6-PRRS并聯機器人的小腦模型神經網絡控制*
2010-05-18 07:28:12楊永剛任淑艷劉玉斌
網絡安全與數據管理 2010年19期
楊永剛 ,任淑艷 ,劉玉斌
(1.中國民航大學,天津 300300;2.天津工程師范學院,天津 300222;3.哈爾濱工業大學 機器人研究所,黑龍江 哈爾濱 150080)
由于并聯機器人的結構特點,6自由度并聯機器人控制系統是一個非線性、強耦合、變參數的多變量系統。在運動過程中,機器人處于不同位置或以不同的加速度運動時,作用在各個分支上的負載將在一定的范圍內作非線性變化。此外,由于并聯結構由多個連桿連接末端平臺組成,各通道的輸出相互影響,導致相互耦合。對于高精度控制系統來說,未建模的非線性摩擦對系統的性能影響十分不利,通常都采用基于模型的方法實現非線性摩擦的補償以達到較高的系統控制性能。甚至在一些自適應控制系統中,也需要一個精確的初始非線性摩擦模型來保證良好的控制品質和參數的快速收斂。但在實際的工程條件下,獲得并聯機器人近似精確的非線性摩擦模型并不容易。研究解決非線性、變負載、交聯耦合和摩擦干擾的控制策略是高精度6自由度并聯機器人應用中的一個重要環節。目前,國內對6自由度并聯機器人控制采用的策略主要有:PID控制[1]、神經網絡控制[2]、自適應魯棒控制[3]等,并取得了一定的成果。與國內相比,國外對6自由度并聯機器人的研究較早,成果也較多。Park等采用帶有干擾觀測器的滑模控制器對6自由度的并聯機器人進行了控制[4],Honegger等采用非線性自適應控制器對6自由度的并聯機器人進行控制[5],此外基于模型的動力學控制、預測控制等也都在并聯機器人控制上得到了應用。本文采用分散控制策略,即在關節空間中,應用小腦模型神經網絡(CMAC)結合 PID的控制方式,對并聯機器人每個支鏈單獨控制,將各支鏈之間的相互耦合,視作干擾進行補償,實現6-PRRS并聯機器人高精度軌跡跟蹤,并進行了仿真驗證。
1 6-PRRS并聯機器人運動學分析
1.1 6-PRRS并聯機器人的機械結構
6-PRRS并聯機器人沿導軌方向具有較大的工作空間,部分地解決了并聯機器人工作空間較小的矛盾,其結構如圖1所示。由運動平臺通過6根固定長度的桿件分別連接到沿3根導軌運動的滑塊上,滑塊通過絲杠傳遞由伺服電機驅動,電機固定在絲杠的一側,通過柔性聯軸器與絲杠相聯接,滑塊與桿件之間采用虎克鉸連接方式,桿件通過一旋轉副加虎克鉸方式與動平臺相連接。為增大工作空間,減少運動干涉,設計時中間絲杠在位置上略低于兩邊絲杠。動平臺的空間期望軌跡通過改變滑塊的位置來實現。

圖1 6-PRRS結構簡圖
1.2 6-PRRS并聯機器人的運動學逆解
在基座和動平臺上分別建立固定坐標系{Ob-xbybzb}和可動坐標系{Op-xpypzp},其坐標原點分別位于兩者的中心B和P。根據并聯機器人位置與姿態的描述與空間變換理論,可以得到:

式中Pi表示連桿與動平臺連接點在坐標系{Ob-xbybzb}中的坐標矢量,記為:

P′i點表示 Pi在坐標系{Op-xpypzp}中的坐標矢量,記為:

矩陣T為可動坐標系對固定坐標系平移和旋轉后的齊次坐標變換矩陣。值為:
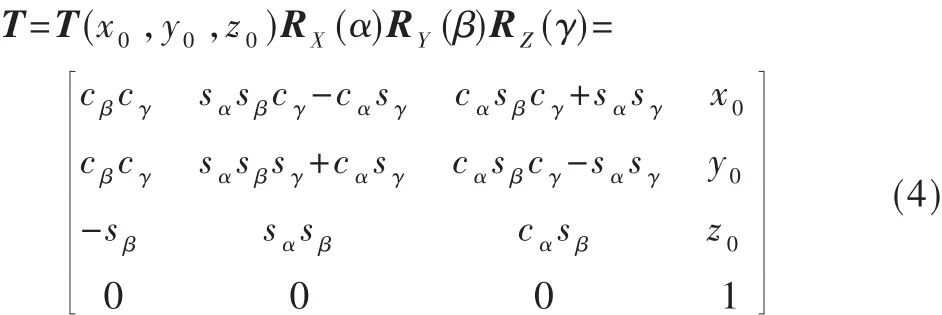
式(4)表示在固定坐標系下,可動坐標系先繞z軸旋轉γ角,再繞y軸旋轉β角,再繞 x軸旋轉α角,最后沿x、y、z軸平移 x0、y0、z0所得到的相對于固定坐標系的齊次變換矩陣。
P′i可由機構尺寸直接求得,當給出動平臺相對于固定坐標系的位置(x0,y0,z0)和姿態(α,β,γ)后,Pi由式(1)可求。
設滑塊在固定坐標系下中心點Bi的坐標為:

因為滑塊只能沿絲杠方向運動,所以 Biy、Biz為常量,由并聯機器人的結構確定。根據矢量關系可得:

式中l為桿長,整理得:

