一種多功能電液動輪椅的設計
2010-06-22 06:37:20陳立東劉勝韜鄭俊玲李國昉馬淑英
北京聯(lián)合大學學報 2010年1期
陳立東,劉勝韜,鄭俊玲,李國昉,石 磊,馬淑英,王 懂
(河北科技師范學院1.機電工程學院;2.歐美學院,河北 秦皇島 066600)
隨著社會的發(fā)展和人類文明程度的提高,人們特別是身有殘障的社會成員愈來愈需要運用現(xiàn)代高新技術來提升他們的生活質(zhì)量和生活自由度。據(jù)調(diào)查,因為各種交通事故、天災人禍和種種疾病,每年均有成千上萬的人喪失一種或多種能力(如行走、動手能力等)。目前,我國65歲以上的老年人和需要使用輪椅的殘疾人有一億人以上,而且社會的老齡化程度還在不斷提高。因此,如何利用現(xiàn)代技術來擴大殘疾人和老年人的生活空間、提高他們的生活質(zhì)量,給他們帶來更多的自由和方便成為近幾年來國際學術界和企業(yè)界關注的熱點。輪椅作為殘疾人和行動不便的老年人的代步工具,越來越受到市場的歡迎。但目前,市場上的輪椅要么結構簡單、功能單一,安全性、機動性差,要么價格昂貴、經(jīng)濟性差,普通家庭購買不起。這就要求國內(nèi)生產(chǎn)的電動輪椅不僅實用性要強,價格也要便宜。國內(nèi)一些生產(chǎn)廠家和科研院所對電動輪椅做了一定的研究,但與國外相比還很不完善。為此,本文研制了一種適合我國國情的具有速度控制、高度調(diào)節(jié)及靠背角度調(diào)整的多功能電液動輪椅。
1 基本結構
輪椅主要由輪椅座位提升系統(tǒng)、電機驅動系統(tǒng)、靠背傾角調(diào)節(jié)裝置、調(diào)速與制動系統(tǒng)、轉向機構、單片機控制系統(tǒng)和前后輪等組成,其框架采用四點支撐立體結構,材料使用高強度不銹鋼管,可以提高輪椅的剛度和強度,基本結構如圖1所示。
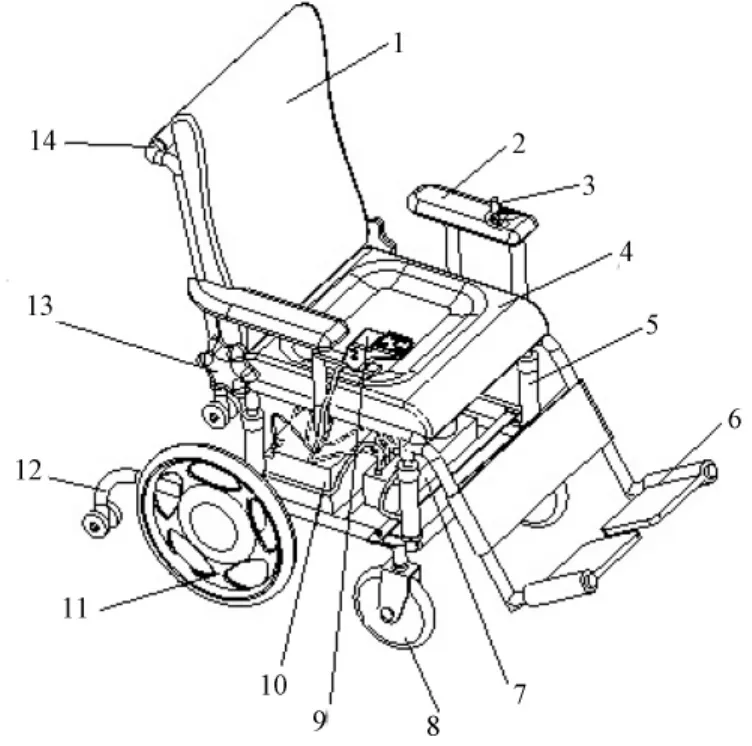
圖1 多功能輪椅基本結構
2 主要部件的設計
2.1 輪椅座位提升系統(tǒng)
輪椅座位提升系統(tǒng)主要是用來調(diào)整輪椅座位的高度。當乘用人需要抬高身體去拿高處物品時,可以通過操縱輪椅座位升降開關來控制液壓泵工作,使前后四個支腿液壓缸工作,提高座位高度。輪椅座位提升系統(tǒng)主要由電源開關、電磁控制開關、液壓缸、溢流閥、分流閥及管路等組成[1-3],其系統(tǒng)原理如圖2所示。
輪椅座位提升系統(tǒng)由一個三位四通電磁換向閥控制其工作狀態(tài),當電磁換向閥處于左位時,液壓泵的壓力油經(jīng)過電磁換向閥的左位,經(jīng)節(jié)流閥到前排分流閥和后排分流閥,然后分別供給前排和后排液壓缸。設置分流閥的目的是使前后四個液壓缸提升平穩(wěn)且同步性好。當?shù)竭_指定高度時,使電磁換向閥處于中位即可切斷油路,座位停止在指定位置。當需要降低座位時,只需使電磁換向閥右位接通,即可控制液壓缸縮回,座位回落。此外,在回油路上設置了一個單向閥,起背壓閥的作用,可以改善座位回落時的平穩(wěn)性。座位最高可以升高42 cm,能夠滿足一般高度拿取東西時的需要。

