GPS導航數據提取的設計與研究*
2010-05-18 07:28:22王景中
網絡安全與數據管理 2010年20期
關鍵詞:嵌入式
牛 立,王景中
(北方工業大學 信息工程學院多媒體實驗室,北京100144)
Windows CE是一個開放的、可裁剪的、32位實時嵌入式窗口操作系統,具有可靠性好、實時性高、內核體積小的特點,廣泛應用于各種智能式設備的開發。系統通過微軟提供的Platform Builder定制需要的Windows CE5.0系統,運行在硬件平臺上。硬件平臺采用博創科技PXA270實驗箱,該實驗箱嵌入式處理器是基于ARMV5E的Xscale核心PXA270,并支持串口通信。
GPS導航芯片采用天寶iQ 46240,將接收到的數據通過串口發送給處理器。串口是計算機系統與外部串行設備之間的數據傳輸通道,是嵌入式通信最可靠、最通用的通信方式。程序員利用Windows API函數可以編寫出高效、可移植性的應用程序。Windows CE不支持Windows下常用的串行通信異步I/O方式(Overlapped,非阻塞),因此在嵌入式環境下采用了同步I/O方式的通信程序設計方法。
實驗設計根據GPS導航數據有效性確認的標準,對提取的數據進行處理,把緩存中接收到的GPS數據格式轉化為電子地圖上常用的浮點型格式。此設計已應用于智能閱讀器盲用定位模塊中。
1 串口通信同步I/O方式的程序設計
串口通信是串行通信的一種,串行通信的模式一般分為上位機和下位機通信。上位機可以讀取下位機的狀態數據,也可以設置下位機的狀態。一般串行通信協議可分為兩類,即讀和寫。讀寫協議的描述如圖1所示,常用的效驗碼有異或、累加和、CRC等[1]。
