無(wú)人飛行器在線航跡規(guī)劃技術(shù)研究
2010-03-23 08:56:12胡中華
航天電子對(duì)抗 2010年4期
關(guān)鍵詞:規(guī)劃
胡中華,趙 敏
(南京航空航天大學(xué)自動(dòng)化學(xué)院,江蘇南京 210016)
0 引言
域內(nèi)完成任務(wù),同時(shí)保存自己,達(dá)到最佳的作戰(zhàn)效果,此即無(wú)人飛行器航跡規(guī)劃[1]。
隨著高新技術(shù)的發(fā)展,現(xiàn)代戰(zhàn)爭(zhēng)已經(jīng)呈現(xiàn)出明顯的無(wú)人化趨勢(shì)。在未來(lái)信息化戰(zhàn)爭(zhēng)中,無(wú)人飛行器將扮演越來(lái)越重要的角色。因此,在實(shí)時(shí)環(huán)境中,不僅要求在有限的、盡可能短的時(shí)間內(nèi)為無(wú)人飛行器迅速地規(guī)劃出下一段可飛航跡,而且要求在周?chē)h(huán)境發(fā)生變化時(shí),無(wú)人飛行器能夠“感知”到這種變化并迅速根據(jù)新的信息重新對(duì)路徑進(jìn)行尋優(yōu),找出在滿足無(wú)人飛行器系統(tǒng)機(jī)動(dòng)性能約束條件下,無(wú)人飛行器生存概率最大且經(jīng)濟(jì)效益最大的參考航跡,使得執(zhí)行戰(zhàn)術(shù)任務(wù)的無(wú)人飛行器能突防戰(zhàn)場(chǎng)的威脅環(huán)境,并在敵方防空區(qū)
1 在線航跡規(guī)劃問(wèn)題的描述
根據(jù)不同的任務(wù)環(huán)境,無(wú)人機(jī)航跡規(guī)劃可分為靜態(tài)規(guī)劃和動(dòng)態(tài)規(guī)劃。
靜態(tài)規(guī)劃是根據(jù)先驗(yàn)數(shù)據(jù)人為給定任務(wù)環(huán)境,然后把預(yù)先規(guī)劃好的最優(yōu)路徑裝載在無(wú)人機(jī)上,無(wú)人機(jī)自動(dòng)駕駛沿預(yù)定航線飛行。關(guān)于靜態(tài)規(guī)劃(離線規(guī)劃)問(wèn)題,許多學(xué)者作了大量的工作,智能算法方面主要有:A*算法、遺傳算法、蟻群算法等等;航跡幾何建模方面主要有:通過(guò)構(gòu)建威脅場(chǎng)的Voronoi圖,得到回避威脅的航跡段,再用Dijstra法求解最優(yōu)路徑。這種方法的缺點(diǎn)是預(yù)先給定的戰(zhàn)場(chǎng)環(huán)境太過(guò)簡(jiǎn)化,限制了實(shí)際可行路線;在無(wú)人機(jī)規(guī)避障礙物研究中,常用柵格法和人工勢(shì)場(chǎng)法,柵格法速度隨著規(guī)劃空間的復(fù)雜度迅速變慢,人工勢(shì)場(chǎng)法也存在避障缺點(diǎn)[2]。
動(dòng)態(tài)規(guī)劃(在線規(guī)劃)即根據(jù)環(huán)境變化,無(wú)人機(jī)實(shí)時(shí)做出反應(yīng),重新規(guī)劃路徑[3]。無(wú)人機(jī)動(dòng)態(tài)航跡規(guī)劃需要考慮無(wú)人機(jī)機(jī)動(dòng)性能約束及威脅場(chǎng)約束。在未知環(huán)境下,威脅場(chǎng)具有突發(fā)特性,主要包括隨機(jī)風(fēng)場(chǎng)、地理障礙、雷達(dá)、導(dǎo)彈及高炮等威脅源。也就是說(shuō),應(yīng)考慮無(wú)人機(jī)在飛行過(guò)程中能根據(jù)位置變化獲取傳感信息、進(jìn)行信息融合,并結(jié)合預(yù)定任務(wù)進(jìn)行動(dòng)態(tài)航跡規(guī)劃,將規(guī)劃的結(jié)果以指令方式發(fā)送給機(jī)載自動(dòng)駕駛儀,從而控制舵機(jī)實(shí)現(xiàn)按規(guī)劃的航跡飛行。
