某型艦炮隨動系統誤差產生的原因及超差的對策*
2010-04-26 05:08:38曾啟洪
艦船電子工程 2010年12期
關鍵詞:信號
曾啟洪
(92823部隊四中隊 三亞 572021)
1 引言
隨動系統誤差超差是系統控制中出現的一種故障現象,它影響系統控制的準確度及系統的穩定性,影響艦炮的日常使用和射擊效果。了解隨動系統誤差超差的原因,對解決系統超差問題會有較大的幫助。隨動系統誤差超差是我們在修理中經常遇到的故障,它與系統控制的各元部件關系密切,要解決系統誤差超差問題關系復雜。為了完成修理任務,快速排除故障,本文針對某型艦炮隨動系統誤差超差提出了解決的基本思路。
2 某型艦炮隨動系統控制原理
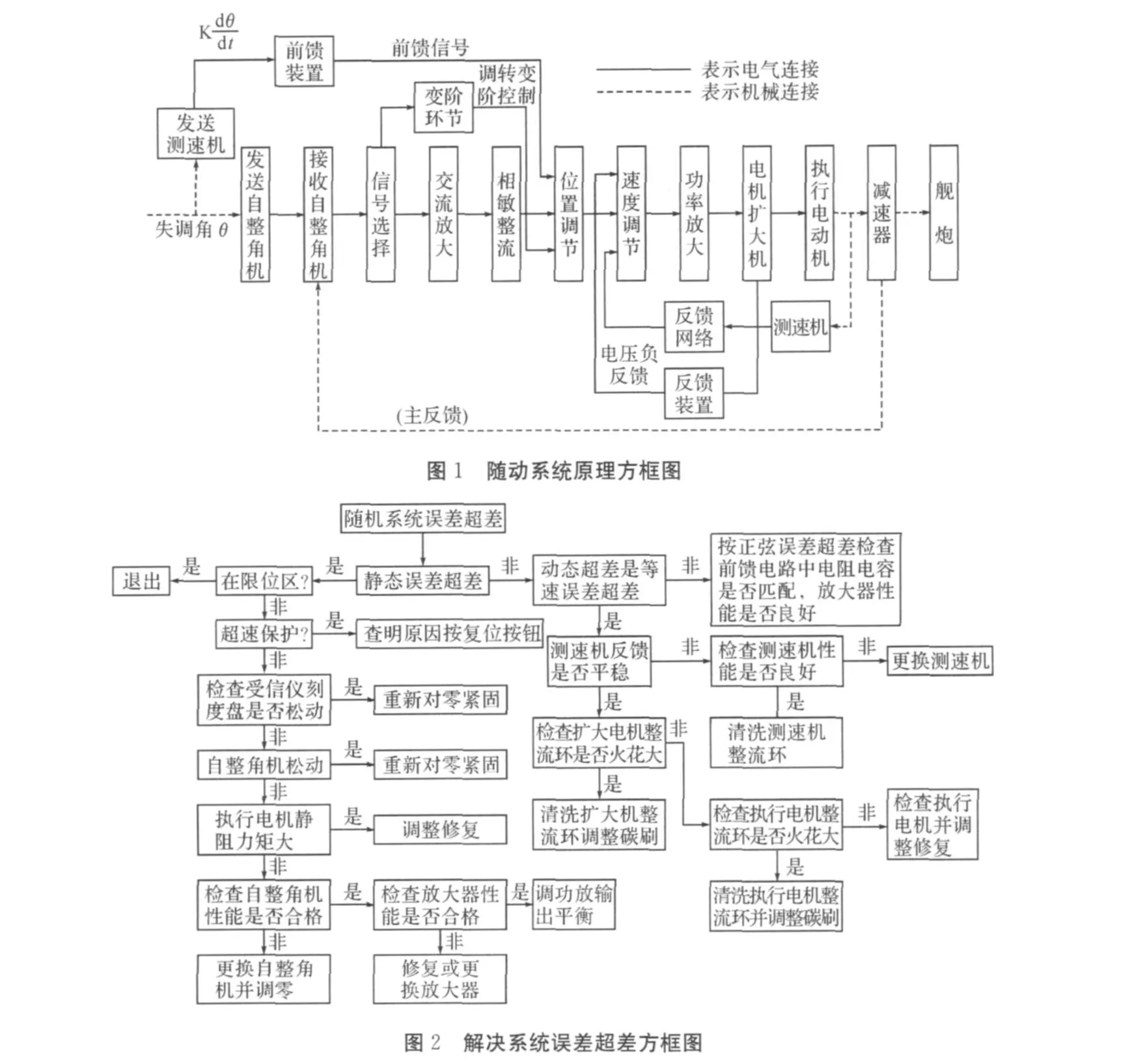
某型艦炮隨動系統是二階無差度的復合控制系統,系統原理方框圖如圖1所示。即當失調角大于100密位時為一階無差度,在失調角較小時(≤100密位時)由于加入了調轉變階線路轉換為二階無差度,因此保證了大失調角時快速協調和小失調角時的精確度[4],其輸入信號有主控信號(失調角)和前饋控制信號,反饋信號有執行電機轉速負反饋和擴大電機的電壓負反饋(電流截止負反饋),即從擴大電機補償繞組端取出電流信號,以負反饋的形式加在電壓調節器輸入端限制主回路電流[2]。假設失調角為θ,指揮儀測速機轉軸的轉速為n1,執行電機的轉速為n2,執行電機電樞電流為Id,自整角機、信號選擇電路、交流放大、相敏整流均對主令信號進行放大,那么放大器輸出信號電壓U0可用以下公式來表示[1]:

其中K1~K6均為系數,可以看出輸出信號電壓U0與失調角θ,指揮儀自整角機轉軸轉速n1和執行電機轉速n2,執行電機電樞電流Id有關,也就是說系統的控制精度與它們有關。
3 產生誤差的原因
隨動系統跟蹤瞄準是由失調角來控制,是通過減小失調角達到協調的目的。因此沒有誤差的隨動系統是不存在的,只不過誤差要控制在適當的范圍內[3]。根據系統運動的穩定狀態,我們可把它分為靜止、勻速、正弦及射擊瞬間四種狀態,下面就以艦炮在這四種狀態運動時的誤差進行討論。
1)靜態誤差,是指艦炮從一個穩定狀態到另一個穩定狀態停止下來,最后所保留的誤差角度;即發送信號的同步機轉子繞組轉過一個固定的角度后,艦炮在系統的帶動下轉到最后停止下來所保留的誤差[1]。因此,靜態誤差與自整角機本身的固定誤差,受信儀的零位誤差,分劃盤刻度與安裝的誤差,晶體管放大器的不平衡輸出及執行電機的靜阻力矩等因素有關。同時,如果同步發送機與接收機之間的三相繞組連接斷開或絕緣不良,以及同步發送機損壞或激磁電壓不正常,那么接收機也不可能正確指示發送機的狀態。
