基于ARM9200體系的IEEE 1588硬件實現
2010-08-14 01:11:24戴輝,涂岸
網絡安全與數據管理 2010年13期
戴 輝,涂 岸
(1.貴州大學 繼續教育學院,貴州 貴陽 550002;2.武漢大學 電子信息學院,湖北 武漢 430072)
在通信領域,“同步”概念是指頻率的同步,即網絡各個節點的時鐘頻率和相位同步,其誤差應符合相關標準。目前,在通信網中,頻率和相位同步問題已經基本解決,而時間的同步還沒有得到很好的解決。
在早期,通信系統負載較低,對時間的同步精度也較低,一般的GPS和NTP方式的同步[2]就可以滿足ms級別同步要求,但是隨著通信系統的發展,特別是3G技術的發展,傳統的同步方式越來越不能滿足同步要求。2004年,安捷倫公司提出的 IEEE 1588[3-4]同步系統具有里程碑意義,它標志著網絡同步開始進入次納秒精度領域。而2006年,國家半導體推出的DP83640芯片將IEEE 1588時間戳方案在硬件中首次實現,使次納秒級別網絡同步精度實現變為可能。
1 IEEE 1588實現原理
IEEE 1588,即精密時間協議PTP(Precision Time Protocol)由安捷倫于2004年提出,是為了克服以太網實時性不足而規定的一種對時機制。精密時間協議可以估算出數據包在網絡上的往返延遲,并可獨立地估算設備時鐘偏差。網絡時間協議的工作原理說明如下[5-7]:
(1)現場設備A發送一個 PTP包給現場設備 B,并記錄下數據包離開A的時間,該時間戳為t1。
(2)當此PTP包到達現場設備B時,現場設備 B加上自己接收到該數據包的時間戳,該時間戳為TS1。
(3)現場設備A發送一個Follow Up消息給現場設備 B,通知 B時間 t1。
(4)當此PTP包離開現場設備B時,并記錄下數據包離開B的時間t2。
(5)當現場設備A接收到該響應包時,加上一個新的時間戳,該時間戳為Tm2,整個同步過程如圖1所示。
(6)現場設備A再發送Follow Up消息給現場設備B,通知 B時間 Tm2。
至此,現場設備B己擁有足夠的信息來計算2個重要的參數:一是PTP數據包來回一個周期的時延,二是現場設備A和現場設備B的時鐘差。于是現場設備B能夠設定自己的時鐘與現場設備A同步。
