數字微鏡器件動態紅外場景投影技術
2010-05-10 08:10:42陳建華黃德天
中國光學 2010年4期
關鍵詞:系統
陳建華,朱 明,黃德天
(1.中國科學院長春光學精密機械與物理研究所,吉林長春130033;
2.中國科學院研究生院,北京100039)
數字微鏡器件動態紅外場景投影技術
陳建華1,2,朱 明1,黃德天1,2
(1.中國科學院長春光學精密機械與物理研究所,吉林長春130033;
2.中國科學院研究生院,北京100039)
動態紅外場景投影(DIRSP)技術是考察和評估紅外成像測量跟蹤系統性能指標的主要方法。本文回顧了國內外DIRSP技術的發展現狀及應用,概述了幾種主要的DIRSP技術及其特點。在詳細介紹數字微鏡器件(DMD)的工作原理及機械結構的基礎上,總結了灰度等級控制的方法及其特點。通過對3種數字光處理(DLP)顯示系統投影原理的對比,指出了各自的特點和應用場合。重點分析了基于DMD的DIRSP系統—微鏡陣列投影系統(MAPS)的工作原理、系統結構、性能指標及技術優勢,并討論了將DMD應用于DIRSP所采用的6大關鍵技術。最后,結合DIRSP技術的應用背景和國內外研究現狀,對下一步的研究工作做了展望。
數字微鏡器件;數字光處理;動態紅外場景投影;微鏡陣列投影系統
1 引 言
紅外成像制導系統通過其自身攜帶的紅外探測器來探測目標與背景輻射的能量,捕獲目標的紅外圖像,對紅外目標進行識別并跟蹤,以實現精確制導的目的。紅外成像制導特別適合在夜間和低能見度下工作,能提供比肉眼所見更加豐富的目標和背景信息,在惡劣環境中仍具有較強的抗干擾能力,并具有較高的靈敏度和分辨率,十分有利于目標的識別與跟蹤。然而,在紅外成像制導系統開發階段,為了對制導性能進行全面的評價,往往需要大量的外場飛行試驗,消耗大量的經濟與時間成本;同時外場試驗環境也并非人為可控,外場環境不具有可重復性,難以對系統的制導性能進行有針對性的重復試驗。應用紅外硬件閉環(Hardware-in-the-Loop,HWIL)在線實物仿真系統,制導系統的飛行測試與夜視傳感器測試都能在實驗室的仿真環境下進行,大大節約了外場飛行的成本,并能提供可控、可重復的試驗條件。
紅外成像仿真系統的原理是模擬各種真實目標及其背景的紅外輻射特性并建立模型,在紅外光波段內通過仿真系統將其還原,生成的紅外圖像被投影到制導系統的探測器上,使制導系統如同在各種真實環境中進行目標識別與跟蹤[1~4]。
目前,紅外圖像生成方法可以分為三大類:一是可見光圖像直接轉換法,即利用薄膜轉換器直接將可見光圖像轉換成為紅外圖像;二是直接紅外輻射法[5,6],主要包括電阻陣列、激光二極管陣列、紅外陰極射線管(Cathod-ray Tube,CRT)以及MIRAGE(Multispectral InfraRed Animation Generation Equipment)[7];三是紅外輻射調制法[6],主要有數字微鏡器件(Digital Mirror Device,DMD)紅外投影系統、布萊盒(Bly cells)技術和紅外液晶光閥。其中DMD紅外投影技術是基于TI公司研制的DMD而設計的,它具有精度高、幀頻快、分辨率高、動態范圍大等特點,是最新型的動態紅外場景投影技術[8]。
本文介紹了基于DMD的數字光處理(Digital Light Processing,DLP)顯示系統,以及基于DLP投影顯示技術而開發的DIRSP系統—微鏡陣列投影系統(MAPS)的基本原理和關鍵技術,最后對紅外場景投影技術的發展趨勢做了展望。
2 DMD
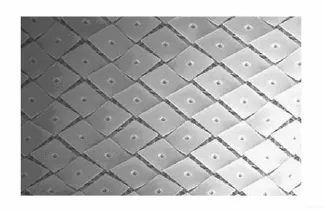
圖1 DMD芯片的反射鏡陣列[10]
2.1 DMD的結構
DMD是采用微機械加工手段,在半導體硅片上采用鋁濺射工藝形成一組二維微鏡陣列,每個微鏡相當于投影畫面中的一個像素點,并且可以獨立控制每個微鏡的狀態,其最高分辨率可達2 048×1 024。圖1是用掃描式電子顯微鏡拍下的DMD微鏡陣列顯微照片,數以百萬計的微鏡面具有不同的偏轉角,呈現不同的狀態。DMD是TI公司研制的DLP顯示系統中空間光調制器的核心器件,每一個微鏡面是邊長為16μm的正方形,微鏡面的中心間距為17μm,每一個微鏡面之間的間隔僅為1μm。利用微鏡與存儲單元之間的靜電吸引,可以控制每個鏡面繞著機械轉軸翻轉+10°或-10°。第二代DMD微鏡面的中心間距僅有13.68μm,可以達±12°的翻轉。而最新一代的 DMD微鏡面的中心間距甚至只有10.8μm[8,9]。中心間距越小,同樣面積的DMD微鏡陣列投影成像的分辨率就越高。圖2示出了兩片位于傾斜狀態的DMD微反射鏡。