2)等速誤差,艦炮作等速運動跟蹤目標,在穩定跟蹤時所保留的誤差角;即發送信號的同步機作等速運動,艦炮等速跟蹤目標,達到穩定狀態后所保留的誤差角度[1],它與執行電機的轉速成正比,轉速愈高,等速誤差愈大。同時等速誤差與執行電機同軸相連的同步測速發電機的反饋信號有關,與擴大電機電壓負反饋有關。
3)正弦誤差,艦炮作正弦曲線運動跟蹤目標,即發送信號的自整角機同步機轉子以一定周期和振幅作正弦曲線運動,艦炮以相同的周期和振幅進行跟蹤,達到穩定后所保留的誤差角。因此,正弦跟蹤誤差與決定艦炮作正弦曲線運動的最大周期和振幅的元部件有關[5],具體地說,就是指決定運動周期的時間常數的電阻電容有關,與產生前饋信號的發送測速機的最大轉速有關,與放大器的性能有關,它是檢驗系統是否合格的一個重要指標。
4)射擊瞬時誤差,指艦炮與指揮儀達到協調后,艦炮射擊瞬間所保留的誤差角度。即雷達完成目標跟蹤后,傳遞跟蹤信號給指揮儀,指揮儀解算出艦炮跟蹤的不穩定瞄準全角,隨動系統帶動艦炮運轉,在艦炮發射炮彈瞬間系統所保留的誤差角度。因此射擊瞬時誤差與各分系統誤差有關。
4 解決系統誤差超差的方法
要解決系統出現的各種誤差或使用過程中的系統超差問題,可以根據以上對各種誤差產生的原因逐一進行研究找到解決的辦法(解決系統誤差超差的方框圖如圖2),下面就各種誤差解決方法進行具體討論。
1)靜態超差解決方法。
(1)根據產生誤差的原因可以得知,靜態誤差與自整角機本身的性能有關。因此,我們可以通過測量自整角機本身性能來判斷。該受信儀自整角機型號為28ZKB02-S,粗機為1級,精機為0級,其技術參數如表1所示。
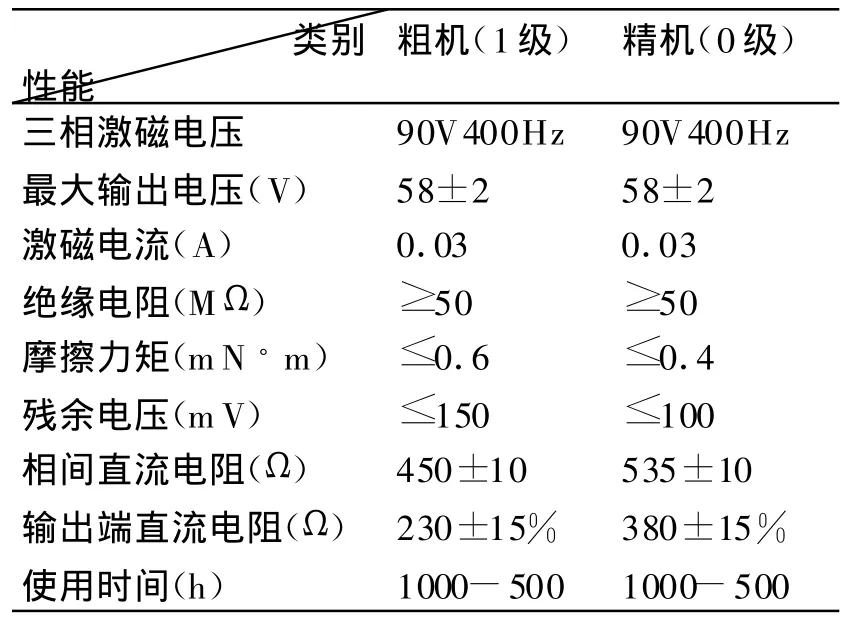
表1 受信儀自整角機技術參數表
根據表中參數,在斷開自整角機的所有電連接情況下,用數字萬用表測量自整角機的三相繞組之間電阻是否平衡和符合阻值,三相繞組之間阻值相差不能大于2Ω。如果不符合阻值或繞組阻值相差大于2Ω,則要更換自整角機;如果符合要求則檢查輸出端直流電阻值是否合乎要求,測量時要轉動轉子軸,阻值要平穩。再者,檢查自整角機本身的絕緣性能是否良好。若以上檢查不符合要求,也要更換自整角機;若符合要求則檢查固定自整角機的螺絲是否緊固,刻度盤是否松動。如果固定自整角機的螺絲沒有上緊,自整角機松動,則恢復電纜連接,要重新調整電氣零位并固緊螺絲,再對正刻度盤零位。然后,檢查同步發送機與接收機三相繞組的連接是否正常,絕緣是否良好;發送機是否良好,發送機激磁電壓是否正常。