2 動(dòng)力學(xué)約束
動(dòng)力學(xué)約束主要包括以下幾個(gè)方面。
1)最大爬升角 在三維航路規(guī)劃時(shí)必須考慮無(wú)人機(jī)的最大爬升角。影響最大爬升角的因素主要包括無(wú)人機(jī)的發(fā)動(dòng)機(jī)性能、翼型及翼面、飛行高度及氣候狀況,通常通過(guò)控制水平尾翼及增加推力實(shí)現(xiàn)爬升。爬升角不能過(guò)大,太大則失去爬升率,有可能導(dǎo)致無(wú)人機(jī)失速,因此存在最大爬升角,一般飛行狀態(tài)下,爬升角近似等于俯仰角,如圖1所示。因此,爬升角可表示為:

或者

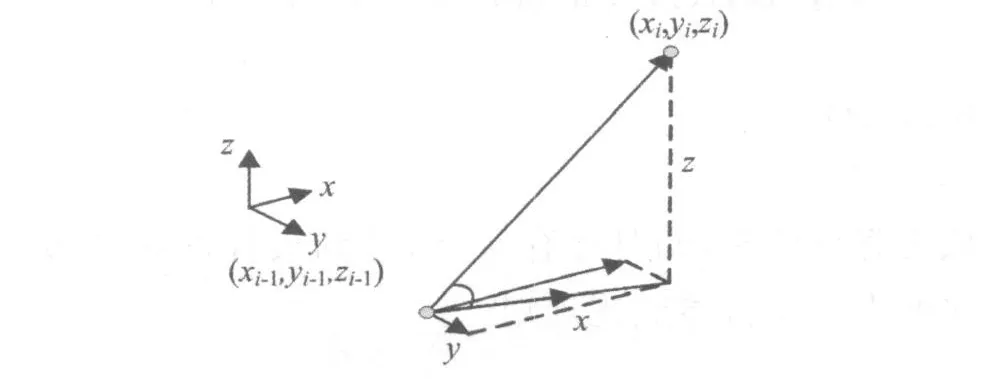
圖1 爬升角幾何模型
式中,γ表示爬升角,(xi-1,yi-1,zi-1)表示飛機(jī)航向尾部點(diǎn)坐標(biāo),(xi,yi,zi)表示飛機(jī)航向機(jī)頭坐標(biāo)。
2)最大航程 無(wú)人機(jī)在整個(gè)飛行過(guò)程中的飛行路程,受到飛機(jī)燃油和飛行時(shí)間配給的限制。設(shè)最大航跡長(zhǎng)度為L(zhǎng),則每一個(gè)航段距離li應(yīng)滿足:
3)無(wú)人機(jī)的最小飛行高度 設(shè)每一段航路飛行高度為Hi,則H i應(yīng)滿足:H i≥H min,(i=1,…,n)。不同于二維航路規(guī)劃僅考慮水平方向航路規(guī)劃,三維航路規(guī)劃必須考慮地形威脅,因此要考慮高度影響。飛行器被敵方探測(cè)器發(fā)現(xiàn)或被地面防御系統(tǒng)摧毀的概率隨高度的增加而增加。而飛得過(guò)低往往會(huì)使得與地面相撞的墜毀概率增加[4]。因此,要在減少被地面防御系統(tǒng)摧毀的概率和減少墜毀概率之間進(jìn)行折中。搜索過(guò)程中每一個(gè)待擴(kuò)展的節(jié)點(diǎn),只有當(dāng)它的高度大于或等于給定的最小值H min時(shí),才把它作為可能的航跡點(diǎn)。H m in表示離地面的豎直距離,而非海拔高度。該項(xiàng)指標(biāo)驅(qū)使航跡規(guī)劃算法去獲得低高度的飛行航跡,提高地面掩護(hù)效果。
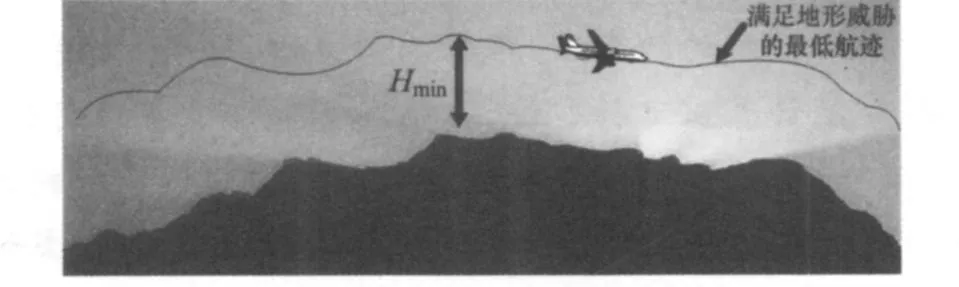
圖2 最小威脅曲面示意圖
因此,考慮地形威脅的作用,同時(shí)結(jié)合飛行器的撞地概率,當(dāng)飛行器以高度H m in離地飛行時(shí),認(rèn)為其地形威脅最小。因此,在原地形曲面上考慮威脅信息的抬高作用,由所有距離地表高度為Hmin的點(diǎn)構(gòu)成威脅曲面。飛行在該曲面上的無(wú)人飛行器受地形威脅最小,由此得到最小威脅曲面如圖2所示。假設(shè)地形可以用函數(shù)z=f(x,y)表示,則最小威脅曲面為:

4)最小步長(zhǎng) 為無(wú)人飛行器在改變飛行姿態(tài)前必須直飛的最短距離,即以最低(巡航)速度飛行1s的距離,以RO-9無(wú)人機(jī)為例,巡航速度130km/h,也就是36m/s,可以簡(jiǎn)化為40m/s,對(duì)于設(shè)定范圍是400km的作戰(zhàn)空間,則可以劃分為100格。設(shè)最小步長(zhǎng)L min,則無(wú)人機(jī)在改變飛行姿態(tài)時(shí)必須滿足:

圖3中,設(shè)a為當(dāng)前航路點(diǎn),b1、b2、b3、b4、b5為待選的5個(gè)航路點(diǎn),分別對(duì)應(yīng)的步長(zhǎng)為L(zhǎng)1、L2、L3、L4、L5,其中,僅L1和L4小于最小步長(zhǎng)L min,因此,從滿足步長(zhǎng)程度來(lái)選擇L2、L3、L5滿足最小步長(zhǎng)約束,可以作為下一步長(zhǎng)的待選節(jié)點(diǎn)。
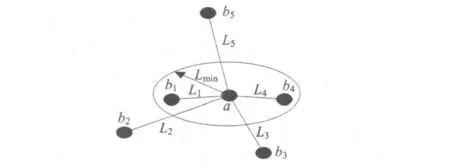
圖3 最小步長(zhǎng)選擇圖
5)無(wú)人機(jī)的最大轉(zhuǎn)彎角度φ 設(shè)航跡點(diǎn)(xi,yi)或(xi,yi,zi),設(shè)每一航段向量q=(x1-xi-1,y1-yi-1,z1-zi-1),則最大轉(zhuǎn)彎角約束可寫(xiě):

3 威脅場(chǎng)約束
無(wú)人機(jī)在飛行過(guò)程中要考慮威脅源(包括地理障礙、惡劣氣候、敵方武器陣地等)的空間位置、威脅源半徑、威脅源類(lèi)型等限制。假設(shè)敵方雷達(dá)位置坐標(biāo)(xi,yi),掃描半徑ri,i=1,…,m,則區(qū)域((a-xi)2+(b-yi)1/2)≤ri為不可飛區(qū),必須繞過(guò)這些區(qū)域,如圖4陰影部分所示。
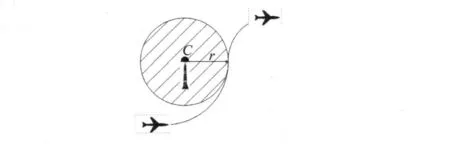
圖4 無(wú)人機(jī)繞過(guò)威脅區(qū)示意圖
具體規(guī)劃過(guò)程中,主要包括:
1)路線搜索:以出發(fā)點(diǎn)及可行路線與包絡(luò)的交點(diǎn)作為搜索起點(diǎn),攻擊路線進(jìn)入點(diǎn)作為終止點(diǎn),進(jìn)行路線的搜索,搜索方法采用深度優(yōu)先法。
2)威脅場(chǎng)分區(qū):將整個(gè)規(guī)劃區(qū)域內(nèi)的威脅場(chǎng)按相互連接關(guān)系進(jìn)行分組。
3)可行路線識(shí)別及網(wǎng)絡(luò)建立:識(shí)別出不同威脅場(chǎng)組間的可行路線,并將所有的可行路線按可能的連接關(guān)系構(gòu)造成路線網(wǎng)絡(luò)。
4)威脅場(chǎng)包絡(luò)識(shí)別及綜合網(wǎng)絡(luò)建立:識(shí)別出規(guī)劃區(qū)域中包含所有威脅場(chǎng)的外邊界,并確定可行路線網(wǎng)絡(luò)、進(jìn)攻路線及包絡(luò)的連接關(guān)系。
4 在線航跡規(guī)劃研究現(xiàn)狀及算法
近年來(lái),無(wú)人機(jī)的應(yīng)用推動(dòng)了航跡規(guī)劃的研究。目前美國(guó)研制的航跡規(guī)劃系統(tǒng)已經(jīng)發(fā)展到第三代,正朝著提高效能和降低系統(tǒng)成本等方面繼續(xù)發(fā)展。最有代表性和最著名的航跡規(guī)劃系統(tǒng)是美國(guó)空軍的NUH-60A STAR直升機(jī)所裝備的航跡規(guī)劃系統(tǒng)。英國(guó)已研制成功Pathfinder 2000航跡規(guī)劃系統(tǒng)。法國(guó)目前裝備有M IPSY,CINNA和CIRCE2000等系列航跡規(guī)劃系統(tǒng)。現(xiàn)代無(wú)人飛行器航跡規(guī)劃問(wèn)題不僅包括航跡預(yù)規(guī)劃,而且需要帶有一定的實(shí)時(shí)性,即在線航跡規(guī)劃或動(dòng)態(tài)實(shí)時(shí)航跡規(guī)劃。