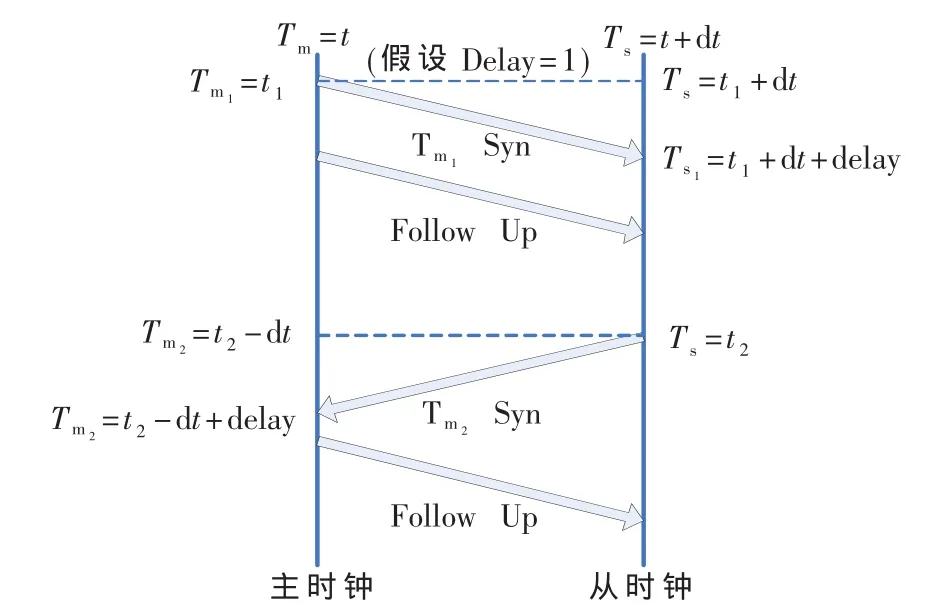
圖1 PTP時間同步示意圖
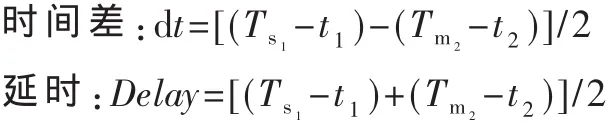
可以根據下面公式算出現場設備A與現場設備B之間的時間差和延時:
2系統硬件電路設計
2.1支持PTP協議嵌入式接口板設計
根據PTP協議框架,支持PTP協議的嵌入式接口板硬件框圖如圖2所示。
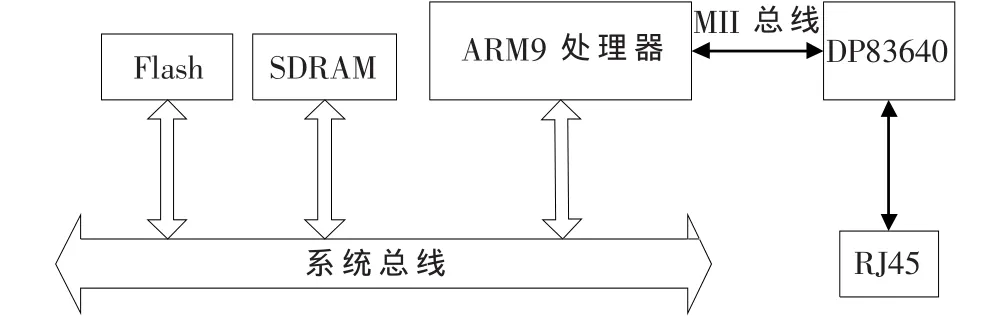
圖2 基于DP83640的接口板硬件框圖
DP83640高精度PHYTER收發器芯片內置高精度IEEE 1588時鐘,并設有由硬件執行的時間標記功能,可為接收及發送的信息包印上時間標記。DP83640最大的特色在于將IEEE 1588高精度時間協議(PTP)功能設于芯片的物理層之內,因此可以在最靠近網線的位置記錄時間標記,而且分辨度達8 ns,不但可為系統提供最準確的高精度控制功能,也確保采集回來的數據出現最少的抖動。
DP83640預載4個時鐘更新算法,用戶可以利用任何一個算法調節電路板上的PTP時鐘,而且偏差率保證不超過 10億分之一(即1ppb[8]的準確度)。
DP83640也可與部分符合IEEE 1588規定的處理器搭配一起使用,為測試及測量儀表等設備提供更準確的時鐘同步功能。其系統連接后時鐘關系圖如圖3所示。
2.2具體電路設計
系統實際設計電路主要包含如下部分:核心處理器ARM9200;存儲電路,其中包含了SDRAM和ROM兩部分的電路設計;網絡接口電路,其中使用DP83640通過RMII接口總線與ARM9處理器相連,把PTP報文的時間戳信息和當前時鐘讀數發送給ARM9處理器,同時接收來自ARM9處理器的時鐘調整值來調整本地時鐘。DP83640通過RMII總線來獲取以太網報文比特流而不是直接從物理層獲取,從而實現10 Mb/s和100 Mb/s兩種速率的自適應處理。
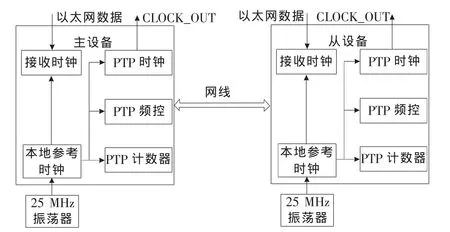
圖3 主從系統時鐘關系圖
3系統軟件設計
系統軟件結構如圖4所示。
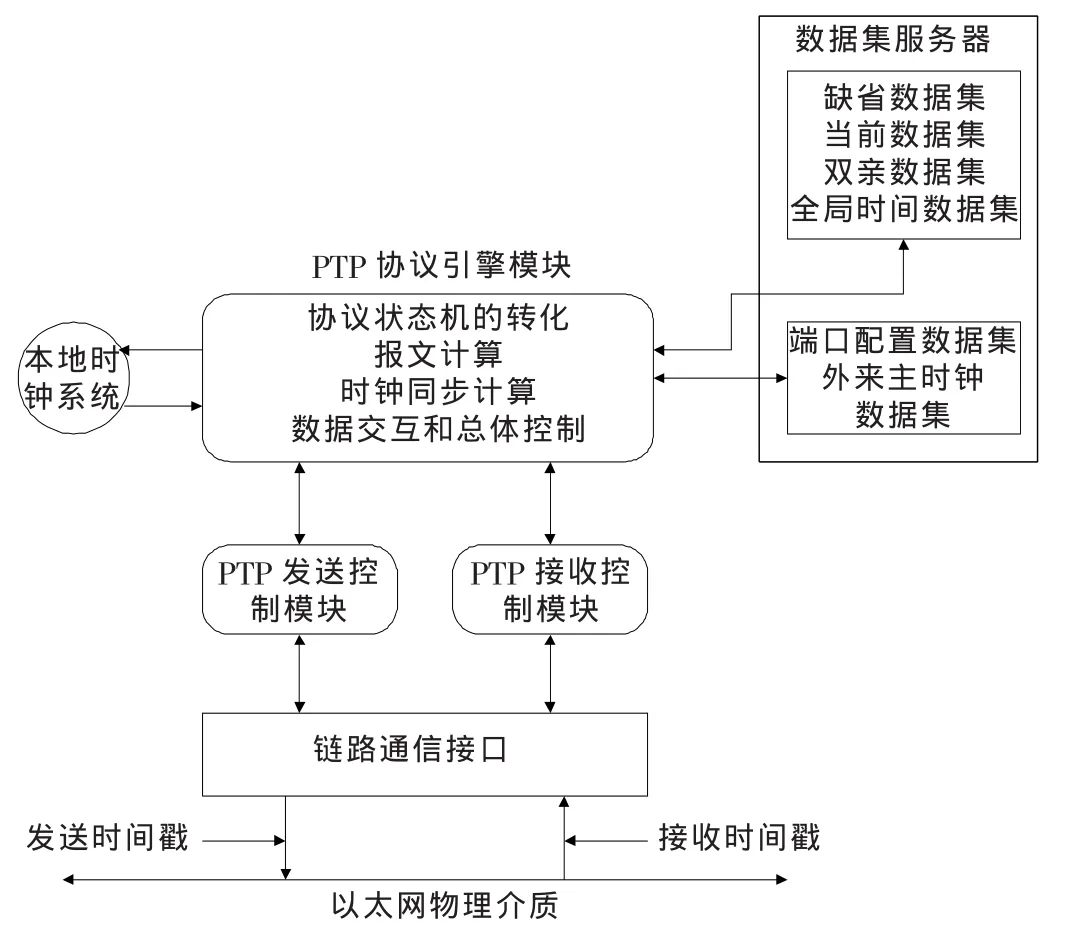
圖4 系統的體系結構示意圖
3.1 PTP協議狀態機模塊