(2)在隨動控制柜接通中頻電源的狀態下進行檢查。給發送自整角機提供連續變化的失調角,檢測受信儀轉子輸出是否在0~58V之間連續地平穩變化,如果達不到要求則要更換自整角機。當艦炮與傳信儀(或指揮儀)協調時(即同步狀態)測量受信儀自整角機的輸出電壓,粗機應不大于150mV,精機不大于100mV,且受信儀讀數與傳信儀(或指揮儀)相符。否則需要調整受信儀自整角機的位置,使其輸出電壓符合要求,并調整刻度盤讀數與傳信儀(或指揮儀)讀數相同。如果調整自整角機達不到要求,那么要更換自整角機。
(3)對晶體管放大器要進行零位和輸出平衡檢查。檢查放大器輸出是否正負相等(相差不大于100mV),輸出電壓是否在規定范圍內(約2~3V)。在失調角為零時,檢測相敏、位置、速度、電壓等放大各環節輸出是否能調整為零(不大于5mV),如果某一環節不能調為零,則要檢查該環節的運放性能是否良好,如果運放損壞則要更換;若運放正常,則檢查運放的平衡電容、調零電位器等元件有無損壞或接觸不良。如果各環節輸出都能調為零,則檢查晶體管放大器的功率放大管的工作電壓是否正常,功率放大管有無損壞。如果功率放大管工作電壓不正常,則對工作電壓進行調整或修復;如果功率放大管損壞,則更換功率放大管。
(4)檢查執行電機的靜阻力矩。在艦炮與傳信儀(或指揮儀)協調后,失調角為零,執行電機軸應不轉動。用手擰執行電機軸應不能轉動。測量靜態誤差通常在艦炮與傳信儀(或指揮儀)協調后,用數字萬用表測量受信儀自整角機轉子輸出,受信儀精機輸出應不大于 1.8V,粗機輸出不大于500mV,即誤差不大于1密位,否則不合格,須對照以上檢查,查出原因,排除故障。
2)動態誤差解決方法。在靜態誤差已經合格的情況下才能進行動態誤差檢查。
(1)等速誤差超差的解決方法:根據等速誤差的原因分析,等速誤差與擴大機電壓負反饋及測速電機的負反饋有關;與執行電機的轉速有關。因此,測速電機負反饋和擴大機的電壓負反饋是否平穩對擴大機的輸出會有影響;執行電機的轉速是否平穩,對艦炮跟蹤也會有影響。發現靜態誤差合格而等速誤差不合格時,應當檢查影響執行電機控制電壓穩定和擴大機輸出電壓穩定的部位,具體地說就是檢查執行電機和擴大電機轉子的整流環是否清潔光亮及炭刷接觸是否良好。如果整流環太臟或燒蝕嚴重,則應該用0#砂皮打磨至光亮,用酒精或汽油清潔干凈,并調整碳刷松緊適度按原樣裝回;再者,檢查擴大機電壓負反饋線路是否正常,反饋是否合適。若線路絕緣或接觸不良,則要進行修復;若反饋不合適則要調整電壓反饋電位器。測速發電機的反饋檢查也是一樣,看測速機性能是否合格;反饋電壓是否平穩、正確;測速電機轉子整流環是否清潔光亮、碳刷接觸是否良好,反饋線路絕緣和連接是否良好。