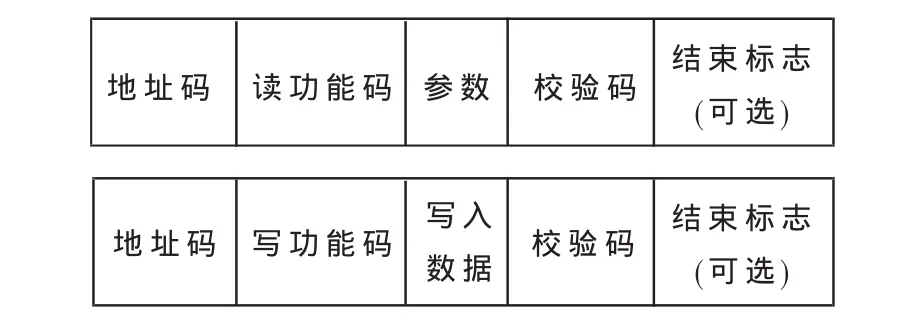
圖1 通信協議的一般結構
在實驗設計中,GPS接收裝置作為下位機只負責提供固定格式的數據,實驗箱作為上位機不必發送指令,只負責定時讀取GPS接收裝置發送的數據。即可以簡化通信協議,提高工作效率。
1.1 設計開發環境
在Windows NT/ME環境下安裝eVC4.0編程環境,設置順序如下:
(1)安裝同步軟件 Microsoft ActiveSync 4.0;
(2)安裝 eVC4.0;
(3)利用 PB(Platform Builder5.0)定制 Wince系統對應的SDK并安裝;
(4)利用PB將定制的wince系統下載到實驗箱上,并與 PC機同步[2]。
1.2 同步I/O方式讀取的設計方法
為完成串口通信同步I/O方式程序設計,分為三個部分,每個部分有一個函數完成其對應的功能[3]。函數原型為:
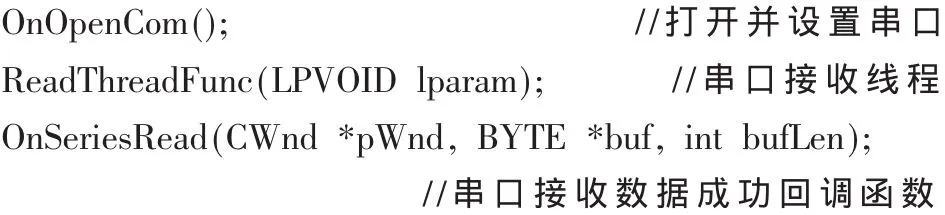
串口接收的具體流程圖如圖2所示,圖中對應了串口設置的三個功能函數。
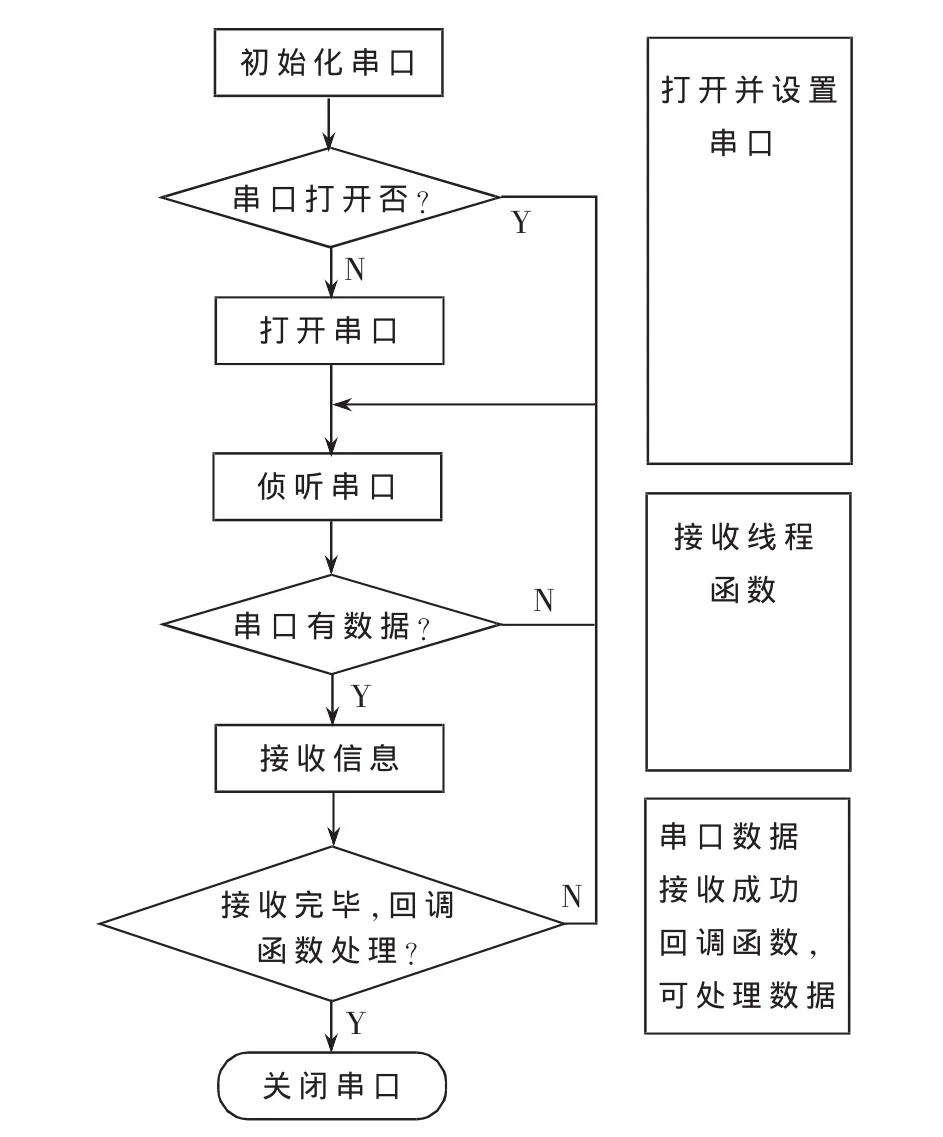
圖2 串口接收的具體程序流程圖
1.3 程序設計的核心代碼實現
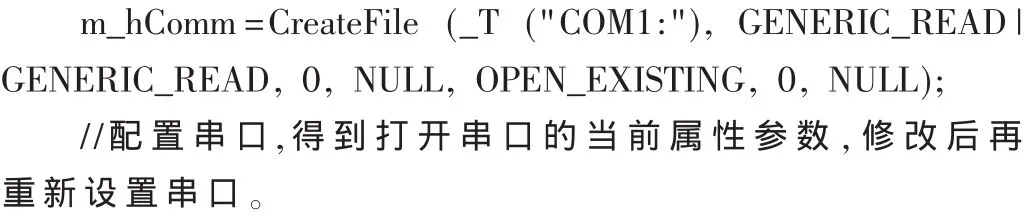
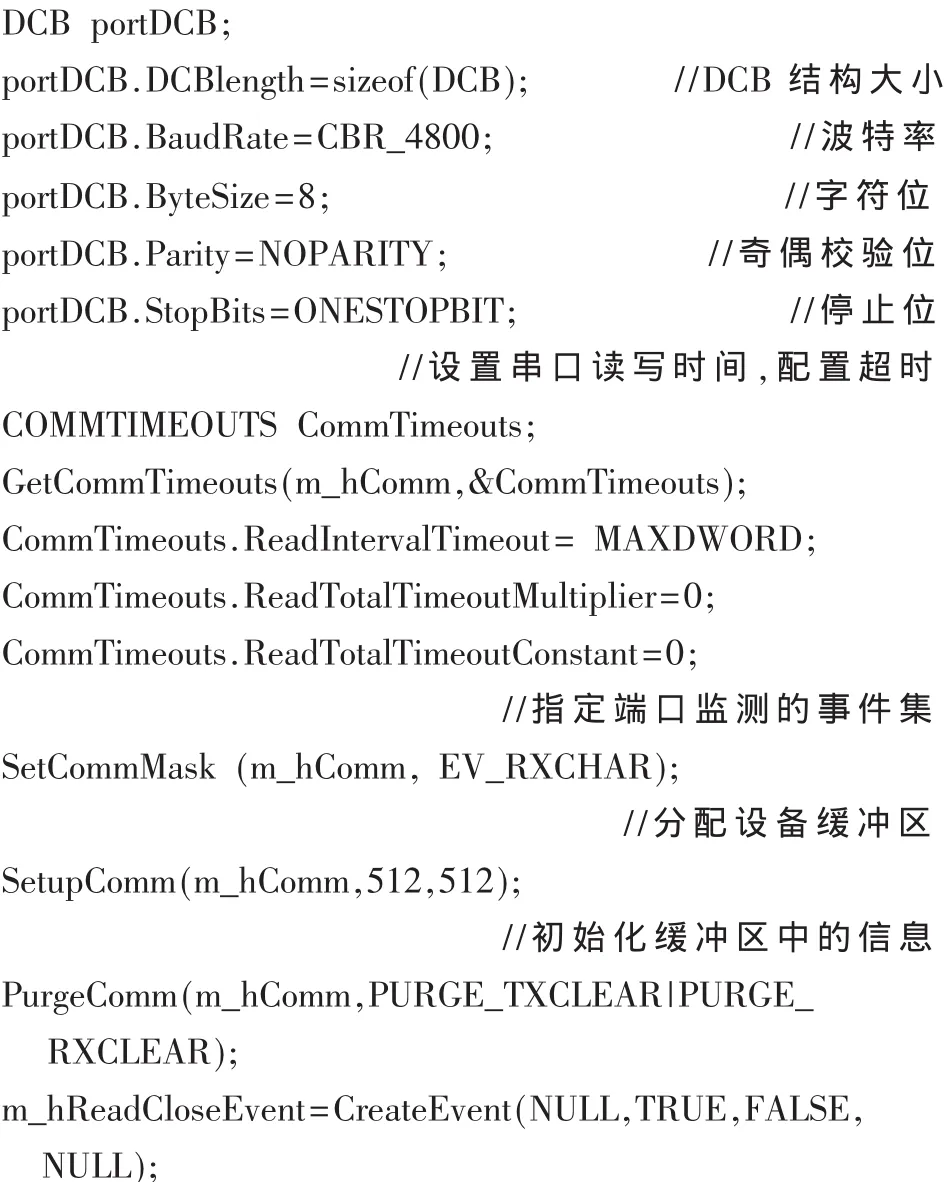
1.3.1 打開并設置通信串口參數
以同步讀取方式打開串口COM1
1.3.2 GPS定位信息的接收
在成功打開并設置通信口后,在主程序中創建線程函數 ReadThreadFunc(LPVOID lparam):
//創建串口接收線程