許多學(xué)者在離線航跡規(guī)劃方面作了大量的工作,采用了許多智能搜索算法,如A*算法、遺傳算法、蟻群算法等。盡管大量文獻(xiàn)已經(jīng)指出設(shè)計(jì)開(kāi)發(fā)無(wú)人飛行器在線實(shí)時(shí)航跡規(guī)劃算法的重要價(jià)值,但見(jiàn)之文獻(xiàn)的相對(duì)于離線航跡規(guī)劃卻少很多,主要研究如下[5-7]:
國(guó)內(nèi),空軍工程大學(xué)孫彪采用連續(xù)型粒子群優(yōu)化(PSO)算法進(jìn)行無(wú)人機(jī)參考航跡的實(shí)時(shí)規(guī)劃,以最大轉(zhuǎn)彎半徑、步進(jìn)、最短距離和回避威脅作為適應(yīng)度函數(shù)的評(píng)價(jià)指標(biāo),得到代表最優(yōu)航跡的離散點(diǎn)。仿真結(jié)果表明該方法收斂時(shí)間短,占用內(nèi)存少,可以滿足在線實(shí)時(shí)航跡規(guī)劃的要求。丁曉東提出了一種基于RCS的無(wú)人機(jī)航跡實(shí)時(shí)規(guī)劃方法,并采用多階段分析博弈評(píng)估算法對(duì)航跡進(jìn)行優(yōu)化。仿真結(jié)果表明,該方法能夠比較好地解決無(wú)人機(jī)的航跡規(guī)劃問(wèn)題。李士波提出了一種基于實(shí)時(shí)A*搜索的無(wú)人機(jī)實(shí)時(shí)航跡規(guī)劃算法,該算法將飛行器運(yùn)動(dòng)與航跡搜索相結(jié)合,在飛行器飛行過(guò)程中實(shí)時(shí)規(guī)劃出下一段航跡;在搜索過(guò)程中,使用了多步尋優(yōu)搜索的方法,相比單步搜索生成的航跡更加優(yōu)化;使用最小轉(zhuǎn)彎半徑對(duì)生成的折線進(jìn)行連接,使路徑平滑可飛;針對(duì)算法局限性,給出一種改進(jìn)局部最優(yōu)點(diǎn)的策略。該算法能夠較好地滿足規(guī)劃要求。北京航空航天大學(xué)曾佳提出了一種滿足時(shí)序約束的無(wú)人機(jī)在線協(xié)同航跡規(guī)劃方法。首先采用按時(shí)間推進(jìn)的協(xié)同規(guī)劃?rùn)C(jī)制,解決了在線協(xié)同規(guī)劃中信息交互存在時(shí)間間隔的問(wèn)題;其次通過(guò)設(shè)計(jì)協(xié)同函數(shù),采用自主分布計(jì)算協(xié)同變量的方法解決其時(shí)序問(wèn)題。仿真選取同時(shí)到達(dá)和按等時(shí)間間隔到達(dá)兩類(lèi)典型時(shí)序問(wèn)題,結(jié)果表明該方法可以快速生成符合協(xié)同時(shí)序要求的協(xié)同航跡。解放軍炮兵學(xué)院倪敏在對(duì)傳統(tǒng)算法進(jìn)行改進(jìn)的基礎(chǔ)上,提出運(yùn)用支持向量機(jī)的思想,建立航跡回歸模型。