式(7)即為并聯機器人的位置逆解。當給定動平臺的位姿,可由上式求出6個滑塊的位置逆解。上式也可表示為:

對上式兩端進行時間微分,可得:

簡記為:

式中[J]6×6即為并聯機器人的運動學雅可比矩陣,也稱為運動影響系數,是與并聯機器人幾何位置有關的量。
2 控制器的設計
生理學的研究表明:小腦在人體運動中,起到維持軀體平衡、調節肌肉緊張程度、協調隨意運動等功能。因此,模擬人的小腦結構與功能無疑是腦的宏觀結構功能模擬的重要組成部分。1975年Albus根據神經生理學小腦皮層結構特點,提出了一種小腦模型關聯控制器CMAC網絡[6](Cerebellum Model Articulation Controller)。小腦模型神經網絡CMAC(Cerebellar Model Articulation Controller)是一種表達復雜非線性函數的表格查詢型自適應神經網絡,該網絡可通過學習算法改變表格的內容,具有信息分類存儲的能力。本文采用CMAC和PD的復合控制實現前饋反饋控制,利用CMAC實現前饋控制,實現被控對象的逆動態模型與PID控制器實現反饋控制,保證系統的穩定性,且抑制擾動,結構如圖2所示。
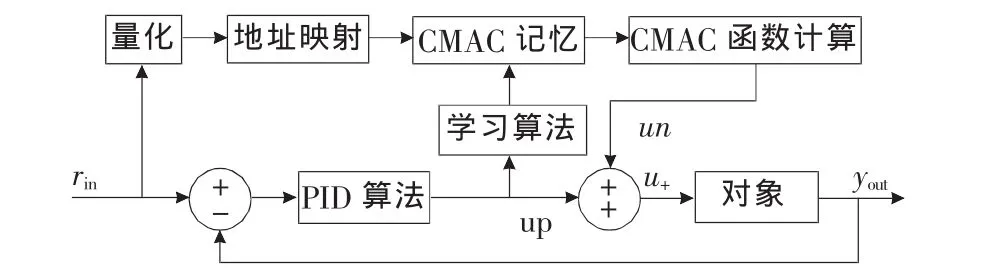
圖2 CMAC與PD復合控制結構圖
CMAC采用有導師的學習算法。每一控制周期結束時,計算出相應的 CMAC輸出 un(k),并與總控制輸入 u(k)相比較,修正權重,進入學習進程。學習的目的是使總控制輸入與CMAC的輸出之差最小。經過CMAC的學習,使系統的總控制輸出由CMAC產生。而常規控制器采用傳統的PD算法而不用PID控制算法,使CMAC的學習僅僅依賴于誤差的當時測量值及變化值。該系統的控制算法為:



式中,aj為二進制選擇向量;c為CMAC網絡的泛化參數;un(k)為CMAC產生相應的輸出;up(k)為常規控制器PID產生的輸出。CMAC的調整指標為:


式中,η為網絡學習速率,η∈(0,1);α0為慣性量,α0∈(0,1)。
3 仿真實驗結果及分析
6-PRRS并聯機器人的單軸傳遞函數可簡化為二階傳遞函數:

CMAC 神經網絡參數取 N=50,c=8,η=0.03,α0=0.04。 PID 控制參數取 Kp=3.7,Ki=0,Kd=0.056 7,對 6-PRRS并聯機器人進行仿真實驗分析,當系統輸入為r(t)=sin(t),并施加擾動 d=0.5sgn(cos(0.5t))時,仿真結果如圖3所示。
對比傳統PD作用下的正弦波響應,在施加同樣負載擾動的情況下,6-PRRS并聯機器人系統的輸出與誤差如圖4所示。
在加入干擾的情況下,會發現由于CMAC的加入使得干擾作用下的控制誤差明顯減小,顯示了較好的控制效果。CMAC與PD控制器并行控制在一定程度上克服了常規控制器所不能避免的一些弊端,使控制效果得到提高。
本文采用采用小腦模型神經網絡與PID相結合的神經網絡控制器利用分散控制策略對6-PRRS并聯機器人進行了軌跡跟蹤控制。仿真實驗結果表明該控制器可以實現動力學耦合及其他未知外擾的補償,具有強魯棒性和良好的軌跡跟蹤性能。該控制器結構簡單,執行速度快,易于工程實現。
[1]蘇玉鑫,段寶巖,等.并聯機器人的非線性 PID控制[J].控制與決策,2003,18(4):490-493.
[2]萬亞民,王孫安,杜海峰.液壓并聯機器人的動態神經網絡控制研究 [J].西安交通大學學報,2004,38(9):955-958.
[3]焦曉紅,耿秋實,等.液壓伺服并聯機器人的自適應魯棒跟蹤控制[J].系統仿真學報,2003,15(3):401-403.
[4]PARK M K,LEE M C,et al.The design of sliding mode controller with perturbation observer for a 6-DOF parallel manipulator[A].Korea,2001.
[5]HONEGGER M,BREGA R,SCHWEITZER G.Application of a nonlinear adaptive controller to a 6 DOF parallel manipulator[A].International Conf.on Robotics&Automation[C], San Francisco, 2000.
[6]ALBUS J S.A new approach to manipulator control:The Cerebellar Model Articulation Controller (CMAC)[J].Journal of Dynamic Systems, Measurement and Control, 1975,97(3):220-227.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
哲學評論(2021年2期)2021-08-22 01:53:34
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
現代企業(2015年9期)2015-02-28 18:56:50