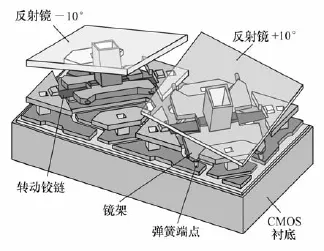
圖2 2個DMD像素圖[10]
由圖2可知,DMD像素單元主要由存儲圖像信號的存儲單元、支撐微鏡的支柱和轉動鉸鏈、鏡架、反射鏡及3個電極等幾大部分組成微機電系統(MEMS)結構單元,圖3為其結構單元的具體展開。
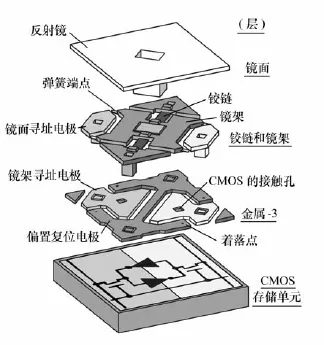
圖3 DMD像素展開圖[11]
2.2 DMD的工作原理
DMD是一種快速、反射式的數字光開關,成像是靠微鏡轉動完成的,成像原理如圖4所示。每個微鏡面都有3種可能的狀態,即“開”態、“平”態以及“關”態,分別對應+10°、0°及-10°的偏轉角。將投影透鏡置于像素微鏡的中垂線上,當微鏡未偏轉(即處于“平”態)時,像素微鏡水平放置,來自光源的入射光被微鏡反射,反射角為20°,偏離投影透鏡;當微鏡偏轉+10°(即處于“開”態)時,反射光線幾乎全部通過投影系統,屏幕上對應的像素即呈現亮態;當微鏡偏轉-10°(即處于“關”態)時,反射光線偏離投影系統,被吸收裝置吸收,屏幕上對應的像素呈現暗態。因此,通過控制微鏡的“開”、“關”狀態,就可以控制圖像每個像素的亮、暗狀態,在屏幕上生成一幅投影圖像[12,13]。
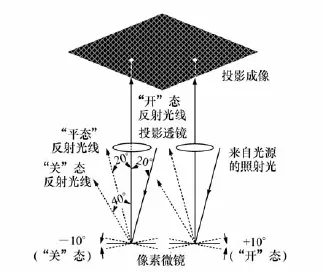
圖4 兩個DMD光開關的工作原理
每個微鏡均采用雙穩態工作。圖5是雙穩態DMD的示意圖。由圖5可知,微鏡位于扭轉片之上,扭轉片以鉸鏈為軸,帶動微鏡一起偏轉。當扭轉片的末端與搭接電極接觸,扭轉片便停止轉動,保持平衡狀態。扭轉片的偏轉角大小完全由DMD的機械構造所決定,用以保證偏轉角的精確性不受外界因素與積分時間長短的影響。由于偏轉角的大小在設計芯片時已經固定,所以控制微鏡的狀態時,只需考慮偏轉方向,而無需考慮控制信號的強弱,從而實現數字開關量控制。扭轉片的偏轉方向由加在尋址電極上的尋址電壓決定,尋址電壓的高低電平由CMOS存儲單元提供的二進制信號來控制。當CMOS存儲單元輸出信號為0時,尋址電壓呈低電平,微鏡的偏轉角度為-10°;當CMOS存儲單元輸出信號為1時,尋址電壓呈高電平,微鏡的偏轉角度為+10°。在扭轉片上加有一個偏置電壓是為了使扭轉片具有雙穩態特性,達到使用較低的尋址電壓來獲得較大的偏轉角,標準MOS晶體管5 V電壓即可[14]。
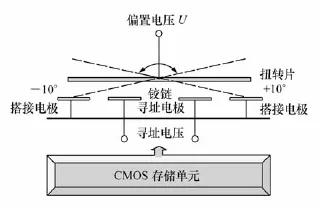
圖5 雙穩態DMD原理圖
2.3 DMD的灰度等級控制
如果僅僅控制微鏡的偏轉方向,得到的只是一幅黑白二值圖像,而為了使投影圖像更逼真地模擬真實目標和背景,傳達更豐富的現場信息,往往需要包含灰度信息。灰度等級是指灰度圖像由黑色到白色之間的亮度層次,就像我們平時看到亮度由暗到明的黑白照片,亮度變化是連續的。在數字圖像中,用灰度表示亮度值,為了表示這種灰度信息,需要把灰度值進行量化。比如將灰度劃分為0~255共256個灰度等級,0表示最暗(全黑),255表示最亮(全白),每個像素都有自己的灰度值。用于表示每一像素灰度值的比特數越高,灰度等級也越高,顯示的圖像就越豐富,畫面更細膩,圖像也會更逼真。若比特位數為b,則圖像有2b個灰度等級。
為了使DMD投影成像具有更豐富的灰度信息,就需要進行灰度調制。灰度調制的基本原理就是人眼在空間上對分辨率不敏感和在時間上存在“視覺暫留”的特性,因此,灰度調制的方法也可以從空間和時間上加以考慮。下面介紹幾種常見的灰度調制方案。
(1)空間灰度調制
空間灰度調制是在單幀圖像內,將一定數目的基本像素單元合并成為一個“大像素”,而這個“大像素”中的每個基本像素單元僅有0和1兩個灰度級,并且是單獨可控的。如圖6所示,分別控制這個“大像素”中各基本像素單元處于“亮”態和“暗”態的數量,當在一定距離外觀察投影圖像時,整幅圖像將顯示不同的灰度級,從而實現圖像的灰度調制。
