立式電機機座的動態性能仿真研究
2010-07-02 03:28:28毛文貴李建華傅彩明
大電機技術 2010年3期
毛文貴,李建華,傅彩明
( 湖南工程學院 機械工程學院, 湖南 湘潭 411101)
前言
機械結構動態設計分為結構振動特性設計及結構振動響應設計,而結構振動特性設計的核心是結構模態分析[1]。多自由度系統振動時,同時有多階模態存在,每階振動模態可用一組模態參數來確定,通常模態參數包括固有頻率、固有振型、模態質量、模態剛度和模態阻尼比等。其中最重要的是頻率、振型和阻尼比,對于無阻尼系統就是固有頻率和振型。模態參數有著重要的意義,因為它將表明在哪幾種頻率下結構會產生共振以及在各階頻率下結構的相對變形,對于改善結構動態特性,這是最重要的基本參數。模態分析方法目前主要有3種:解析法、模態實驗法和有限元法[2]。隨著計算機技術的不斷發展,利用有限元技術進行模態分析已得到越來越多的應用。
在電機性能中,振動和噪聲是電機重要的技術指標。振動是產生噪聲的主要因素之一,而電機的振動幅值及機座的聲發射又與機座的固有頻率和固有模態等機械振動特性有關,因此對電機的固有頻率和固有模態進行精確計算是十分重要的[3,4]。本文利用有限元方法對電機機座進行瞬態分析和振動分析。
1 機座的載荷與邊界條件
1.1 載荷情況
電機在運行過程中,機座主要承受下列載荷:
(1)重力載荷:對于立式電機,除了承受機座本身的重力外,還要承受機組轉動部分的重量。
(2)軸向力:主要為水泵的軸向推力。
(3)轉矩:包括工作轉矩以及負載突然變化或電機突然短路時的靜態電磁轉矩。
(4)徑向力:主要是電磁徑向分力、單邊磁拉力和由鐵心熱膨脹引起的徑向力。本分析忽略鐵心熱膨脹,主要考慮電磁徑向分力和單邊磁拉力。重力、軸向力和轉矩可以根據電機結構參數和工作參數直接查出,而徑向力則需根據相關公式進行計算。
電機定、轉子存在氣隙,在磁場的作用下產生電磁力。電磁力的切向分量形成驅動轉矩,而徑向分量則作用在定、轉子的鐵心表面上,使定、轉子產生壓縮變形,從而引起電機的振動。對于考慮電磁主波磁場產生的徑向力,可由下式計算[5]:


考慮其靜態值,則

其中:Bδ為氣隙磁密系數,0.8T;0μ為真空磁導率,4πe-7。
電機運行過程中產生單邊磁拉力的主要原因是轉子相對于定子偏心,而這通常可由加工和安裝誤差、軸承磨損、轉子撓度等引起。分析中把它簡化為以均布載荷形式在電機機座的一半內圓柱表面以及相對應的轉子鐵心外表面。其值可由下式進行計算:

式中:β為經驗系數,對于感應電機取值為:0.3;D為轉子鐵心外徑,1415mm;lef為鐵心總長度,取值為:850mm;Bδ為氣隙磁密系數,0.8T;δ為單邊平均氣隙,2.5mm;μ0為真空磁導率,為4πe-7;e0取值為0.1×δ。
1.2 機座的邊界條件
機座通過地腳螺栓與地面聯接。分析時作固定約束來模擬地腳螺栓聯接。
2 機座瞬態分析計算
考慮電機單邊磁拉力的影響,進行瞬態分析,得到機座各部分變形情況如圖1所示。
此外,不考慮單邊磁拉力的影響,進行瞬態分析。分析結果見表1:
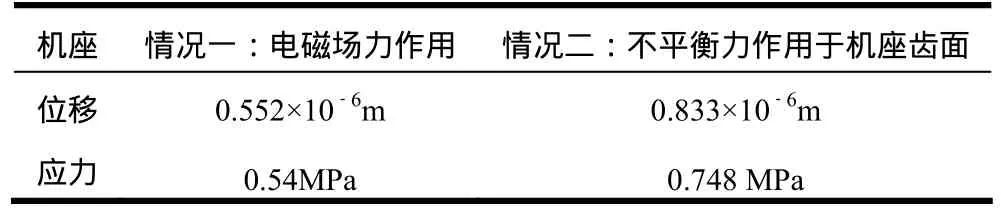
表1 瞬態分析結果
應用有限元技術,進行立式電機機座的瞬態響應分析,可得:考慮動態載荷,進行強度、剛度分析,應力、變形都遠小于設計值,說明結構的設計滿足動態強度和剛度要求。通過單邊磁拉力的作用對比,可以看出不平衡力對結構的響應影響不大。
3 機座振動分析
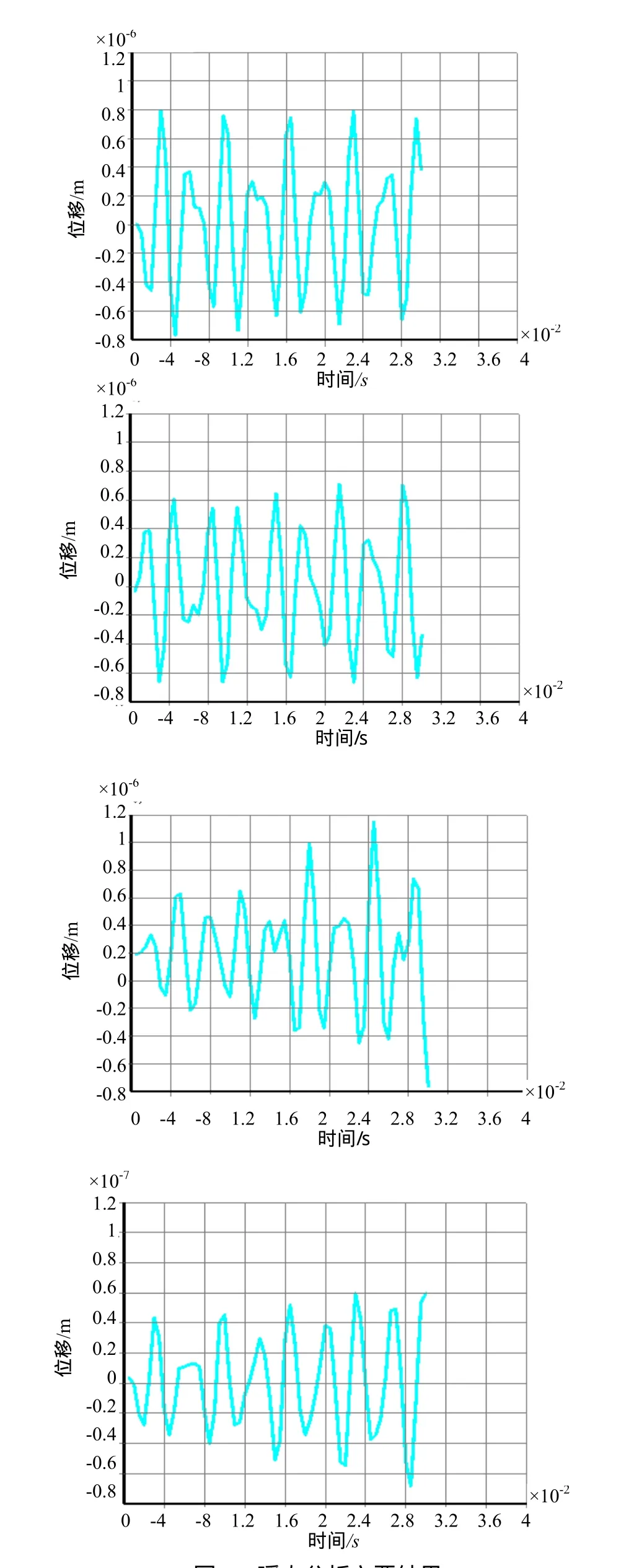
圖1 瞬態分析主要結果
產生電機振動的原因是多方面的,但歸納起來主要表現為兩種形式:一種是機械振動;另一種是電磁振動。機械振動主要是由于加工、裝配、磨損等原因造成的,通過提高加工精度、進行動平衡校正等方法可以降低機械振動的發生。而電磁振動則是由感應電機氣隙磁場作用于電機鐵心產生的電磁力所激發。振動的頻率就是力波作用的頻率。而鐵心、機座和轉子都有一定的固有振動頻率,當徑向力波的頻率與該固有頻率接近甚至相同時,會發生諧振。
3.1 電磁振動的力波分析