同時,檢查執行電機和測速機的激磁電壓是否正常。如果激磁電壓不正常,則要進行調整或修復。然后檢查艦炮的最大調轉速度是否超速,若超速則需調整為合格。等速誤差的檢測通常用指揮儀(或正弦機)作勻速運動跟蹤目標解題帶動隨動系統運轉來檢查,可用示波器監視受信儀精、粗自整角機的轉子輸出電壓變化來判斷誤差是否合格。檢查等速誤差時受信儀自整角機的精機輸出電壓應不大于3.6V,粗機輸出應不大于1V,即誤差不大于2個密位,否則不合格。應按上述檢查,查明原因加以排除。
(2)正弦誤差超差的解決方法:正弦跟蹤誤差的檢查必須在等速誤差合格的情況下進行。根據正弦跟蹤誤差的原因分析,正弦跟蹤誤差是隨動系統帶動艦炮作一定的周期和振幅運動跟蹤目標所產生的誤差。它與放大器響應輸入信號的最大幅度和周期的變化性能有關。因此放大器接受信號的最大周期與幅度必須能與之相匹配,放大器的跟蹤信號變化必須能響應輸入失調角的變化。放大器接收前饋信號輸入電路中的電阻電容應當匹配。可以通過調整放大器接收前饋信號輸入電路中的電阻或電容參數來使系統得到全補償,以提高系統的跟蹤精度。如果調整前饋電路中的電阻電容不能使正弦誤差合格,則要更換放大板或放大器。通常用示波器監視受信儀的粗、精自整角機的信號輸出來檢查正弦誤差電壓,精機最大輸出不大于7.2V,粗機不大于1V為合格,即正弦誤差不大于4個密位,否則不合格,應按上述檢查,查出原因加以解決。
(3)發射瞬間誤差超差的解決方法:在靜態誤差、等速誤差、正弦誤差均合格的條件下,我們通常用射擊考核的方法來檢查射擊瞬時誤差。射擊瞬時誤差的檢測方法與等速誤差、正弦誤差的檢測方法相同,射擊瞬時誤差最大不能超過10個密位。射擊瞬時誤差與雷達誤差、指揮儀誤差,艦炮隨動系統誤差有關。通常我們利用瞄星來校對雷達與艦炮之間的一致性,通過系統聯調來校正雷達、指揮儀、艦炮之間的誤差,使整個系統的誤差最小。
[1]焦自平.1976年式雙37毫米艦炮(電氣部分)[M].北京:海軍裝備修理部出版發行,1990
[2]焦自平,惠寶聚,石軍,等.H/PJ76A雙37毫米艦炮(電氣部分)[M].北京:海軍裝備部艦船技術保障部出版發行,1999
[3]馬宏,王金波.誤差理論與儀器精度[M].北京:兵器工業出版社,2007
[4]孫前來.模糊積分控制在位置隨動系統中的應用[J].太原科技大學學報,2009,30(3):203~207
[5]韓有和,吳飛雪,赫赤,等.正弦機與方位系統特性匹配的探討[J].火炮發射與控制學報,2001(1):11~14
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