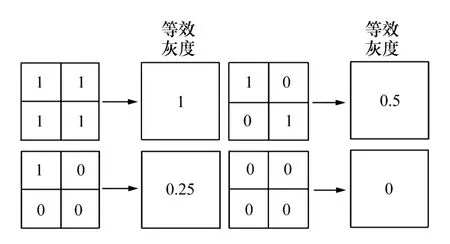
圖6 空間灰度調制示意圖
空間灰度調制法實現簡單,只需單獨控制每個基本像素單元的“開”、“關”狀態,無需復雜的控制方案和驅動電路,就可實現圖像的灰度等級調制。但是,空間灰度調制法也有其無法克服的缺點。首先,每個基本像素單元的灰度等級并沒有改變,而是通過改變“大像素”所包含的基本像素單元中處于“亮”態和“暗”態的數量比,來改變“大像素”的灰度級,這樣,整幅圖像就不可能實現很多的灰度等級。如圖6所示,若將4個基本像素單元組成一個“大像素”,則其灰度等級僅有5級。
其次,若想提高圖像的灰度等級,只有通過增加“大像素”所包含的基本像素單元數量來實現,這樣就導致了圖像分辨率下降,雖然圖像的灰度等級提高了,但卻是以降低圖像分辨率為代價的,效果適得其反。因此,通過空間灰度調制,灰度等級并不能無限制提高,而應該綜合考慮灰度等級與分辨率的相互影響。
(2)幀灰度調制
幀灰度調制是將連續的一定數目的幀合并成為一個“大幀”,每一幀可以稱之為“子幀”。如圖7所示,分別控制每個“子幀”中各像素的“亮”、“暗”狀態,由于人眼的“視覺暫留”現象,不同“子幀”同一位置的像素亮度將被疊加,從而呈現不同的灰度等級,實現圖像的灰度調制。
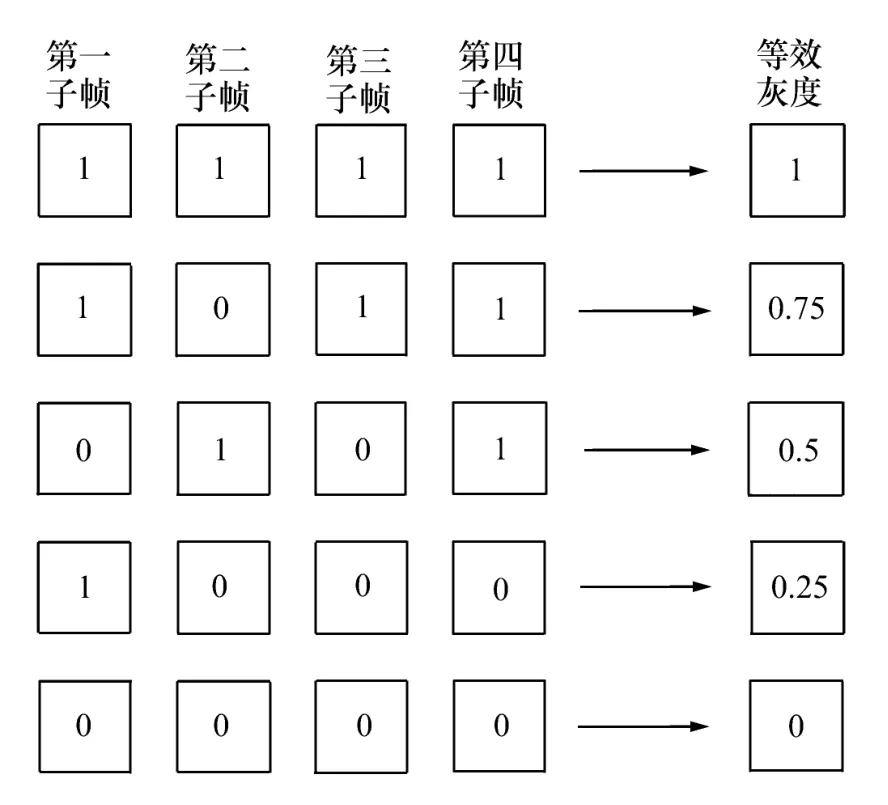
圖7 幀灰度調制示意圖
與空間灰度調制相比,幀灰度調制不會影響投影圖像的分辨率,但把若干幀合并成為一個“大幀”作為顯示單位,而不提高幀頻,可能導致灰度級別的閃爍;但提高幀頻又會受到DMD顯示器件及視頻處理電路的響應時間限制,所以幀灰度調制有其固有的瓶頸。
(3)脈寬灰度調制
任何圖像的顯示,都是在動態掃描驅動下對位比特流的操作。位比特流由DLP視頻處理電路產生,圖像的顯示過程就是從位比特流中取出各比特位,根據比特位的二進制數值對顯示屏幕進行掃描。脈寬調制(PWM)法就是根據這一原理來實現的。
PWM法也稱占空比法,其輸出驅動的高低電平直接反映了像素比特值的大小,輸出驅動脈沖的占空比代表了灰度等級。首先,將脈沖的持續時間(寬度)根據圖像數據劃分為多個等級,圖像數據的最高有效位(MSB)對應的持續時間最長,最低有效位(LSB)對應的持續時間最短,并按權重等比例排列。如圖像數據為n位,則每位圖像數據對應的持續時間應為2n∶2n-1∶…∶21∶20。當數據為“1”時,對應的脈沖等級為高電平,當數據為“0”時,對應的脈沖等級為低電平,從而使被選通的像素實現不同的灰度等級[15,16]。如圖8所示,若灰度等級為16,則在場時間周期內,將最高灰度級數據脈寬分為15等分,灰度級0、1、2、…、14、15分別對應占空比0、1/15、2/15、…、14/15、1。
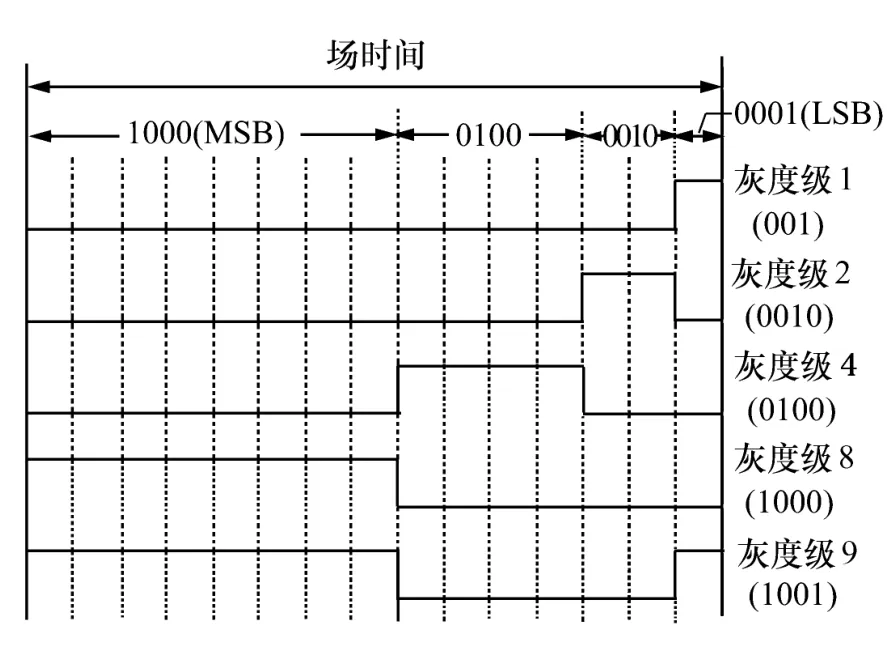
圖8 二進制PWM控制像素灰度等級示意圖
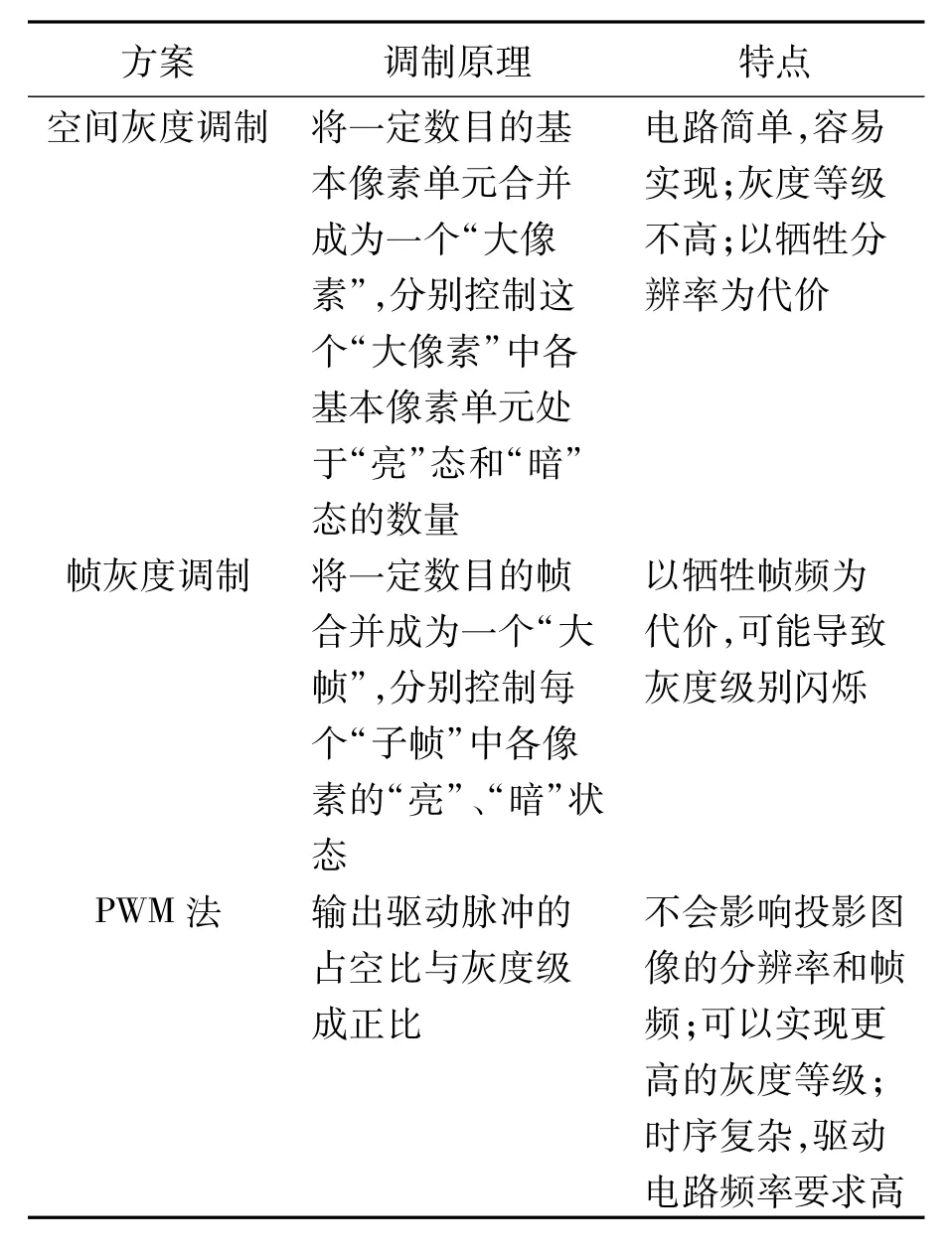
表1 灰度調制方案Tab.1 Gray-scalemodulation schemes
相比前面兩種灰度調制技術,脈寬灰度調制既不影響投影圖像分辨率,也不會影響投影圖像的幀頻,可以實現更高的灰度等級。但是,脈寬灰度調制時序復雜,要求驅動電路具有較高的工作頻率,實現難度較大。
綜上所述,以上幾種灰度調制方案在空間、時間等不同的方面對投影圖像的灰度等級進行調制。表1歸納了各自的調制原理及其特點。
3 DLP顯示系統
隨著TI公司于1987年成功研制出DMD,第一臺基于DMD器件的DLP投影顯示器也于1996年推向市場。不到3年時間,DLP投影系統被廣泛應用于移動便攜式設備、會議室、電視墻、家庭影院及大型集會等,為人們提供了高畫質、全數字的“無縫”圖像[17]。DLP系統不僅可以實現灰度圖像的顯示,還可輸入RGB信息,實現彩色圖像的顯示。根據DLP系統中所含DMD數量的不同,可以把DLP系統分為單芯片DLP投影系統、雙芯片DLP投影系統及三芯片DLP投影系統。在實際應用中,應權衡成本、光效率、能量損耗、重量、體積等因素,選擇合適的DLP投影系統。本文介紹了這3種DLP系統實現數字彩色圖像投影的原理[18,19],分析了各自優缺點,并指出其應用場合。
3.1 單芯片DLP投影系統
