基于TMS320F2812的遠程故障檢測系統設計
2010-07-10 07:01:16王徐穎陳鑫焱
制造業自動化 2010年6期
龔 民,王徐穎,陳鑫焱
(沈陽理工大學 機械工程學院, 沈陽 110168)
0 引言
以單片微控制器為核心的故障檢測系統中,由于單片機處理數據速度的有限性和人們對故障檢測系統各個方面的要求的不斷提升這個矛盾日益顯現出來。隨著采用DSP的應用領域的愈來愈多,DSP在原有檢測系統上的應用為提高系統性能成為了可能。
DSP作為數字化時代的基因芯片,主要在三個方面的特點支持了其在數據處理方面的高速性。DSP處理器使用專門的硬件實現單周期乘法,支持密集的乘法運算,單片機則要求多個指令周期來做一次乘法;DSP 采用哈佛結構,程序和數據空間分開,DSP在一個機器周期內可以同時準備好指令和操作數,單片機一般無法完成該任務;DSP采用零開銷循環,執行循環時,無需花時間去檢查循環計數器的值,僅當條件轉移到循環的頂部時將循環計數器減1。MCU和DSP相比,低檔的MCU的指令周期為600ns,乘法計算時間為1900ns,而低檔的DSP指令周期和乘法計算時間均只需50ns。高檔的MCU的指令周期為也需40ns,乘法計算時間需80ns。而高檔的DSP指令周期和乘法計算時間均只需5ns,DSP在運算速度上的優勢是顯而易見的[1]。
1 信號處理模塊設計
1.1 信號處理模塊設計原理與組成
本信號處理模塊主要由電源模塊、DSP(TMS320F2812)模塊、數據交換模塊、MCU(89C52)模塊等幾部分組成。MCU獲取故障現場數據后將數據傳輸給雙口RAM,TMS320F2812得到數據后進行快速算法運算,運算得到的結果再通過雙口RAM傳送給MCU。以該模塊在滾動軸承故障檢測系統中的應用為例,應用DSP后的故障檢測系統框圖如圖1所示。
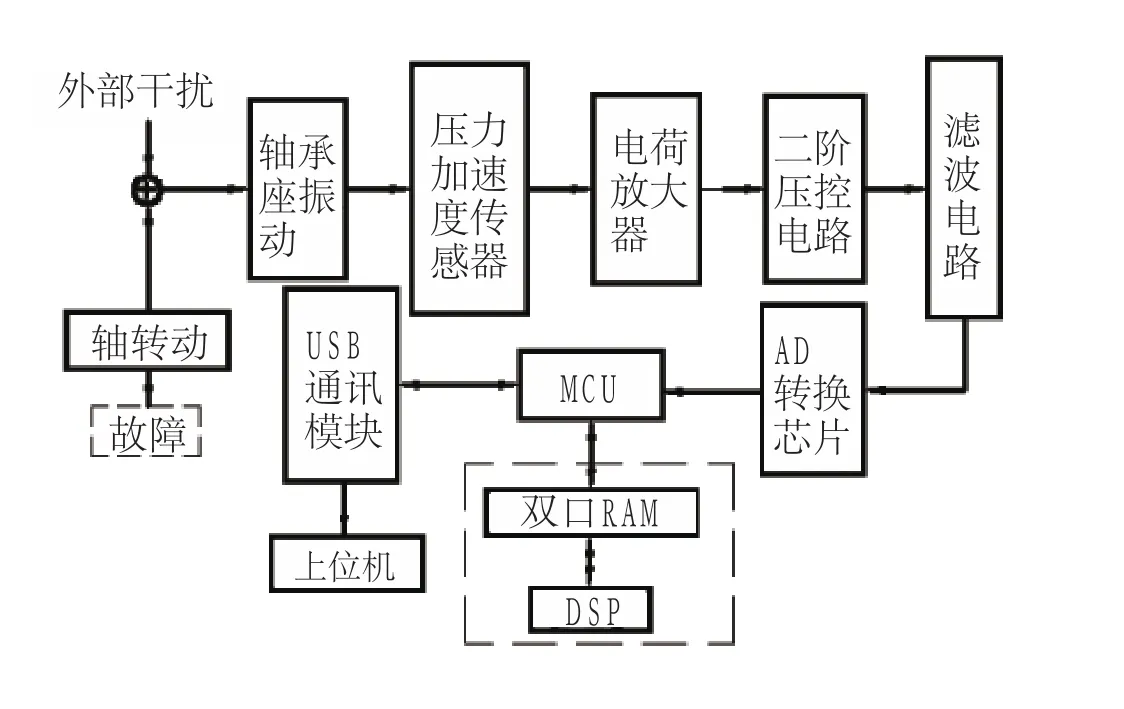
圖 1 改進后的故障檢測系統框圖
1.2 模塊硬件設計
1.2.1 雙口RAM型號的選擇
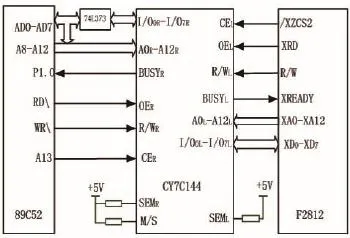
圖2 CY7C144與DSP和MCU的接口示意圖
DSP和MCU在系統工作需要不斷的大量交換數據,通過雙口RAM以資源共享的方式進行數據通信,不僅傳輸速率高,而且具有非常好的抗干擾性。雙口RAM實現了MCU和DSP的相互通訊,可以認為雙口RAM中的數據是為DSP和MCU所共用的。