hRecvThread=CreateThread(0,0,CommRecvTread,this,0,&IDThread);
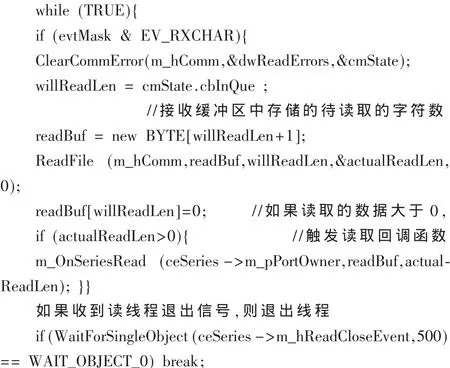
然后在線程函數中采取事件觸發方式進行接收處理,通過等待EV_RXCHAR事件的發生來啟動ReadFile函數完成對GPS定位信息的接收:
2 對導航數據的格式進行處理
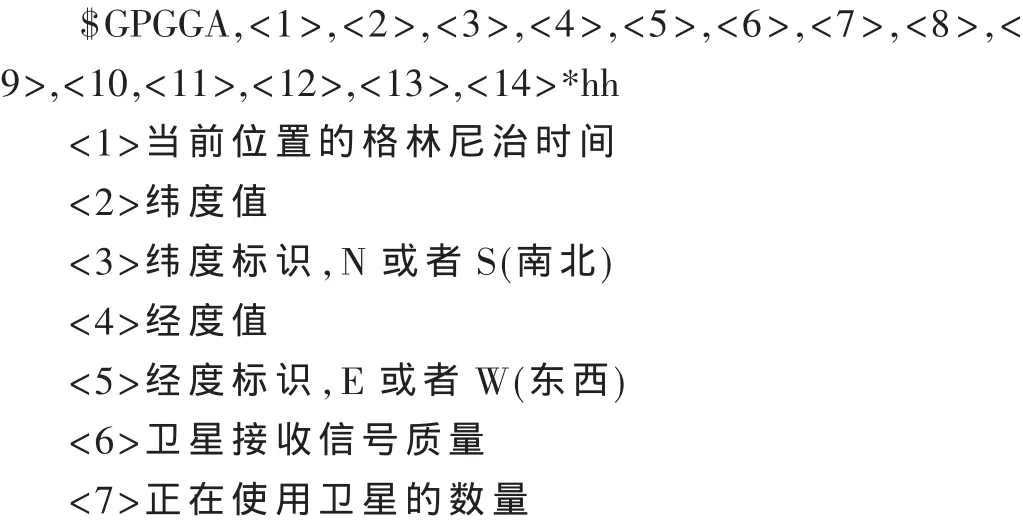
對于實驗中所使用的iQ46240接收芯片,其發送到計算機的數據(采用NEMA0183語句)主要由幀頭、幀尾和幀內數據組成。根據數據幀的不同,幀頭也不相同,主要有“$GPGGA”、“$GPGSA”、“$GPRMC”等。 這些幀頭標識了后續幀內數據的組成結構,各幀均以回車符和換行符作為幀尾識別一幀的結束。本文中,定位數據經緯度、速度、時間等均可以從“$GPGGA”幀中獲取得到。該幀的結構及各字段釋義如下[4]:
2.1 GPS導航數據有效性確認標準
GPS定位的基本原理是根據高速運動衛星的瞬間位置作為已知的起算數據,采用空間距離后方交會的方法確定待測點的位置。假設t時刻在地面待測點安置GPS接收機,可以測定GPS信號到達接收機的時間,加上接收機所接收到的衛星星歷等其他數據可以確定以下4個方程式。衛星定位示意圖如圖3所示。
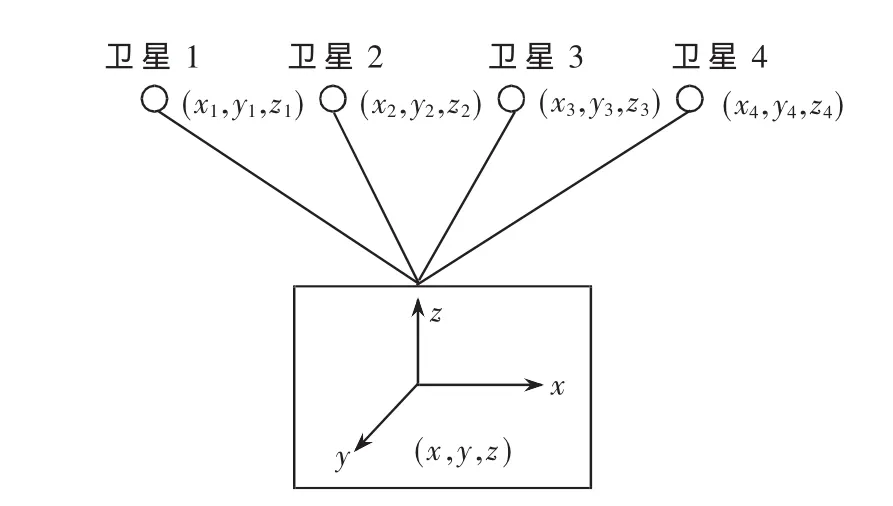
圖3 衛星定位示意圖
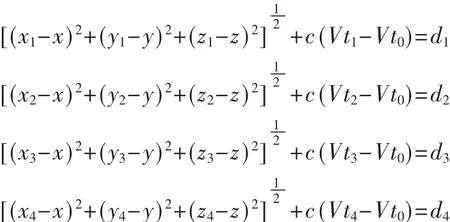