全數字化的單芯片DLP投影系統的結構如圖9所示,其中DMD工作在顏色場順序模式,即采用一個包含三原色(RGB)的彩色輪作為濾光片,彩色輪一直處于旋轉狀態,來自光源的白色光經過聚光透鏡后通過該彩色輪,被過濾為R,G,B 3個分量,并順序地照射在DMD芯片上。為了消除照射光線與投影光線之間的干擾,在彩色輪與DMD之間設計了一個全內反射棱鏡。經過DLP視頻處理電路,格式化的數字圖像數據被寫入DMD的CMOS(SRAM)存儲器,以控制DMD微鏡的狀態,對照射在DMD表面的光進行調制。如若存儲器中數據為“1”,則DMD微鏡處于“開”態,來自微鏡的光直接被反射入投影透鏡,并最終顯示在投影屏上。而若存儲器中數據為“0”,則微鏡處于“關”態,反射光被光吸收裝置所吸收,無法到達投影屏幕。在此,投影透鏡除了收集來自DMD的反射光,還具有對圖像的放大作用。選擇與屏幕尺寸相匹配的投影透鏡,將R,G,B光順序投影在屏幕上,便產生一幅RGB彩色圖像。
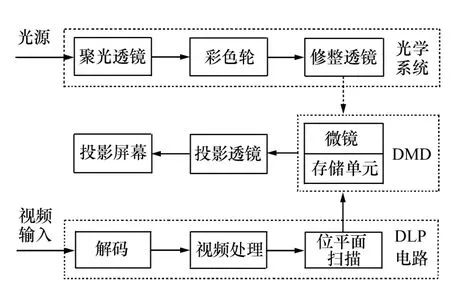
圖9 單芯片DLP投影系統
單芯片DLP投影系統能夠將RGB三原色自行融合,成本低廉,輕便靈巧,非常適合應用于移動設備。但彩色輪在任一時刻只允許其中一種顏色分量通過,光源使用效率只能達到1/3,所以光源通常采用金屬鹵化物燈,以產生更大的光照強度,防止投影圖像灰度過低。若應用于單色模式,光學系統便無需采用彩色輪(即產生灰度圖),則不存在這個問題。
3.2 三芯片DLP投影系統
為了克服單芯片DLP投影系統的不足,提高投影圖像的亮度,TI公司又開發出了適合大屏幕投影顯示的三芯片DLP投影顯示系統。三芯片DLP投影顯示系統通過三片DMD分別對應一種顏色分量,在一個電視場周期內,任一種顏色分量都可連續地投射在投影屏幕上,因此,投影圖像可以達到更高的亮度和灰度等級。
首先,利用分光鏡將白光分解成R,G,B 3個顏色分量,并分別投向對應的DMD,若微鏡處于“開”態,則不同顏色的反射光重新組合,并穿過全內反射棱鏡投向投影透鏡,最終將圖像顯示在投影屏幕上。三芯片DLP投影顯示系統的光學系統如圖10所示。
三芯片DLP投影顯示系統具有較高的光學效率,特別適合應用于要求高亮度、大屏幕投影圖像的場合,如大型集會、貿易展覽等場合公共信息的展示。
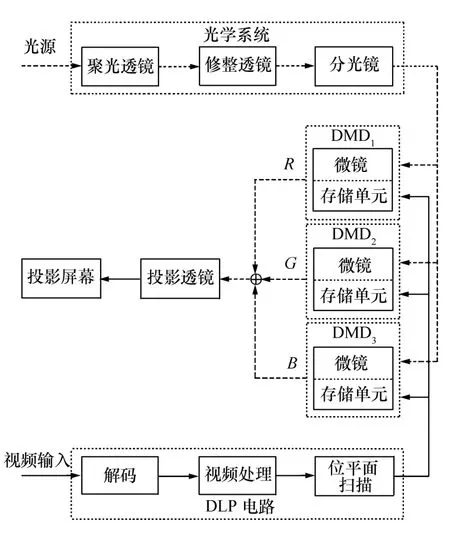
圖10 三芯片DLP投影系統
3.3 雙芯片DLP投影系統
為了低成本和高效率,在單芯片DLP投影系統中使用了金屬鹵化物燈。但在某些應用領域光亮度又顯得不夠,需要在光輸出和精確的顏色之間進行權衡,因此提出了獨特的雙DMD結構。雙芯片DLP投影系統應用了來自單片DLP系統的順序彩色輪的方法以及來自三片DLP系統的雙色分光棱鏡的概念,同時考慮到金屬鹵化物燈紅光缺乏這一特點。在雙芯片DLP投影系統中,彩色輪不用R,G,B濾光片,而是使用兩個輔助顏色—品紅和黃色取而代之。彩色輪的品紅片段允許紅色光和藍色光通過,黃色片段允許紅色光和綠色光通過。結果是紅色光一直可以通過濾光系統,在整個場時間內,投影圖像都包含紅色分量,藍色光和綠色光則交替通過處于旋轉狀態的彩色輪,即藍色光和綠色光各有一半的時間到達投影屏幕。
一旦通過彩色輪,光線直接射到雙色分光棱鏡系統上,連續的紅光被分離出來而射到專門用來處理紅光和紅色視頻信號的DMD上,順序的藍色與綠色光投射到另一個DMD上,專門處理交替的藍色和綠色分量,這一DMD由綠色和藍色視頻信號驅動。
與單片DLP系統相比,雙色系統紅光輸出是原來的大約3倍。并且因為彩色輪現在只有兩個而不是3個濾光片組成,在一給定的視頻畫面中藍光和綠光輸出增加約50%(即由1/3場時間增加到1/2場時間)。以上改進使雙片DLP系統有能力產生優秀逼真的顏色,提高光學效率。
3.4 DLP投影系統的優勢
與普遍采用的陰極射線管(CRT)投影技術和液晶顯示(LCD)投影技術相比,基于DMD的DLP投影顯示系統存在諸多優點,具體表現在以下幾個方面。
(1)高像素填充因子與均勻性
DMD芯片的微鏡尺寸為16μm,中心間距為17μm,因此,像素填充因子達90%以上。換句話說,微鏡陣列90%以上的有效面積能反射來自光源的光線,產生投影圖像。在整片微鏡陣列中,像素尺寸及空間均勻性均能保持一致,且不受分辨率提高的影響。與此相反,CRT投影技術由于依賴于電子束掃描,而不是像素化的矩陣,因此無法產生方形像素。由于DMD芯片的填充因子較高,在視覺上也顯得更清晰,采用漸進式掃描技術產生的投影圖像與傳統的投影顯示技術相比更令人賞心悅目。