其建模速度快,計(jì)算時(shí)間少,可擴(kuò)充性強(qiáng),能及時(shí)為無(wú)人機(jī)在未知環(huán)境中提供實(shí)時(shí)航線圖。西北工業(yè)大學(xué)田雪濤給出了基于混合整數(shù)線性規(guī)劃技術(shù)在模型預(yù)測(cè)控制框架下進(jìn)行無(wú)人機(jī)實(shí)時(shí)航跡規(guī)劃的方法。該方法通過(guò)將威脅區(qū)、速度、加速度以及威脅規(guī)避等約束條件轉(zhuǎn)化為能夠直接應(yīng)用在M ILP中的形式,并結(jié)合模型預(yù)測(cè)控制方法來(lái)進(jìn)行規(guī)劃以滿足實(shí)時(shí)性要求。肖秦琨針對(duì)威脅可變及威脅體不盡相同的無(wú)人機(jī)路徑規(guī)劃問(wèn)題提出了一種局部路徑重規(guī)劃的算法。算法中,威脅體威脅等級(jí)隨無(wú)人戰(zhàn)斗機(jī)飛行不斷變化,無(wú)人戰(zhàn)斗機(jī)通過(guò)多傳感器數(shù)據(jù)融合知識(shí)構(gòu)建動(dòng)態(tài)貝葉斯網(wǎng)絡(luò)圖,獲取環(huán)境信息,應(yīng)用V iterbi解碼算法獲得實(shí)時(shí)威脅等級(jí),進(jìn)行局部改進(jìn)型Voronoi圖的重構(gòu),以完成局部路徑重規(guī)劃,提高了無(wú)人戰(zhàn)斗機(jī)在實(shí)戰(zhàn)環(huán)境下生存概率。南京航空航天大學(xué)安柏義利用Dynapath(動(dòng)態(tài)路徑)算法進(jìn)行參考航線優(yōu)化,根據(jù)局部地形、地貌、障礙、威脅等信息以及飛機(jī)機(jī)動(dòng)性能的限制,實(shí)時(shí)計(jì)算出飛行航跡,仿真結(jié)果表明該方法可以比較理想地進(jìn)行航跡點(diǎn)的處理,得到較好的航跡。
國(guó)外,K im提出在敵方環(huán)境下運(yùn)用有限的信息進(jìn)行全自主無(wú)人機(jī)的實(shí)時(shí)航跡規(guī)劃方法,該方法包括兩個(gè)算法,第一個(gè)算法僅考慮非常有限的信息,僅包括無(wú)人機(jī)當(dāng)前所處位置的可能存在的威脅;而第二個(gè)算法則需利用更多的信息,包括無(wú)人機(jī)所感知的威脅強(qiáng)度及位置等。兩個(gè)算法產(chǎn)生一系列安全的路徑節(jié)點(diǎn),其風(fēng)險(xiǎn)值低于規(guī)定的風(fēng)險(xiǎn)閾值。Kam rani采用序列蒙特卡羅仿真對(duì)執(zhí)行監(jiān)測(cè)任務(wù)的無(wú)人機(jī)進(jìn)行路徑規(guī)劃。但要求提供足夠多的關(guān)于目標(biāo)和環(huán)境的先驗(yàn)信息,才可以通過(guò)序列蒙特卡羅仿真對(duì)目標(biāo)的未來(lái)狀態(tài)進(jìn)行評(píng)估。Jennings考慮存在隨機(jī)風(fēng)場(chǎng)影響下無(wú)人機(jī)航跡,受風(fēng)場(chǎng)影響無(wú)人機(jī)偏離了預(yù)規(guī)劃航跡,通過(guò)動(dòng)態(tài)規(guī)劃法在線插補(bǔ)新的路徑節(jié)點(diǎn),由于動(dòng)態(tài)規(guī)劃算法的內(nèi)在啟發(fā)性限制了可選航跡數(shù)量,因此,算法在非常快的計(jì)算時(shí)間內(nèi)就提供近似最優(yōu)的航跡。