上述 4個方程式中待測點 x、y、z和Δt0為未知參數,其中 dt=c(Δt0=1,2,3,4)分別為衛星 1、2、3、4 到接收機的距離。 Δti(i=1,2,3,4)分別為衛星 1、2、3、4 的信號到達接收機所經歷的時間。c為GPS信號的傳播速度(c為光速)。
xi,yi,zi(i=1,2,3,4)分別代表衛星 1、2、3、4 在 t時刻的空間直角坐標,可由衛星導航電文求得,Vti代表衛星鐘差,Vt0為接收機的鐘差。
由以上4個方程式可計算出待測點的坐標 x、y、z和接收機的鐘差Vt0。因此導航數據能夠有效計算必須保證接收到4個衛星的星歷。對固定格式的導航電碼中提取衛星符號進行確認,如果滿足4個衛星的接收狀態即可確定當前接收的導航電碼可用于數據處理。通常,3顆衛星可以在二維平面上得到經度緯度坐標,為精確起見,4顆衛星可以保證獲得三維空間坐標。
2.2 有效數據提取和數據格式轉化
有效數據的提取和數據格式轉化都是在回調函數中進行的[5]。幀內各數據段由逗號分割,因此在處理緩存數據時,可以通過搜索ASCII碼“$”來判斷是否是幀頭。對幀頭類別進行識別后,再通過對所經歷逗號的個數計數來判斷當前處理的是哪一種定位導航參數,并做相應的處理。eVC支持CString類型格式,由于定位信息格式固定,本文先利用mbstowcs函數將緩存中的字符型數據轉換為寬字符型,然后強制轉化為字符串類型。
WCHAR wszbuf[512];
mbstowcs(wszbuf,(char*)buf,strlen((char*)buf));字符串類型進行處理,然后利用Find函數,搜索"$GPGGA",
strRecv.Find(_T("$GPGGA"),1);state=strRecv.Mid(pos+37,1);得到GPS質量指示指標
strSatelliteNum=strRecv.Mid(pos+39,1);