圖2 輪椅座位提升系統(tǒng)液壓原理圖
2.2 電機驅動控制系統(tǒng)
電機驅動控制系統(tǒng)由48 V直流電源(4塊蓄電池)、速度手柄位置開關、單片機、功率驅動及功率開關電路、速度/電流檢測電路、直流無刷輪邊驅動電機等組成,其驅動控制原理如圖3所示。功率開關電路由6個功率晶體管構成三相全橋逆變電路,把直流電壓轉化為交流電壓,驅動電機運轉。功率驅動電路把單片機輸出的0~5 V的電平控制信號,進行功率放大,轉換到0~15 V,用來控制功率開關電路中的功率晶體管。速度/電流檢測電路采集速度、電流的反饋信號。
2.2.1 驅動電機的選擇
驅動電機選擇直流無刷電機,與輪椅后輪做成一體,其特點是啟動和爬坡力矩大,使用可靠,維護簡單。無刷直流驅動電機輪由電機本體、車輪、轉子位置傳感器、功率開關電路組成,其額定電壓為48 V,額定功率250 W。
2.2.2 控制系統(tǒng)的原理
單片機接收速度控制手柄給定的速度信號,并根據(jù)電流、速度的反饋調(diào)整輸出的PWM信號的占空比,控制電機轉子的轉速。
無刷電機內(nèi)部的霍爾元件的輸出信號經(jīng)過位置信號檢測電路,將電機轉子的當前位傳遞給單片機,單片機根據(jù)此信號計算出電機的轉速,同時輸出對應的換相信號。驅動電路根據(jù)單片機的輸出指令,控制三相橋功率開關電路上下功率管的導通順序和導通時間,從而實現(xiàn)對無刷電機的轉速調(diào)節(jié)。
單片機采用 ATmega103,具有更快的處理速度,具有更低的功耗,可以使蓄電池工作時間更長。該單片機具有獨立的PWM輸出口,可以更靈活地控制PWM的占空比的輸出,內(nèi)置10位的A/D轉換器,8位 PWM發(fā)生器,具有很高的分辨率,使編程更為簡單,采用FQFP64腳的封裝,占用更小的電路板空間,可以利用JTAG進行在線調(diào)試,還可以利用ISP進行程序的下載,多個中斷向量使程序控制更為及時、有效,具有穩(wěn)定性好、抗干擾性及靈活性完善的特點。
2.2.3 系統(tǒng)硬件設計
整個系統(tǒng)主要包括轉子位置檢測電路、測速電路、調(diào)速電路、全橋電路、限流電路等。其中,無刷直流電機由電動機本體、轉子位置檢測器和電子開關電路三部分組成[4]。直流電源通過開關電路向電動機定子繞組供電,位置檢測器可隨時檢測轉子的位置,并根據(jù)轉子的位置信號來控制開關管的導通和截止,從而實現(xiàn)電子換向。
單片機控制系統(tǒng)硬件連接如圖4所示,AT-mega103單片機接收ADC0809轉換后的數(shù)字信號以及剎車、加速、減速按鈕的信號,以此決定PB口的輸出、控制PWM的占空比的輸出,進而來進行速度控制、速度顯示燈發(fā)光的個數(shù)控制等。
2.2.4 系統(tǒng)軟件設計