Yang首先使用快速擴(kuò)展隨機(jī)樹(shù)生成防碰路徑,該路徑由多條直線段連接而成,因此無(wú)人機(jī)無(wú)法按此飛行,然后采用三次Bezier螺旋曲線的G2連續(xù)路徑算法,將直線用曲線替代,仿真結(jié)果表明,該算法較Dubins路徑及C1連續(xù)三次Bezier螺旋曲線具有更好的效果。Bernhard Weiβ針對(duì)未知環(huán)境提出一種無(wú)人機(jī)動(dòng)態(tài)規(guī)劃算法,無(wú)人機(jī)飛行航跡由一組可修剪軌跡組成,首先通過(guò)當(dāng)代迭代算法確定了下一代的最佳修剪軌跡,以便降低代價(jià)函數(shù)值,并通過(guò)改變權(quán)值,使總的航跡代價(jià)最小,最后通過(guò)Dijkstra算法獲得全局最佳路徑。Ducard在未知環(huán)境下,降低無(wú)人機(jī)性能過(guò)程中,對(duì)無(wú)人飛行器航跡實(shí)時(shí)重規(guī)劃,從而達(dá)到規(guī)避障礙等目的。嚴(yán)格地說(shuō),該研究提出的是無(wú)人飛行器動(dòng)態(tài)導(dǎo)航算法。
綜上所述,可用于無(wú)人飛行器實(shí)時(shí)航跡的算法目前主要有:實(shí)時(shí)A*算法、實(shí)時(shí)Dynapath算法、連續(xù)型粒子群優(yōu)化、支持向量機(jī)(動(dòng)態(tài)路徑)、三次Bezier螺旋曲線、Voronoi圖等。這些算法除Voronoi圖外,其余均基于柵格法,但都存在隨著周遭威脅環(huán)境復(fù)雜度的增加、計(jì)算時(shí)間也急劇增加的缺點(diǎn)。更重要的是,它們都是以實(shí)現(xiàn)代價(jià)最小為目標(biāo)的路徑規(guī)劃,很少考慮到無(wú)人飛行器因動(dòng)力學(xué)條件約束生成航跡的不可飛性。以上算法對(duì)于這種受無(wú)人飛行器自身狀態(tài)約束的航跡優(yōu)化問(wèn)題,處理起來(lái)并不容易。通常的解決方法是通過(guò)航跡平滑、航跡跟蹤技術(shù),對(duì)算法生成的航跡進(jìn)行處理以得到實(shí)際可飛航跡,但這卻會(huì)損失實(shí)時(shí)性。
5 結(jié)束語(yǔ)
無(wú)人飛行器在線航跡規(guī)劃的時(shí)效性要求很高,目前還存在以下問(wèn)題:a)過(guò)于簡(jiǎn)化無(wú)人飛行器約束。對(duì)無(wú)人飛行器動(dòng)力學(xué)約束的考慮過(guò)于簡(jiǎn)單,造成由此規(guī)劃的航跡往往實(shí)際不可飛。b)時(shí)效性要求達(dá)不到。雖然近年來(lái)許多文獻(xiàn)提出航跡規(guī)劃的動(dòng)態(tài)優(yōu)化方法,但未考慮實(shí)戰(zhàn)環(huán)境下威脅性不斷變化的情況。在實(shí)時(shí)航跡規(guī)劃中,偵察環(huán)境數(shù)據(jù)常常會(huì)實(shí)時(shí)發(fā)生改變,動(dòng)態(tài)規(guī)劃算法在每次參數(shù)發(fā)生改變時(shí),必須重新代入模型進(jìn)行運(yùn)算,計(jì)算時(shí)間過(guò)長(zhǎng),而達(dá)不到及時(shí)規(guī)避威脅的要求。c)算法模型的失效。無(wú)人飛行器航跡規(guī)劃需要的信息是高維和海量的,而動(dòng)態(tài)規(guī)劃具有“維數(shù)爆炸”特性,這使得在進(jìn)行算法設(shè)計(jì)時(shí),簡(jiǎn)化因素較多、誤差較大,建立的模型并不能反映真實(shí)的環(huán)境,得出的航跡規(guī)劃不能滿足任務(wù)要求。
