潛艇機動規避主動定向聲納浮標方法研究*
2010-04-26 05:08:28紀金耀樓曉平
艦船電子工程 2010年12期
關鍵詞:區域
紀金耀 薛 濤 樓曉平
(海軍潛艇學院 青島 266071)
1 引言
近年來,國內外對航空探潛的建模與仿真開展了大量的研究工作,取得了一定的成果[1~2]。聲納浮標是反潛飛機和部分反潛直升機搜索、探測和跟蹤水下潛艇的主要器材。從工作方式上可分為被動式和主動式兩大類[3]。由于被動聲納浮標屬于隱蔽性對潛觀察器材,通常情況下,處于水下的潛艇無法感知其對潛搜索、探測及跟蹤的征候,因而對被動浮標搜索往往無從進行規避或對抗。而主動聲納浮標屬于暴露性探測器材,易被潛艇所感知。機載監視設備通過無線電超高頻指令控制浮標,并接收主動聲納浮標對水下目標主動測距、測向及多普勒信息[4]。主動聲納浮標可以實現對潛艇的精確定位,直接為對潛攻擊提供確定的位置信息,因而對潛艇的威脅常常是致命的[5]。所以,分析研究潛艇機動規避主動聲納浮標方法,對于提高潛艇在作戰中的生存能力具有重要意義。
根據不同的海洋戰場環境、兵力態勢、浮標數量的多少和浮標陣布設時機等因素可以布設不同的陣形,所以,主動定向聲納浮標的布陣方式可以是多種多樣的。在此,我們僅針對常用的三枚和四枚主動浮標陣形為例,分析潛艇機動規避的方法。
2 主動定向聲納浮標對潛跟蹤定位方法
反潛飛機在應召搜索潛艇或發現潛艇之后以及使用武器之前,往往采用主動定向聲納浮標對潛艇實施跟蹤和定位。主動定向聲納浮標既能測定浮標與潛艇之間的距離,又能測出方位。因此,使用主動定向浮標跟蹤潛艇時,只需要一枚浮標保持與潛艇接觸就能對目標進行定位。為了達成對潛攻擊的要求,通常情況下需要使用三枚或四枚主動定向聲納浮標,根據潛艇可能散布區域的大小布設成一定的陣形,以便控制一定的區域范圍并實現定位。
2.1 三枚主動聲納浮標陣的布設陣形與布設方法
布設陣形與時機有很大的關系,布設三枚主動聲納浮標的時機主要有:1)針對小區域實施布設。由于主動定向聲納浮標作用距離往往較小,并且在最后攻擊階段要求定位誤差盡可能小,所以,主動定向聲納浮標往往專用于小區域對潛定位跟蹤。2)延遲時間在5min以內。當反潛飛機通過雷達或目視得到的潛艇概位(基準點),同時潛艇通過雷達偵察儀或潛望鏡發現反潛飛機后立即下潛規避,為了能夠在較小區域內發現水下潛艇,延遲時間往往要求比較短,因此通常情況要求延遲時間在5min以內。
