
[6] 宮喚春.電噴汽油機過渡工況空燃比控制方法研究[D].長沙:長沙理工大學汽車與機械工程學院,2008.GONG Huan-chun.Research on transient air fuel ratio control of sI engine[D].Changsha:College of Vehicle and M echinical Engineering Changsha University of Science and Technology,2008.(In Chinese)
[7] SCHNEIDER D.An experimental study of correlations between ionic current and operating parameters in SI engine[D].Bell&Howell Information and Learning,2000:10-22.
[8] YU Chang-bo,WANG Jian-jun,LI Qi-han.GT2008—50960 ASME,on the individual and combined effects of intentional mistuning,coup ling and damping on the forced response of bladed disks[S].2008.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
電子制作(2018年11期)2018-08-04 03:25:42
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
汽車與新動力(2015年1期)2015-02-27 12:11:01