未來(lái)在無(wú)人飛行器在線航跡規(guī)劃的發(fā)展方向及研究重點(diǎn)主要有:a)開(kāi)發(fā)高效的在線規(guī)劃算法。要求算法尋優(yōu)能力強(qiáng),收斂速度快。需要結(jié)合不同算法的優(yōu)勢(shì),提出混合算法,以提高算法的時(shí)效性。b)多機(jī)在線協(xié)同航跡規(guī)劃。為了提高無(wú)人飛行器的作戰(zhàn)能力,將具有不同能力的無(wú)人飛行器組成網(wǎng)絡(luò)化無(wú)人飛行器群顯得非常重要。因此,需要研究無(wú)人飛行器群在線協(xié)同航跡規(guī)劃,以實(shí)現(xiàn)任務(wù)重分配、網(wǎng)絡(luò)重組、威脅規(guī)避及在線自主多機(jī)協(xié)同作戰(zhàn)的功能。■
[1] 高暉,陳欣,夏云程.無(wú)人機(jī)航路規(guī)劃研究[J].南京航空航天大學(xué)學(xué)報(bào),2001,33(2):135-138.
[2] 高曉光,楊有龍.基于不同威脅體的無(wú)人作戰(zhàn)飛機(jī)初始路徑規(guī)劃[J].航空學(xué)報(bào),2003,24(5):435-438.
[3] A l-Hasan S,Vachtsevanos G.Intelligent route planning for fast autonomous vehicles operating in a large natural terrain[J].Robotics and Autonomous Systems,2002,40:1-24.
[4] 葉媛媛,閔春平,沈林成,等.基于VORONOI圖的無(wú)人機(jī)空域任務(wù)規(guī)劃方法[J].系統(tǒng)仿真學(xué)報(bào),2005,17(6).
[5] 丁曉東,劉毅,李為民.基于動(dòng)態(tài)RCS的無(wú)人機(jī)航跡實(shí)時(shí)規(guī)劃方法研究[J].系統(tǒng)工程與電子技術(shù),2008,30(5):868-871.
[6] 曾佳,申功璋,楊凌宇.無(wú)人機(jī)在線協(xié)同航跡規(guī)劃時(shí)序問(wèn)題[J].南京航空航天大學(xué)學(xué)報(bào),2009,41(3):334-338.
[7] 田雪濤,席慶彪.基于混合整數(shù)線性規(guī)劃無(wú)人機(jī)實(shí)時(shí)航跡規(guī)劃[J].計(jì)算機(jī)仿真,2009,26(5):72-75.
猜你喜歡
房地產(chǎn)導(dǎo)刊(2021年6期)2021-07-22 09:12:46
中國(guó)石油石化(2021年9期)2021-07-17 09:24:00
中國(guó)農(nóng)民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術(shù)與機(jī)床(2017年3期)2017-06-23 08:11:34
中國(guó)衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