產生電磁振動的徑向力波的次數越低,鐵心彎曲變形的相鄰兩支點間的距離越遠,鐵心剛度相對較差,徑向變形也越大。鐵心變形量約與力波次數的四次方成反比,與力波幅值成正比,故幅值較大的低次徑向力波是電磁振動的主要根源。在實際應用中,一般只要考慮由主波磁場產生的徑向力以及由機座和轉子諧波磁場產生的徑向力[6]。
主波磁場產生的徑向力的力波頻率計算式為:

機座和轉子諧波磁場產生的徑向力的力波頻率計算公式為:

和

其中: f1為電源頻率,50Hz;k2=±1,±2,…;z2為轉子槽數,132;p為電機極對數,8;s為電機額定轉差率,0.01。
根據上述三式進行計算,得電磁力波的主要振動頻率為:100、816.75、916.75等。
3.2 機座自由模態分析
機座是電機中直接承受電磁力作用且容易產生振動的部分,應用虛擬樣機技術和有限元仿真研究方法[7]對機座進行模態仿真,獲得機座的固有頻率和振型參數。
3.2.1 模態分析結果
對機座實體模型用邊長為99mm的四面體單元進行有限元網格劃分,得到單元 54894,節點 106012,施加與靜力分析相同的約束條件,設置材料參數,去除外載荷,進行機座前十階自由模態分析。其中,前六階振型位移云圖如圖2所示。
對振型圖進行分析,模態分析主要結果見2。
3.2.2 底座固定對機座固有頻率的影響
電機依靠機座底端的地腳螺栓與地面聯接,螺栓的聯接情況直接影響到電機的固有振動頻率,為了具體體現影響效果,分別考慮4個、6個、8個、12個螺栓進行緊固聯接約束,進行機座的固有頻率有限元計算,前六階固有頻率見表3。
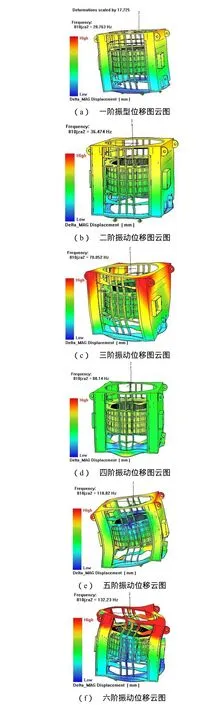
圖2 機座模態振動位移云圖
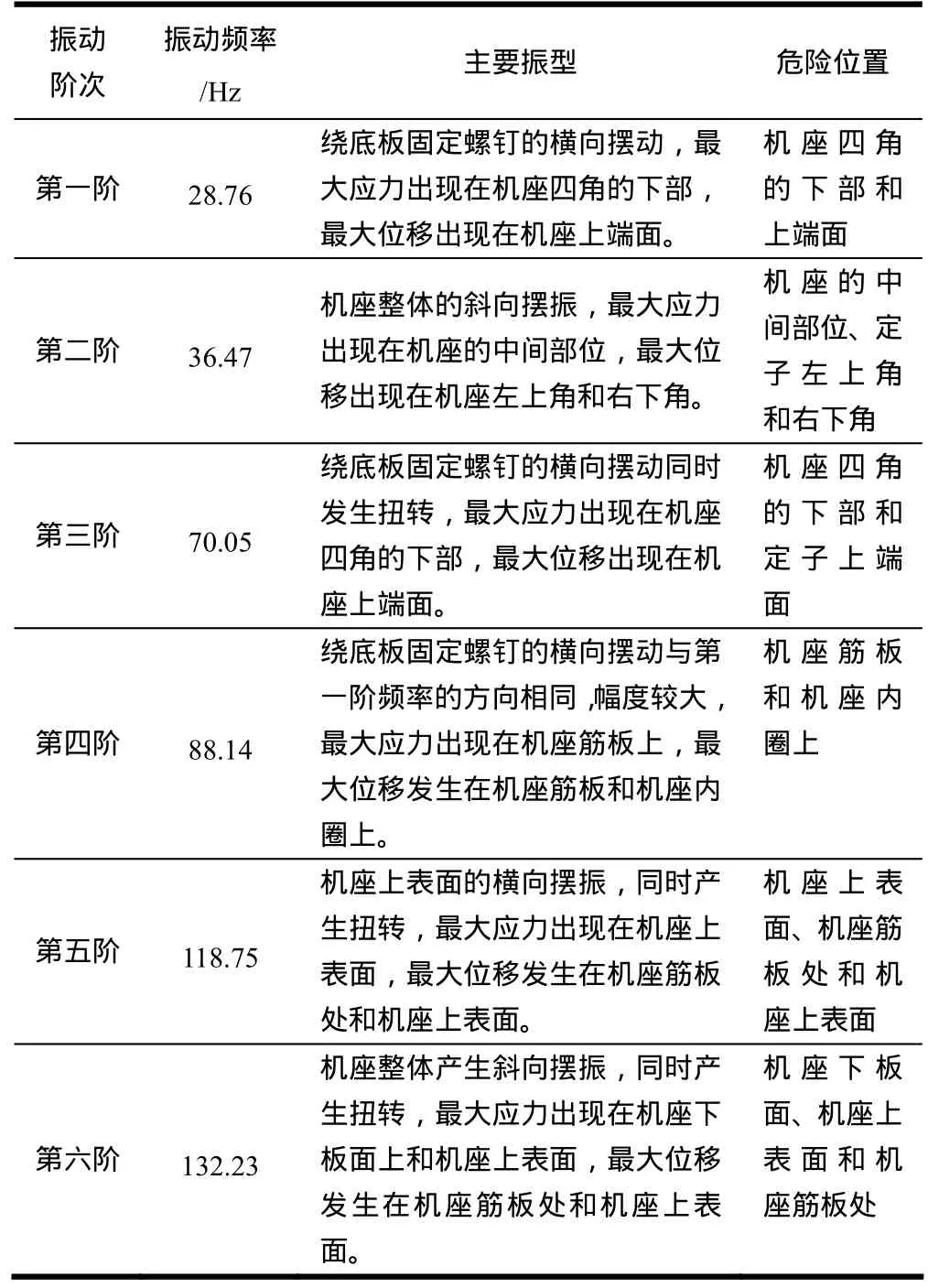
表2 模態分析主要結果
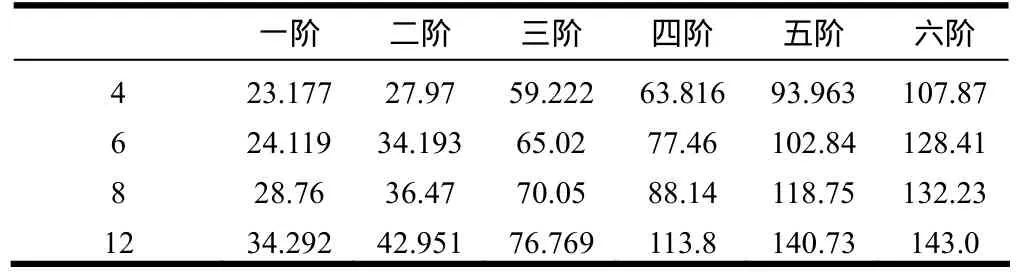
表3 不同約束螺栓數的固有頻率
4 結論
應用有限元技術,進行立式電機機座的瞬態響應分析和振動分析,結論如下:
(1)考慮動態載荷,進行強度、剛度分析,應力、變形都遠小于設計值,說明結構的設計滿足動態強度和剛度要求。