采用CYPRESS公司的CY7C144這款芯片。它是一種低功耗的CMOS型8K×8位的雙口靜態RAM,最快響應速度為15ns,可以和DSP直接通訊而不需要等待在標準條件下的最大功耗為160mw,+5V供電并兼容TTL電平,具有省電的功能,可以進一步減小功耗具有良好的兼容性,可以和IDT7005和IDT7015等雙口RAM互換,各端口完全異步操作。
1.2.2 雙口RAM與CPU的接口
CY7C144作為MCU與DSP之間的通訊接口如圖2所示。CY7C144的左端地址總線與2812的XA0~XA12相連,CY7C144數據端口與2812的XD0~XD7相連;CY7C144的右端地址線的高四位與89C52的P2.0~P2.4相連,右端地址線的低八位與經過74LS737鎖存的P0.0~P0.7相連,數據線與P0.0~P0.7直接相連。其中SEMR、SEML、M/S應經電阻由+5V拉高。
1.3 模塊通訊協議設計
模塊軟件主要包括:CMD文件的編寫、FFT等算法在TMS320F2812上的實現、89C52與TMS320F2812的通信、程序向Flash的燒寫、軟件加密和看門狗的設計。
模塊由89C52與TMS320F2812構成一個主從系統,89C52將故障預處理數據傳送至2812,2812經過數字信號處理后返送回89C52。DSP采用C語言進行編程,MCU用匯編或C語言均可,只要在數據結構上進行換算即可實現暢通通訊。系統軟件流程圖如圖3所示。
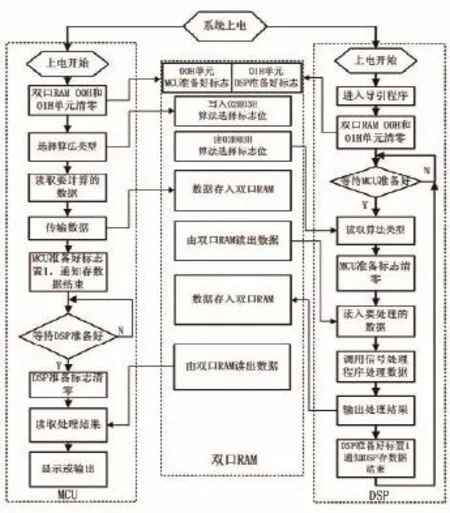
圖3 系統軟件流程圖
模塊中MCU(89C52)和DSP(TMS320F2812)的通信協議如下:雙口RAM的00H單元為MCU工作標志位,01H單元則為DSP工作標志位。單片機清完標志位后,將用戶所選擇的算法類型寫入02H和03H單元中,然后將從外部得到的輸入序列存入雙口RAM,存數據完成后置單片機準備標志位,通知DSP取數據,此后單片機則一直查詢01H單元DSP準備標志位。等單片機查詢到DSP完成計算后,將DSP準備標志位清零,然后讀取計算結果。DSP清完標志位后,一直在查詢單片機標志位,等待單片機完成輸入序列的傳輸,當查詢到輸入序列傳輸完成以后,DSP將單片機標志位清零,讀入算法選擇位,讀入輸入序列,完成計算,向雙口RAM 寫入結果,置DSP標志位,通知單片機取結果,然后等待下一個輸入序列。DSP上的主程序如下。
2 模塊在滾動軸承檢測中的應用
在滾動軸承檢測中,能否找到故障特征頻率是本系統的關鍵,故障輸入信號由一個存在故障的電機軸承給出。在此軸承外圈,人為使用電火花破壞一個壞點,電機運行后,將軸承的振動頻率采樣進來,得到1024個點的值,將這1024個值經DSP分析后給出圖像。