ATmega103在軟件上能有效地支持C語言及匯編語言。目前,匯編語言是嵌入式系統(tǒng)設計的通用語言,它既有模塊化編程、可讀性好、維護方便的特點,又具有對硬件訪問方便、代碼效率高的特點[5]。本設計采用匯編語言編程實現(xiàn),具有很好的通用性,其程序流程圖如圖5所示。
設置ADC0809的端口地址為0FH,IN0號模擬輸入通道接電池電壓信號,IN1號模擬輸入通道接電機電樞電流信號,IN2號模擬輸入通道接電機轉速信號。設置PWM的端口地址為0EH。
Atmega103的PB口輸出PWM控制信號,由PF口輸入ADC0809轉換后的數(shù)字信號。PC.0口接剎車按鈕,PC.1口接加速按鈕,PC.2口接減速按鈕,PC.3口接啟動按鈕。
2.3 轉向機構的設計
轉向機構主要采用機械傳動,如圖6所示。當乘坐者轉動操控手柄1時,傳動桿2受扭矩發(fā)生轉動,通過滑塊4將力和運動傳動給連桿5,使桿5產(chǎn)生左右運動,從而帶動前輪6左右轉動。這樣,方向控制功能就實現(xiàn)了。其中,支架3起定位作用,以防止傳動桿2在傳遞扭矩的過程中產(chǎn)生彎曲變形。

圖6 轉向機構圖
3 附加裝置設計
3.1 防后翻倒裝置
為防止輪椅因坡度過大,途遇障礙物或使用者坐姿錯誤等原因造成的輪椅突然向后傾倒現(xiàn)象的發(fā)生,本輪椅加設了防后翻倒裝置。具體結構如圖7所示。

圖7 座椅防后翻裝置
3.2 背椅角度調(diào)節(jié)裝置
為了滿足不同使用者的身體狀況需求,提高使用者乘坐時的舒適性,加設了此裝置。為實現(xiàn)此功能,該輪椅采用了當前被廣泛使用的調(diào)角器。調(diào)角器中具有能實現(xiàn)鎖止和解鎖功能并調(diào)節(jié)角度的部件。該部件可與不同的連接板連接而組成不同的調(diào)角器,以適用于不同結構的座椅。
4 結論
該輪椅結構緊湊,裝配簡單,能夠實現(xiàn)批量生產(chǎn),與同類產(chǎn)品相比,具有較高的性價比且操作便捷,適合老年人和殘疾人使用;結合使用電機驅動系統(tǒng)、液壓調(diào)整系統(tǒng)和相關機械零件可以實現(xiàn)自動行駛;手動轉向、制動及輪椅靠背傾斜角度的調(diào)整,其獨特之處在于能在一定高度范圍內(nèi)自由調(diào)整輪椅高度并自鎖,保證安全,另外實現(xiàn)了手動自由變速且操作簡單;該輪椅的最高時速有待試驗確定,座椅的升降高度需要進一步進行市場調(diào)查研究。
[1]齊曉杰.汽車液壓與氣壓傳動[M].北京:機械工業(yè)出版社,2008.
[2]吳振順.液壓控制系統(tǒng)[M].北京:高等教育出版社,2008.
[3]劉延俊,關浩,周德繁.液壓與氣壓傳動[M].北京:高等教育出版社,2007.
[4]于軍琪,陳登峰,何波.單片機原理及應用[M].北京:中國電力出版社,2008.
[5]周堅.單片機項目教程[M].北京:北京航空航天大學出版社,2008.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45