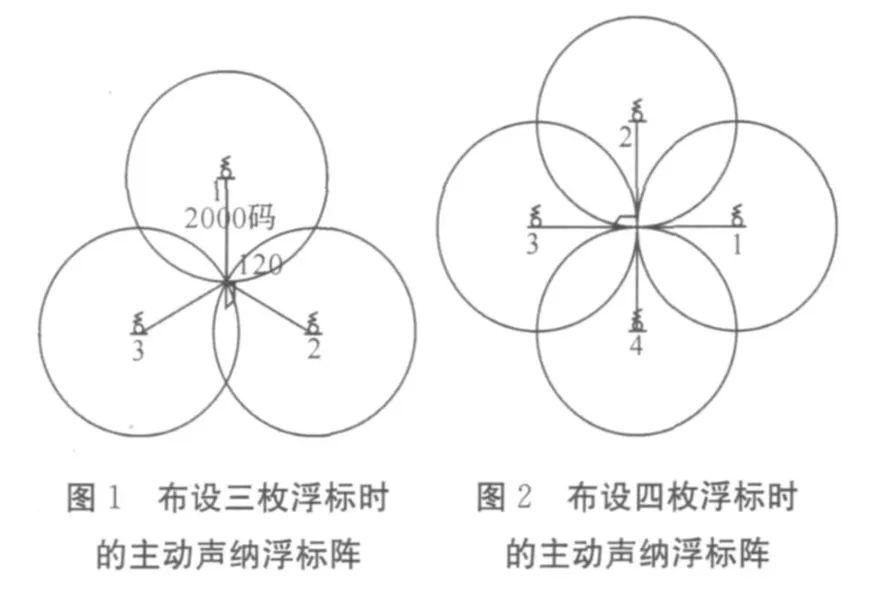
具體布設時,以潛艇概位(基準點)為中心、2000碼(1829m)或當日主動聲納浮標偵測距離為半徑的圓周上,成等邊三角形的態勢布設3枚浮標,構成一個聲納浮標圓形陣,如圖1所示。布設時,首先在潛艇的概略航向上布設一枚浮標,然后依次布設其他兩枚浮標,最后飛到潛艇概位點或疑似潛艇位置區上空進行監聽。
2.2 四枚主動聲納浮標陣的布設陣形與布設方法
四枚主動聲納浮標布設的一般適用時機為:1)當使用布設三枚浮標時的主動聲納浮標陣無法有效定位潛艇時。2)通過雷達或目視得到的潛艇概位(基準點)或者當反潛飛機進行應召搜索時,反潛飛機抵達基準點上空的遲到時間在10min以內。
具體布陣為:在以潛艇概位(基準點)為中心、4000碼(3658m)為半徑的圓周上,每間隔90°布設l枚主動聲納浮標,構成聲納浮標圓形陣。該陣形要求單枚主動聲納浮標的當日偵測距離大于2000碼(1829m),以使各浮標的搜索區域有一定程度的重疊。如圖2所示。具體布設過程類似于三枚聲納浮標陣的布設。
3 潛艇規避主動聲納浮標陣的仿真計算
為了更好地分析研究潛艇機動規避主動聲納浮標陣的探測跟蹤,我們借助于Window s平臺,采用編程工具Visual C++6.0,對主動聲納浮標的探測區域進行模擬仿真。通過模擬仿真,計算出潛艇規避聲納浮標陣探測的速度和時間,進而得出潛艇機動規避聲納浮標陣跟蹤的一般方法。
3.1 仿真軟件的運行界面
仿真軟件運行界面如圖3所示。
潛艇規避主動聲納浮標陣仿真過程的邏輯描述為:
1)確定聲納浮標陣形和參數;
2)將潛艇的位置、聲納浮標陣的基準點位置、每個聲納浮標的位置轉化為屏幕坐標;
3)根據潛艇規避航向,生成潛艇在規避時的相應態勢;
4)在每一步,實時解算潛艇與每個聲納浮標之間的距離、舷角,結合潛艇規避聲納浮標陣各要素的計算公式進行計算。
5)仿真結束后,輸出計算結果。
3.2 潛艇規避聲納浮標陣各要素的計算
3.2.1 三枚聲納浮標的機動規避計算
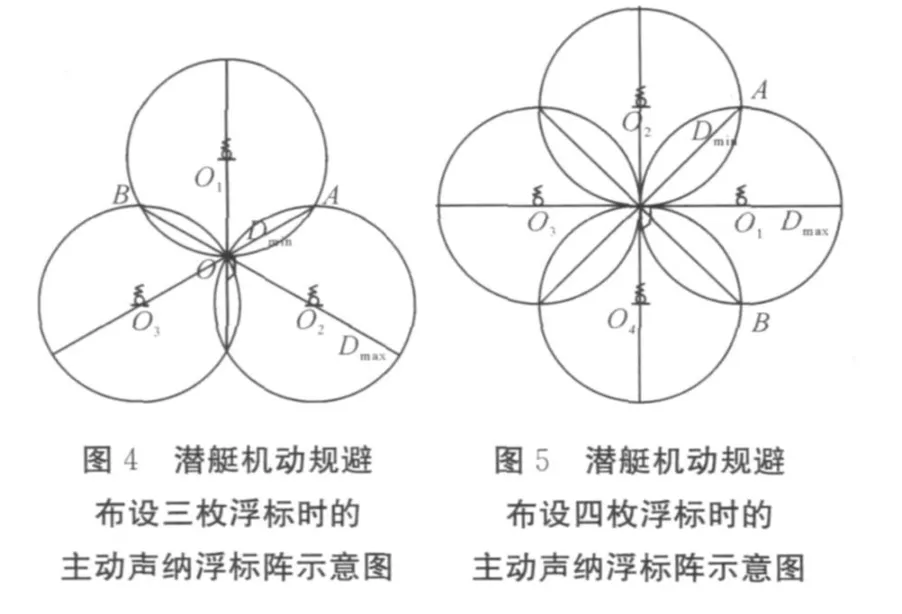
潛艇機動規避布設三枚浮標時的主動聲納浮標陣示意圖如圖4所示。
潛艇駛出主動聲納浮標陣作用區域所經過的最小距離Dmin由下式計算:

式中:MDR為主動聲納浮標偵測距離。
潛艇駛出主動聲納浮標陣作用區域所經過的最大距離Dmax由下式計算:

潛艇規避航向上航行時間Tgb由下式計算:

圖3 仿真軟件運行界面

式中:O1O2、O2O3、O3O1為主動聲納浮標之間的距離;Vbs為反潛飛機布設主動聲納浮標時的速度;Tjt為反潛飛機從布設完主動聲納浮標陣至飛至聽測空域的時間。
潛艇走出主動聲納浮標陣的規避速度Vqgb由下式計算:

3.2.2 四枚聲納浮標的機動規避計算
潛艇機動規避布設四枚浮標時的主動聲納浮標陣示意圖如圖5所示。
潛艇駛出主動聲納浮標陣作用區域所經過的最小距離Dmin由下式計算:

式中:MDR為主動聲納浮標偵測距離。
潛艇駛出主動聲納浮標陣作用區域所經過的最大距離Dmax由下式計算:
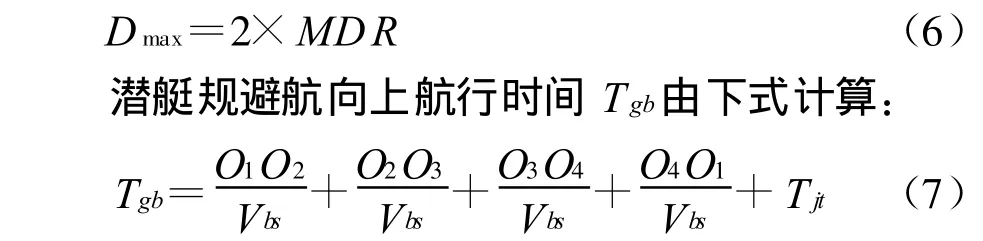
式中 :O1O2、O2O3、O3O4、O4O1為主動聲納浮標之間的距離;Vbs為反潛飛機布設主動聲納浮標時的速度;Tjt為反潛飛機從布設完主動聲納浮標陣至飛至聽測空域的時間。
潛艇走出主動聲納浮標陣的規避速度Vqgb由下式計算:

4 計算結果與分析
主動定向聲納浮標通過發射和接收主動聲納脈沖信號來測定目標與浮標間的距離,水下潛艇在聽測到主動聲納浮標聲脈沖信號時(意味著將被攻擊),可以根據主動浮標的使用特點和信號特征識別出主動聲納浮標的探測,并可以通過各主動聲納浮標的聲納方位判斷出大致的態勢,合理利用當時情況下的水文條件,采取適合的規避措施,以擺脫主動聲納浮標對本艇的探測、跟蹤,減少被攻擊的可能性或降低被反潛武器毀傷的概率。
4.1 計算結果
假設反潛飛機以220km/h的速度依次布設主動聲納浮標,第一枚布設在潛艇的概略航向線前方。潛艇聲納突然聽測到航向線附近有聲納浮標落水噪音或聲納浮標脈沖信號。
據此,利用仿真計算可得出不同主動聲納浮標偵測距離MDR(單位nm)時,最小浮標陣偵測距離Dmin(單位 nm),最大浮標陣偵測距離Dmax(單位nm),潛艇規避時間Tgb(單位min),潛艇規避速度Vqgb(單位kn)。
基于聲波在水中直線傳播距離往往比較近,在此,我們僅針對MDR 分別為1nm、2nm、3nm、4nm的情況進行仿真計算。三枚、四枚主動聲納浮標布陣時各要素結果分別見表1,表2。
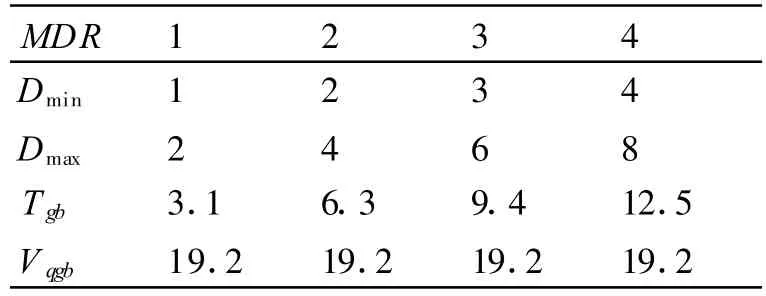
表1 潛艇規避三枚主動聲納浮標陣時各要素的結果
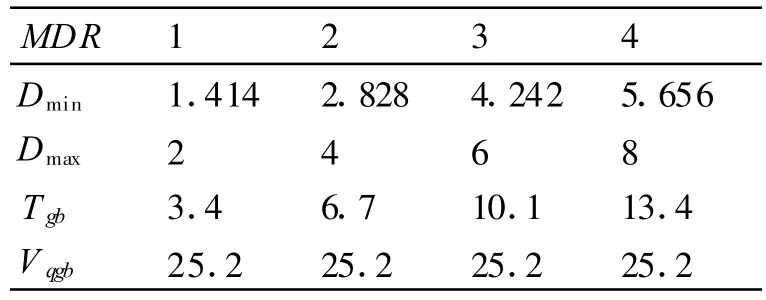
表2 潛艇規避四枚主動聲納浮標陣時各要素的結果
4.2 分析與結論
4.2.1 各要素計算結果的分析
1)聲納浮標探測區域分析
由表1、表2及圖 4、圖 5可見,兩種陣形的聲納浮標的最大探測區域所涵蓋的范圍都是平均探測距離的2倍,且都處于基準點與聲納浮標的連線上。而最小探測區域所涵蓋的范圍因陣形不同而有所不同:三枚時,最小探測區域所涵蓋的范圍就是平均探測距離,且偏離于基準點與聲納浮標連線60°的方位上;四枚時,最小探測區域所涵蓋的范圍是平均探測距離的 2倍,且偏離于基準點與聲納浮標連線45°的方位上。
2)規避速度分析
由表1、表2可見,潛艇規避速度取決于潛艇駛出主動聲納浮標陣作用區域的最小距離Dmin和潛艇規避航向上航行時間Tgb。并且不同聲納浮標的平均探測距離下,Dmin與Tgb的比值為一定值。
3)潛艇規避時間分析
由表1、表2可見,潛艇規避聲納浮標陣所需時間與聲納浮標的平均探測距離的大小成正比關系。即主動聲納浮標的平均探測距離越大,潛艇脫離聲納浮標陣所需時間就越長。
4.2.2 結論
根據仿真結果得出潛艇機動規避主動聲納浮標陣的具體行動方法。當潛艇航向線附近發現主動聲納浮標時,根據浮標陣的使用時機判斷可能將會布設的主動聲納浮標陣陣形,立即加速下潛到有利于規避的水層,同時大角度轉向,若判斷是由三枚浮標組成的主動聲納浮標陣,則轉向±60°(如圖4所示,OA、OB航向可最快脫離聲納浮標陣),采用20kn速度航行10min以上,然后改為最大小噪音航速沿規避航向航行。若判斷是由四枚浮標組成的主動聲納浮標陣,則轉向±45°(如圖5所示,OA、OB航向可最快脫離聲納浮標陣),采用25kn速度航行11min以上,然后改為最大小噪音航速沿規避航向航行。顯而易見,20kn和25kn的高速對于常規潛艇(“基洛”級常規動力潛艇最大航速為19kn)而言是不可能達到的,所以,常規潛艇規避該陣形單純采用純機動方法是不可行的,而對于核潛艇而言采用高速時的航行噪聲也必然很大,所以不宜長時間使用高速進行規避,應該適時改為最大小噪音航速進行規避航行。
對于潛艇規避航向上航行時間Tgb的計算是建立在不考慮浮標接受指令激活時間和浮標位置校正時間的假設基礎上。目前較先進的主動定向聲納浮標大都具有指令控制功能,浮標入水后接受指令激活。若布設浮標陣時間增加1min,則由三枚浮標組成的主動聲納浮標陣當偵測距離為2nm時潛艇可以16.4kn的速度進行規避。即在這種條件下布設浮標陣的時間每分鐘約對應2.7kn的規避速度。由四枚浮標組成的主動聲納浮標陣當偵測距離為2nm時潛艇可以22kn的速度進行規避。即在這種條件下布設浮標陣的時間每分鐘約對應3.2kn的規避速度。
5 結語
本文通過仿真的方法得出潛艇在不同陣形中、不同態勢下的最優規避方法。但本文討論的聲納浮標陣僅以常用的三枚和四枚主動浮標陣為例,而在實際跟蹤過程中,反潛飛機可能追加聲納浮標對潛艇實施探測,還可能使用多種聲納浮標或者其他聲納浮標陣型進行探測,以上問題尚待進一步研究。
[1] Martin.Muitiplyingthe effectiveness of helicopter ASW sensors[J].Sen Technology,2006,47(11):33~36
[2]董文洪,樣日杰,田寶國.雙基地航空搜潛建模與仿真[J].測試技術學報,2006,20(4):304~308
[3]孫明太.航空反潛戰術[M].北京:軍事科學出版社,2003
[4]AN/SSQ-62B/C/D/E Directional Command Activated Sonobuoy System(DICASS).[2003-01-03].http://www.fas.org/man/dod-101/sys/ship/weaps/an-ssq-62.htm
[5]高學強,楊日杰,楊春英.潛艇規避主動聲納浮標作戰效能影響研究[J].系統工程與電子技術,2008,30(2):301~304
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15