(2)高光學效率
若將光學效率定義為輸出光強與輸入光強之比,DMD總體上的光學效率可達60%以上。這樣,投影圖像可以呈現更明亮的色彩,提高灰度等級。對于DMD器件,光學效率主要由4部分組成:微鏡處于“開”態的時間、微鏡表面反射效率、微鏡陣列填充因子及微鏡衍射效率,總體光學效率即為以上4部分相乘。
與此相反,LCD投影顯示的光學效率先天低下。首先,LCD采用極化相關技術,只利用其中一半的極化光,另一半則被晶體管和LCD元件所阻擋。除了這些光損失,液晶材料本身也吸收部分光源,導致只有很小的光強可以通過LCD面板到達顯示屏。
(3)高分辨率與高亮度
對于DLP投影系統,提高分辨率只需增加微鏡的數量,投影圖像的分辨率不會受到亮度的影響。而對于CRT投影儀,隨著亮度的增加,熒光粉的增強會導致分辨率降低。在DLP投影系統中,投影圖像的亮度只與光源和采用DMD的數量(即單片、雙片或三片DLP投影系統)有關,增加亮度意味著DMD微鏡反射更多的光到達屏幕,對分辨率不會有任何影響。因此,DLP投影系統可以更靈活地滿足用戶需求,其高分辨率和高亮度性能在投影顯示領域具有非常廣闊的應用前景。
(4)全數字化控制
由于DMD器件微鏡陣列的“開”、“關”狀態對應于二進制信號“1”、“0”,只需為每個像素微鏡提供數字驅動信號,就可直接轉換為光信號,而不需要在顯示之前將數字圖像信號通過D/A轉換成模擬信號。而且DMD器件對投影圖像的灰度調制也可通過二進制脈寬調制來實現,這樣就完成了投影圖像的全數字化控制輸出。全數字化控制的DMD器件靈敏度高,投影圖像具有更高的灰度等級和對比度,通常R,G,B每種顏色分量都可達到8到10位的灰度等級,色彩更加鮮明豐富。
(5)高穩定性和長使用壽命
作為一種商業化成熟的投影顯示系統,DLP具有高穩定性和長使用壽命的特點。DMD器件能夠承受在復雜環境中的測試,可以滿足從商業到軍事級的應用。DMD器件的使用壽命主要取決于機械鉸鏈的耐用性,經過TI公司的測試,即使經受超過1012次的重復翻轉(相當于20年的使用時間),這些鉸鏈仍完好無損。
4 基于DMD的DIRSP系統
為滿足紅外導引頭硬件閉環仿真與紅外傳感器測試的需要,美國光學科學公司(OSC)于2001年研制出第一臺正式商用的基于DMD的DIRSP系統。
基于DMD的DIRSP系統的顯示原理與DLP投影系統相似,也可分為單片DMD投影系統、雙片DMD投影系統與三片DMD投影系統,它們的顯示原理基本相同。下面首先介紹基于DMD的DIRSP系統的工作原理、實現方案,然后再對基于DMD的DIRSP技術的性能指標,以及關鍵技術進行介紹與分析。
4.1 基于DMD的DIRSP系統工作原理
基于DMD的DIRSP系統又稱MAPS,其技術基礎正是DLP投影顯示技術,只不過是將應用場合由可見光成像變為紅外成像,其基本原理如圖11所示[8,20]。由圖可知,一個完整的MAPS主要由3部分組成:投影頭、支撐電路以及計算機圖像生成器。投影頭包括DMD、DMD驅動電路、輻射源、輻射源控制器以及準直投影透鏡;支撐電路包括視頻轉換電路、同步信號處理器及電源;計算機圖像生成器可用于產生圖像數據,監控投影系統的狀態,設置輻射源的溫度,以及投影系統的其他運行參數等。
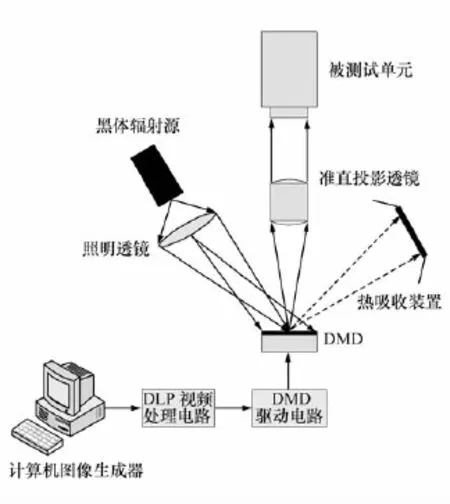
圖11 基于DMD的DIRSP系統示意圖
首先將需要測試的紅外場景圖像數據保存在計算機圖像發生器(Computer Image Generator,CIG)中,產生的圖像數據通過視頻轉換電路和DMD驅動電路輸入DMD器件,并將數據保存在CMOS存儲單元,以產生驅動電壓控制DMD的狀態;此處選用黑體輻射源作為紅外光源,通過照明透鏡均勻照射DMD,由于事先已經將場景圖像數據保存在CMOS存儲單元,于是DMD能夠通過改變微鏡狀態產生紅外熱圖像。這里生成的紅外圖像就能真實還原目標、背景等場景信息,然后將生成的紅外場景通過光學準直投影透鏡投射到被測試單元(UUT)的入瞳處,使被測試單元如同在真實環境中工作,以達到評價制導系統性能的目的。