得到接收到的衛星數量字符,將衛星數量字符型轉化為整型判斷衛星數量是否大于4,作為判斷是否為有效數據的標準。
intiSatelliteNum=atoi ((LPSTR)(LPCTSTR)strSatelliteNum);
當 iSatelliteNum>3&&state==‘1’ 時說明接收到的是有效數據,可對strRecv中的數據進行提取,并賦給經緯度和時間變量。
strLatitude=strRecv.Mid(pos+16,8);strLongitude=strRecv.Mid(pos+27,9);將提取到得經度緯度字符型數據轉化為浮點型數據,通過atof函數實現。
double Longitude_new=(atof(strLongitude))/100;
double Latitude_new=(atof(strLatitude))/100;
這樣將經度緯度信息提取到GPS結構數組中,后續的處理和高層決策可根據該結構中存儲的數據作出相應的處理。
3 程序運行結果分析
程序運行后,在實驗平臺上收集的部分數據如表1所示。
對以上結果分析,可知通過串口在不同時段接收的數據是比較穩定的,能夠以此為基礎提取到有效的數據和定位信息,本系統結合超圖格式(pwr,pmw)的北京市公交站點地圖數據,在編寫程序時調用超圖接口函數打開電子地圖數據,將串口接收到的數據讀入,得到附近的公交站點并以文本方式輸出到界面。
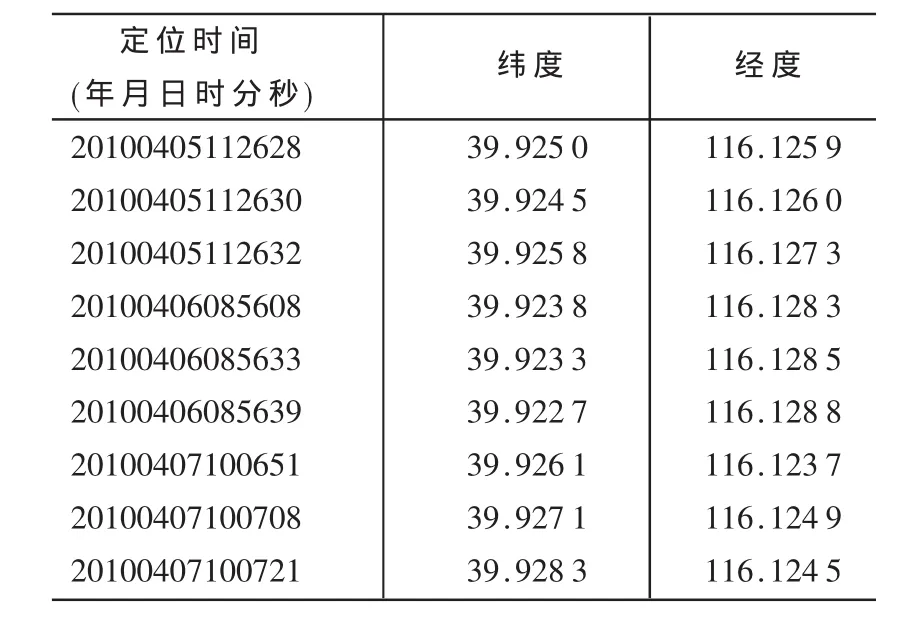
表1 提取到的部分數據