(2)通過單邊磁拉力的作用對比,可以看出不平衡力對結構的響應影響不大。
(3)在正常工作條件下,電機機座的固有振動頻率與激振頻率相差 10%以上,因此,在電機的穩定運行中,不存在共振問題。
(4)地腳螺栓的聯接對固有頻率有較大的影響,當螺栓組中出現某些螺栓失效時,將有可能引發共振。
(5)由于激振頻率處于機座的某兩階固有頻率之間,增大地腳螺栓數目對振動并無明顯改善。
(6)模態的危險位置主要發生在機座上端,特別是上端的四個角。因此,機座四角的四塊彎板要有足夠的剛度。
[1]陳超, 趙淳生. 旋轉型行波超聲電機機座的子結構模型研究[J].振動工程學報,2005,18(2):238-242.
[2]李東東,陳陳. 風力發電機組動態模型研究[J]. 中國電機工程學報,2005,25(3):115-118.
[3]王宏華,王治平,江泉.開關型磁阻電動機固有頻率解析計算[J].中國電機工程學報,2005,12(25):135-139.
[4]溫熙森, 陳循, 徐永成. 機械系統建模與動態分析 [M]. 科學出版社, 2004.
[5]陳世坤.電機設計[M]. 北京: 機械工業出版社,2004.
[6]黃國治, 傅豐禮. Y2系列三相異步電動機技術手冊[M]. 機械工業出版社, 2004.
[7]謝衛,郝英,王亞靜. 無刷直流推進電動機動態性能的仿真[J]. 中國航海, 2005,(2):70-72.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
天天愛科學(2020年6期)2020-09-10 07:22:44
電子制作(2018年18期)2018-11-14 01:48:24
數學物理學報(2017年6期)2018-01-22 02:26:40
山東工業技術(2016年15期)2016-12-01 05:31:22
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44
計算物理(2014年2期)2014-03-11 17:01:39