采用現(xiàn)在點(diǎn)射擊方式的反艦導(dǎo)彈捕捉概率計算模型
2010-03-24 02:40:04陳鈺寧曾家有鐘陽春
海軍航空大學(xué)學(xué)報 2010年2期
陳鈺寧,曾家有,鐘陽春
(海軍航空工程學(xué)院 a.研究生管理大隊(duì);b.指揮系;c.科研部,山東 煙臺 264001)
隨著射程的增大,反艦導(dǎo)彈逐步趨向于采用現(xiàn)在點(diǎn)射擊。采用現(xiàn)在點(diǎn)射擊方式的反艦導(dǎo)彈,依賴目標(biāo)指示,計算射擊諸元時,不計算導(dǎo)彈自控飛行時間內(nèi)目標(biāo)的運(yùn)動,不需要測定目標(biāo)運(yùn)動要素,瞄準(zhǔn)目標(biāo)的現(xiàn)在位置射擊[1],這顯然與計算射擊諸元時需要目標(biāo)運(yùn)動參數(shù)的前置點(diǎn)射擊方式不同。由于采用現(xiàn)在點(diǎn)射擊方式反艦導(dǎo)彈的特殊性,計算捕捉概率時,必須要考慮自控終點(diǎn)散布、目標(biāo)機(jī)動范圍、目標(biāo)指示精度等誤差條件的影響。由于不知道目標(biāo)的運(yùn)動要素,本文把目標(biāo)機(jī)動范圍、目標(biāo)指示精度誤差作為圓分布處理,建立了不同誤差條件下的現(xiàn)在點(diǎn)射擊方式反艦導(dǎo)彈捕捉概率計算模型。
1 基本假設(shè)
2 模型建立
反艦導(dǎo)彈捕捉概率是指導(dǎo)引頭開機(jī)后能夠捕捉到目標(biāo)的可能性,即目標(biāo)落入雷達(dá)捕捉帶內(nèi)并被雷達(dá)捕捉到的概率。現(xiàn)代導(dǎo)彈導(dǎo)引頭通常只要搜索區(qū)覆蓋到目標(biāo),就能夠檢測到目標(biāo)。因此,捕捉概率就等于導(dǎo)彈搜索區(qū)覆蓋目標(biāo)的概率[2-3]。由于反艦導(dǎo)彈的導(dǎo)引頭多為單平面雷達(dá),其俯仰覆蓋概率和距離捕捉概率可近似為1,捕捉概率就近似等于導(dǎo)彈方位搜索區(qū)覆蓋目標(biāo)的概率[4-5]。
2.1 目標(biāo)機(jī)動條件下
面臨威脅時,目標(biāo)進(jìn)行機(jī)動是必然的。如圖1所示,導(dǎo)彈從發(fā)射點(diǎn)M發(fā)射,到導(dǎo)引頭開機(jī)點(diǎn)W開機(jī)搜索,將目標(biāo)的最大機(jī)動范圍看作半徑為Rjd的圓。圓落在搜索扇面內(nèi)的面積為弧線AB、直線BC、弧線CD與直線DA圍成的面積。

圖1 目標(biāo)機(jī)動范圍在搜索扇面內(nèi)的面積示意圖
目標(biāo)機(jī)動時間 tjd等于反艦導(dǎo)彈從發(fā)射點(diǎn)M 到開機(jī)點(diǎn)W的自控飛行時間加上導(dǎo)引頭半個方位搜索周期時間之和[6]。則:

為便于計算,先求β。顯然,0°<β<90°,有

目標(biāo)機(jī)動范圍是半徑為Rjd的圓,有

目標(biāo)機(jī)動范圍形成的圓與導(dǎo)引頭搜索范圍相交部分的面積 SABCD,是能夠被導(dǎo)引頭搜索扇面覆蓋到的范圍,沒有被覆蓋到的面積為。有

捕捉概率 Pbz可由導(dǎo)引頭搜索扇面覆蓋到的面積 SABCD與目標(biāo)機(jī)動范圍形成的圓面積 Sy之間的比值得到,則

2.2 目標(biāo)指示精度誤差條件下
反艦導(dǎo)彈飛行中影響捕捉概率的主要因素有:自控終點(diǎn)散布精度誤差,常值橫風(fēng)產(chǎn)生的誤差,目標(biāo)機(jī)動產(chǎn)生的誤差,目標(biāo)引導(dǎo)誤差,目標(biāo)信息遲滯引起的誤差[7-8]。本文把目標(biāo)引導(dǎo)誤差、目標(biāo)信息遲滯引起的誤差綜合為目標(biāo)指示精度誤差,把自控終點(diǎn)散布誤差、常值橫風(fēng)產(chǎn)生的誤差綜合為側(cè)向偏移。
采用現(xiàn)在點(diǎn)射擊方式的反艦導(dǎo)彈,因攻擊距離比較遠(yuǎn),通常是超視距射擊,依賴其他平臺傳送或引導(dǎo)目標(biāo)信息。由于測量和時延的存在,也必然存在目標(biāo)指示精度誤差 Ezs。考慮目標(biāo)指示精度誤差時,目標(biāo)位置在導(dǎo)引頭開機(jī)搜索時的散布范圍,應(yīng)是目標(biāo)指示精度誤差位置范圍與機(jī)動范圍的疊加圓,即半徑為Ezs與 Rjd之和的圓。此時,捕捉概率計算模型為