根據實驗所得,圖4為,當電機轉速n=600轉/分,A/D采樣頻率為1024時,經DSP處理后的頻譜。圖5為,當電機轉速n=400轉/分,A/D采樣頻率為512時,經DSP處理后的頻譜。
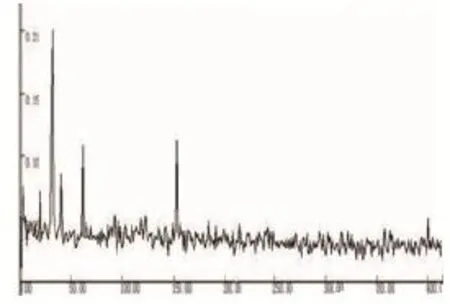
圖4 n=600 fs=1024故障信號頻譜

圖5 n=400 fs=512故障信號頻譜
根據軸承故障理論,圈上有單個損傷點的情況:用共振解調法診斷時得到的包絡頻譜圖形是一系列以外圈故障特征頻率fb為間隔的隨頻率增大幅值逐漸減小的離散譜線[4]。滾動體在外圈滾道上的通過頻率為:

經計算,n=400時,fb約為20Hz,n=600時,fb約為30Hz。從圖5中看出波形的峰值主要出現在30.668、61.336、92.524、121.633幾點,振幅逐漸衰減;從圖6看出波形的峰值主要出現在 20.012、40.024、60.036幾點,符合由軸承故障理論計算出的理論值,證明系統正確。并且在實驗過程中發現數據處理精度和速度比MCU有了明顯的提高。
3 結束語
提出的基于TMS320F2812與雙口RAM的信號處理模塊對以普通MCU為控制核心的故障檢測系統的改進,在保證原有檢測系統的控制能力基礎上,結合DSP應用各種算法對數據進行處理。實驗證明,明顯提高了故障檢測系統的數據處理能力。
[1] 張在峰,馬義德.DSP —數字化時代的基因芯片.信息技術.2003.53-56.
[2] 蘇奎峰,呂強,等.TMS320F2812XDSP原理及C程序開發.北京:北京航空航天大學出版社,2008:369-370
[3] 胡漢才.單片機原理及其接口技術.第一版.北京:清華大學出版社,2004:20-25.
[4] 梅宏斌著.滾動軸承振動監測與診斷.北京:機械工業出版社,1995:1-15.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
電子制作(2019年13期)2020-01-14 03:15:28
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
汽車維護與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產業(2016年3期)2016-05-17 04:32:12
汽車維修與保養(2015年6期)2015-04-17 03:31:50