DMD驅動電路位于投影頭中DMD芯片的背面,它從視頻轉換電路中獲得視頻數據流,產生同步二進制PWM信號,以控制DMD微鏡的偏轉。驅動電路是基于FPGA設計的,以方便新系統的升級與擴展。
支撐電路的功能包括從視頻源接收各種格式的視頻信號,包括DVP2、DVI、RS-170/PAL、RGBHV(CRT)及S-Video,并將視頻信號轉換成二進制位流后,輸入DMD驅動電路。支撐電路可以通過串行接口將投影系統的運行狀態反饋給用戶,用戶也可通過上位機的主控軟件向支撐電路輸入同步信號及其他命令,以利用支撐電路將控制信號輸入投影系統。例如用戶可設置輻射源的溫度,以產生所需的表觀溫度。
4.2 MAPS的性能指標
在紅外成像制導系統的試驗階段,MAPS的性能直接決定了制導系統的仿真效果。為了提高仿真精度,產生更逼真的紅外仿真目標,獲得更準確的試驗結果,對投影圖像的分辨率、幀速、對比度、灰度等級等方面都有一定的要求。
(1)總體性能
DIRSP系統的性能指標主要有表觀溫度、對比度、分辨率、幀頻等,表2列出了目前MAPS投影儀的總體性能指標。
(2)表觀溫度范圍
表觀溫度反映了DIRSP系統輻射面上輻射能量的空間分布,表觀溫度范圍越大,表現真實目標和背景的實際能量分布的能力也越強,模擬真實環境的投影圖像也越逼真。MAPS的表觀溫度取決于輻射源的溫度。對于紅外探測器常用的3~5μm波段,模擬系統溫度范圍為0~700℃;對于8~13μm波段,若用于反坦克,溫度范圍為室溫以上30℃內,用于對空導彈為0~150℃。
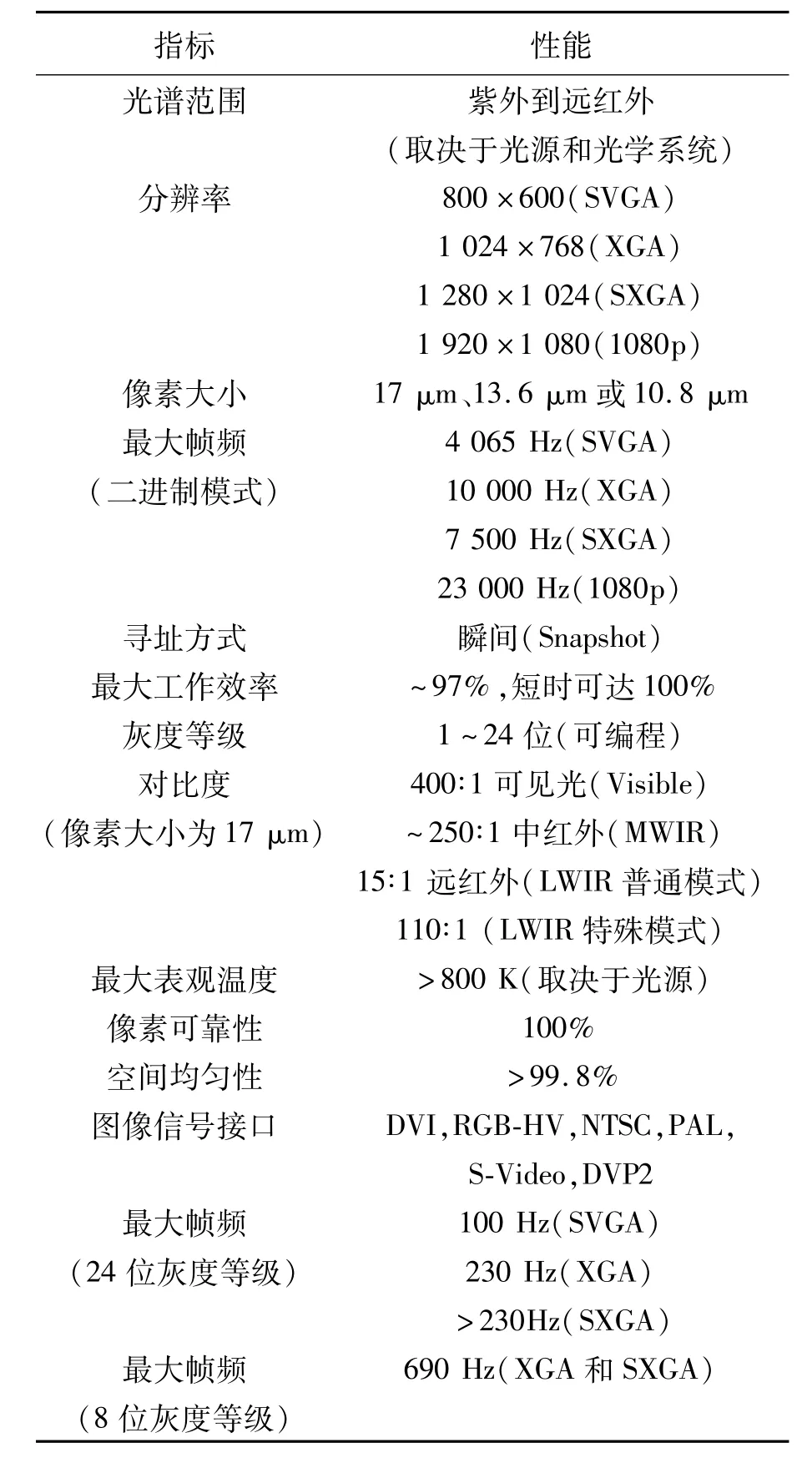
表2 MAPS投影儀的性能特征[8]Tab.2 MAPS performance summary[8]
(3)對比度
對于任何類型的空間光調制器,對比度都是一個重要的性能參數。當利用微鏡間距為17μm的DMD芯片,在中紅外波段,MAPS對比度達250∶1以上;在遠紅外波段,分為普通模式和特殊模式,兩者分辨率相差較大,在MAPS對比度達250∶1以上;在普通模式,對比度為15∶1,而在特殊模式,對比度可以達110∶1以上。當采用下一代的13.6μm的DMD芯片,在中紅外波段的對比度超過了330∶1。
(4)空間分辨率
數字圖像都是由許多的點構成的,這些點稱為像素,像素越多,分辨率就越高。紅外成像制導系統在識別、跟蹤目標的過程中,面對的是模擬的真實場景。因此,投影圖像的分辨率越高,就越能真實地模擬目標和背景。由于投影圖像的每一像素對應于DMD芯片的一塊微鏡,因此,投影圖像的分辨率取決于DMD芯片的分辨率。DMD陣列的分辨率分為SVGA(800×600)格式、XGA(1 024×768)格式及SXGA(1 280×1 024)格式,采用第二代和第三代DMD芯片,投影圖像可以實現1 080p(1 920×1 080)格式。
(5)幀頻
數字視頻信號都是由離散化的圖像序列按順序排列而成,更新序列的速度就是幀頻。投影圖像的幀頻取決于視頻處理電路和驅動電路的視頻數據處理速度與DMD微鏡的翻轉速度,幀頻越高,播放的視頻信號越連貫,越能真實反映實際的場景,仿真效果也越好。
4.3 基于DMD的DIRSP系統關鍵技術
由于DMD是為可見光投影和人眼感知設計的,若將其用于DIRSP,就必須對DMD進行如下改進:
(1)DMD光學窗的光譜投射問題
由于DMD采用鋁濺射工藝,因此可以反射可見光波段內的光譜,但卻不能反射波長大于2.7μm的光譜。因此,為了使DMD適用于傳統的中波和長波紅外波段(3~5μm和8~12μm),需要改變原來的光學窗,并以紅外光學窗取而代之。由于DMD是采用鋁濺射工藝制成,紅外光學材料無法直接安裝在原有微鏡表面,必須首先除去微鏡表面的可見光光學窗,然后再安裝紅外光學窗,以保證所有微鏡在紅外波段內的有效性。
(2)PWM所導致的短暫假信號和抖動
將DMD應用于紅外場景投影和探測器測試所引起的最大問題是由于PWM所導致的短暫假信號和抖動。DMD是一種二元(非“開”即“關”)器件,在標準的DLP系統中,投影圖像灰度等級的控制采用二進制脈寬調制技術(PWM),具有長積分時間的探測器(相對于微鏡的開關速度而言)可以察覺到微鏡像素的灰度等級,即對應于微鏡處于“開”態所占的時間比例。在標準的單片DMD系統中,PWM結合彩色輪產生各種顏色。然而,在紅外場景投影中,DMD的PWM調制如果不與探測器積分時間同步,就會導致短暫假信號與抖動問題。這個問題在一個焦平面陣列(Focal Plane Array,FPA)的卷積積分探測器中表現得尤為嚴重。為此,必須設計完全可編程的專用時序控制電路,驅動DMD與FPA積分時間同步。