2.3 側(cè)向偏移條件下
導(dǎo)彈在自控段飛行,由自動駕駛儀或慣導(dǎo)系統(tǒng)控制姿態(tài)。由于控制精度和常值風(fēng)的影響,側(cè)向偏移 Rpy也是必然存在的。以向左偏移為例,如圖2所示,WW1=WW2=Rpy,導(dǎo)引頭在W1點(diǎn)開機(jī),方位搜索范圍為直線 W1F1、W1F2形成的扇面。
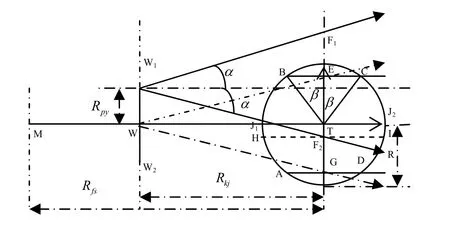
圖2 兩類誤差同時存在時目標(biāo)機(jī)動范圍在搜索扇面內(nèi)的面積示意圖
此時,目標(biāo)位置范圍落在搜索扇面內(nèi)的面積可等效為直線HI 與弧線HBCI 圍成的面積,其面積SHBCI等于半圓面積加上 SHJ1J2I的面積。若出現(xiàn)TF2>R 情況,則搜索扇面的另一邊界進(jìn)入到園內(nèi),相當(dāng)于示意圖換了個方向,這里約定TF2≤R。則捕捉概率計算模型為

3 算例

表1 Rfs=160km,α=25時反艦導(dǎo)彈的捕捉概率

表2 Rfs=240km,α=35時反艦導(dǎo)彈的捕捉概率
4 結(jié)論
由表1~2可知,發(fā)射距離及兩類誤差對反艦導(dǎo)彈的捕捉概率有明顯影響。捕捉概率隨著 Rfs、Rpy、Ezs的增大而減小;當(dāng) Rfs增大時,要求α對應(yīng)增大。按照捕捉概率不小于0.99的標(biāo)準(zhǔn)[7-9],對高亞聲速反艦導(dǎo)彈幾個參數(shù)的要求歸納如下:
1)Rfs達(dá)到160 km時,α應(yīng)不小于25o;若α=25o,當(dāng) Rpy達(dá)到4.0 km,Ezs必須在6 km以內(nèi);
2)Rfs達(dá)到240 km時,α應(yīng)不小于35o;若α=35o,當(dāng) Rpy達(dá)到5.0 km,Ezs必須在9 km以內(nèi)。
本文研究沒有考慮發(fā)射平臺定位誤差的影響,對機(jī)動發(fā)射平臺的導(dǎo)彈,結(jié)果可能存在一定的偏差。
[1]曠志高,顏仲新,劉鼎臣.超視距反艦導(dǎo)彈的射擊方式探討[J].飛航導(dǎo)彈.2003(7):14-17.
[2]陳超,沙基昌,余濱,等.反艦導(dǎo)彈兩種射擊方式下捕捉概率及仿真[J].火力與指揮控制,2007,32(6):45-46.
[3]李云峰,姚奕,路德信.某潛艦導(dǎo)彈在兩種射擊方式下捕捉概率研究[J].火力與指揮控制,2003,28(增刊):103-105.
[4]王林,李守秀.反艦導(dǎo)彈導(dǎo)引頭捕捉概率的分析計算方法研究[J].戰(zhàn)術(shù)導(dǎo)彈技術(shù),2007(3):12-15.
[5]徐建志.反艦導(dǎo)彈捕捉能力建模與仿真[J].系統(tǒng)仿真學(xué)報,2008,20(4):874-877.
[6]曾家有,張勇.確定反艦導(dǎo)彈末制導(dǎo)雷達(dá)最佳開機(jī)距離的模型研究[J].戰(zhàn)術(shù)導(dǎo)彈技術(shù),2008(3):62-65.
[7]趙輝,沈閩鋒,許士海.反艦導(dǎo)彈超視距攻擊捕捉概率模型研究[J].艦船電子工程,2008,28(1):56-57.
[8]汪新剛.反艦導(dǎo)彈目標(biāo)捕捉概率模型分析[J].戰(zhàn)術(shù)導(dǎo)彈控制技術(shù),2006(3):104-106.
[9]龍飛,張林,劉鼎臣.目標(biāo)規(guī)避條件下反艦導(dǎo)彈捕捉概率的計算方法[J].戰(zhàn)術(shù)導(dǎo)彈技術(shù),2005(6):19-20.