本文結合相關程序代碼陳述了基于eVC環境下串口通信程序的設計,對GPS全球定位系統定位信息的接收和數據提取進行了詳細的分析和討論。主要解決了EVC編程環境下實現串口通信功能、對GPS定位信息的提取和處理的問題。實驗對wince5.0自定義平臺下開發GPS接收裝置給出了代碼樣例供參考,并已應用于智能閱讀器項目中盲用定位模塊。
[1]張文軍.GPS與嵌入式系統軟硬件接口及導航信息提取軟件[J].計算機工程,2005,31(18):210-212.
[2]張冬泉,譚南林,蘇樹強.WindowsCE實用開發技術[M].北京:電子工業出版社,2009.
[3]錢燕,張繼鋒.基于 EVC環境的串口通信程序設計[J].科學技術與工程.2007,7(10):2361-2364.
[4]翟羽佳,張曉林,李宏偉.基于Wince的 GPS導航信息處理軟件的實現[J].電子測量技術.2007,30(10):93-95.
[5]李現勇.Visual c++串口通信技術與工程實踐[M].北京:人民郵電出版社,2004.
猜你喜歡
家庭影院技術(2021年7期)2021-08-14 02:58:44
電子制作(2019年7期)2019-04-25 13:17:14
成都信息工程大學學報(2018年4期)2019-01-23 06:57:18
電子制作(2018年18期)2018-11-14 01:48:16
電子制作(2018年16期)2018-09-26 03:27:18
鐵道通信信號(2018年2期)2018-04-18 12:18:23
制造技術與機床(2017年3期)2017-06-23 08:11:50
電子制作(2017年8期)2017-06-05 09:36:15
電鍍與環保(2016年3期)2017-01-20 08:15:32
單片機與嵌入式系統應用(2014年9期)2014-03-11 15:35:13