(3)場景生成器接口設計
HWIL要求計算機場景生成器能夠實時輸出低延時、高幀頻和高分辨率的動態場景,因此,投影系統必須具備低延時、高幀頻和高分辨率的特點才具有實際意義。微鏡陣列投影系統具有兩個DVI視頻接口,對于每個最小化傳輸差分信號鏈路,每個接口支持24位視頻輸入,速度高達1.65 ×108pixel/s。當輸入未壓縮的SXGA格式的DVI視頻信號時,微鏡陣列投影系統的最大幀頻可達239 Hz。視頻接口實現了完全可編程設計,以支持其他格式和幀頻的視頻輸入。例如,它同樣支持幀頻為690 Hz,分辨率為1 024×768的8位視頻信號輸入。微鏡陣列同樣支持DVP2、RGB -HV、NTSC/PAL以及S-Video視頻格式的輸入,在將視頻信號輸入投影頭之前,利用支撐電路將以上視頻格式轉換為DVI視頻。支撐電路的設計除了要求滿足低延時特性外,還要求整幅圖像同時更新(即以快照模式更新)。
(4)光學系統設計
為了支持紅外探測器測試,微鏡陣列投影系統的光學系統與將圖像投影到屏幕上的標準投影儀的光學系統有很大區別。若將圖像投影到屏幕上,則輸出光通常發散度極大,而典型的紅外投影儀光學系統的輸出光通常平行照射,使探測器直接接收來自投影儀的光。出射光瞳必須足夠大,以完全覆蓋探測器的入射光瞳。在所要求的紅外波段內,還必須優化光學系統性能以提供更好的紅外圖像質量。最后,投影儀光學系統必須確保探測器的入射光瞳被均勻照射。由于DMD微鏡的偏轉角是固定不變的,在保持照明一致性的前提下,同時滿足投影儀的視場與光瞳直徑一致的要求并不容易。
(5)輻射源設計
微鏡陣列投影系統的輻射源必須能在感興趣的波段內為投影儀的出射光提供足夠的能量。通常是將黑體作為DMD用于紅外投影時的輻射源,然而,其他如高溫熱源、紅外激光等也可在此作為輻射源使用。輻射源的輻射強度必須可受用戶控制以優化場景測試的性能,通常這可以通過控制黑體的溫度實現。更先進的系統可以高速控制輻射強度,以更好地匹配仿真要求,提高投影圖像的溫度分辨率。最后,輻射光必須與DMD和投影儀出射光瞳的光學窗一致,以使產生的圖像對比度最大化。
(6)DMD的衍射問題
即使解決以上所有問題,DMD仍然無法應用于紅外場景投影。這是由于微鏡尺寸與紅外波長相差不多,所以會產生衍射現象。由于衍射現象的存在,不但使圖像空間分辨率受限,而且圖像對比度也會下降。對于可見光,典型的對比度為400∶1,而對于中紅外光,其對比度會降到90∶1。幸運的是,對比度下降得并不像預計地那么嚴重,在中長紅外光波段仍具有較好的表觀溫度范圍。也因為DMD在其他方面有無可比擬的優勢,MAPS也成為紅外投影技術最優秀的代表之一。
5 結束語
本文較系統地介紹了基于DLP投影顯示技術的DIRSP技術及其核心器件DMD的投影原理。由于投影需求及技術水平的提高,投影系統的仿真規模由小到大、從局部向全面發展,并逐漸由軍用轉向了國民經濟各個方面的應用。例如各類大型工業、運輸行業系統運行操作的培訓已有了眾多的成功先例。DIRSP系統的建立無論是對我國的國防建設,還是國民經濟建設都有十分重要的意義。而本文提到的基于DMD的DIRSP具有諸多優點,因此,該項技術已經成為紅外場景仿真與投影顯示領域的研究熱點。
對于基于DMD的DIRSP技術下一步的研究工作,作者認為主要應從研究如何提高投影圖像的對比度、分辨率、灰度等級和幀頻入手,這也直接決定了投影圖像模擬外場環境的逼真度,是保證制導系統試驗高效性與準確性的關鍵。將DMD從可見光投影應用于紅外場景投影,上述性能指標均有不同程度下降,因此,DMD動態紅外場景投影技術仍有極大的研究空間。
[1]DRIGGERSR G,BARNARD K J,BURROUGHS E E,et al..Review of infrared scene projector technology-1993[J].Opt.Eng.,1994,33(7):2408-2417.
[2]WILLIAMSOM.Dynamic infrared scene projection:a review[J].Infrared Phys.Technol.,1998,39(7):473-486.
[3]高教波,王軍,駱延令,等.動態紅外場景投射器研究新進展[J].紅外與激光工程,2008,37(S2):351-354.
GAO JB,WANG J,LUO Y L,et al..Progress in the development of dynamic infrared scene projector[J].Infrared Laser Eng.,2008,37(S2):351-354.(in Chinese)
[4]陳二柱.DMD動態紅外景象投影技術[J].紅外,2004,(2):28-35.
CHEN E ZH.DMD dynamic infrared scene projection technology[J].Infrared,2004,(2):28-35.
[5]康為民,李延彬,高偉志.數字微鏡陣列紅外動態景象模擬器的研制[J].紅外與激光工程,2008,37(5):753-756.
KANGW M,LIY B,GAOW ZH.Dynamic IR scene projector using a Digital Micro-mirror Device[J].Infrared Laser Eng.,2008,37(5):753-756.(in Chinese)
[6]陳二柱,梁平治.數字微鏡器件動態紅外景象投影技術[J].紅外與激光工程,2003,32(4):331-334.
CHEN E ZH,LIANG P ZH.DMD dynamic infrared scene projection technology[J].Infrared Laser Eng.,2003,32(4):331-334.(in Chinese)
[7]MCHUGH S,WARNER J,POLLACK M,et al..MIRAGE dynamic IR scene projector overview and status[J].SPIE,1999,3697:209-222.
[8]EASLEY D B,BENDER M,CROSBY J,et al..Dynamic infrared scene projectors based upon the DMD[J].SPIE,2009,7210:72100I/1-72100I/2.
[9]王明剛.DLP光機特性的分析與測量研究[D].杭州:浙江大學,2005.
WANGM G.Measurement and analysis on Digital Light Processing optic engine characteristic[D].Hangzhou:Zhejiang University,2005.(in Chinese)
[10]MICHAEL R D.DMD reliability:a MEMS success story[J].SPIE,2003,4980:1-11.
[11]DOUGLASSM R.Lifetime estimates and unique failuremechanisms of the DigitalMicromirror Device(DMD)[C].Proceeding of the 36th Annual International Reliability Physics Symposium,Reno,Nevada,March,1998:9-16.
[12]KNIPE R L.Challenges of a Digital Micromirror Device:modeling and design[J].SPIE,1996,2783:135-145.
[13]劉莞爾.紅外動態圖像仿真系統中DMD芯片的灰度調制技術研究[D].成都:電子科技大學,2008.
LIUW E.Research on grayscale modulation technologies in the system based upon DMD chips for infrared simulation[D].Chengdu:University of Electronic Science and Technology of China,2008.(in Chinese)
[14]賈建援,陳恭華.數字微反射鏡的機械光學特征研究[J].電子機械工程,2000,86(4):3-7.
JIA JY,CHEN G H.Study on the mechano-optical properties of Digitalmicromirror devices[J].Electro-Mechanical Eng.,2000,86(4):3-7.(in Chinese)
[15]DUDLEY D,DUNCANW,SLAUGHTER J.Emerging Digital Micromirror Device(DMD)applications[J].SPIE,2003,4985:14-25.
[16]HORNBECK L J.Digital Light Processing:a new MEMS-based display technology[EB/OL].[2010-01-11].http://focus.ti.com/pdfs/dlpdmd/117_Digital_Light_Processing_MEMS_display_technology.pdf.
[17]HORNBECK L J.A digital light processing update:status and future applications[J].SPIE,1999,3634:158-170.
[18]FLORENCE JM,YODER L A.Display system architectures for DigitalMicromirror Device(DMD)based projectors[J].SPIE,1996,2650:193-208.
[19]鄒靜嫻,吳榮治.數字微鏡器件(DMD)[J].液晶與顯示,2003,18(6):445-449.
ZOU JX,WU R ZH.Digital Micromirror Device(DMD)[J].Chinese J.Liquid Crystals Displays,2003,18(6):445-449.(in Chinese)
[20]HU Y,GAO JB,WANG J,et al..Study of dynamic infrared scene projection technology based on Digital Micromirror Device(DMD)[J].SPIE,2007,6835:68350T/1-68350T/7.
Dynam ic infrared scene projection technology based upon digitalm icrom irror device
CHEN Jian-hua1,2,ZHU Ming1,HUANG De-tian1,2
(1.Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033,China;
2.Graduate University of Chinese Academy of Sciences,Beijing 100039,China)
Dynamic Infrared Scene Projection(DIRSP)technology is amajormethod to evaluate the performance of infrared imaging measurement and tracking systems.The developments and applications of DIRSP technology at home and abroad are reviewed in this paper.Some of the popular DIRSP technologies and their characteristics are provided,then the operating principle andmechanical structure of a Digital Micromirror Device(DMD)are given.A new projection display technology based on DMD called Digital Light Processing(DLP)is briefly introduced,which can be divided into three types according to the number of DMD chips contained.The different features and applications of the DLP are also described.Furthermore,this paper lays particular emphasis on a DIRSP system based on DMD,namely,Micromirror Array Projector System(MAPS).It analyzes its operating principle,basic design,performance capabilities and technical advantages and discus-ses the key technical issues to be used as a DIRSP.In the end,based on the application background and research status of DIRSP,it presents the following step of research work.
Digital Micromirror Device(DMD);Digital Light Processing(DLP);Dynamic Infrared Scene Projection(DIRSP);Micromirror Array Projector System(MAPS)
V448.33;TN27
A
1674-2915(2010)04-0325-12
2010-03-11;
2010-05-13
陳建華(1987—),男,浙江義烏人,碩士研究生,主要從事數字圖像采集與處理方面的研究。
E-mail:jhchen_zju@163.com
朱 明(1964—),男,江西南昌人,研究員,博士生導師,主要從事圖像處理、電視跟蹤和自動目標識別技術的研究。E-mail:zhu_mingca@163.com
黃德天(1985—),男,福建龍巖人,碩士研究生,主要從事數字圖像采集與處理方面的研究。
E-mail:dthuang@sina.com
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