PTP協議狀態機主要負責管理設備上電時的初始化狀態、出現異常情況下的故障狀態、通常情況下的偵聽狀態、主時鐘狀態、從時鐘狀態和未校準狀態,以及各狀態之間的轉化。
3.2最佳主時鐘選擇模塊
最佳主時鐘算法模塊主要用于選擇本地網絡中的最佳時鐘作為主時鐘,同時決定本地時鐘應處的狀態。
實現最佳主時鐘的方法包括兩個步驟:(1)從本地時鐘系統通信端口中選出一個質量最好的同步報文;(2)根據上述結果,比較此時的主時鐘和本地時鐘屬性,決定本地設備PTP協議引擎所處的狀態。步驟(1)采用數據集比較算法模塊來實現,步驟(2)采用狀態決斷算法模塊來實現。該模塊定義了STATE_DECISION_ALGORITHM()函數來進行狀態的決斷和數據集的更新。在缺省數據集的層數是1或2的前提下,調用DATASET_COMPARISON_ALGORITHM模塊來判定本地時鐘缺省數據集D0和較好時鐘Erbest的數據集哪個更好。
通過比較,如果是缺省數據集D0更好,則根據狀態決斷代碼 M1,調用函數 CreateMasterClock()根據缺省數據集D0的屬性值來構建主時鐘,并且將D0狀態更改為PTP_MASTER,這代表D0是目前最好的主時鐘;否則,調用函數CreateSlaveClock(),根據Erbest的屬性來構建從時鐘,Erbest的狀態則是PTP_SLAVE。
在主時鐘的層數大于2的情況下,調用DATASET_COMPARISON_ALGORITHM模塊,以對本地時鐘缺省數據集D0和最好時鐘Ebest進行判定。通過比較,如果是缺省數據集 D0更好,則調用 CreateMasterClock(),根據狀態決斷代碼M2,根據缺省數據集D0的屬性值來構建主時鐘,并且更改D0狀態為PTP_MASTER;否則,將調用DATASET_COMPARISON_ALGORITHM模塊將Ebest與Erbest進行比較,如果比較結果相同,根據狀態決斷代碼S1,根據Ebest的屬性來構建從時鐘,更改Ebest狀態成PTP_SLAVE。如果經過比較Ebest有更好的屬性值,則根據狀態決斷代碼 M3,根據Erbest的屬性來構建從時鐘,并設置它的狀態為 PTP_SLAVE;否則,根據狀態決斷代碼 P2,根據Ebest的屬性來構建主時鐘,改變它的狀態為PTP_MASTER。
最佳主時鐘選擇模塊示意圖如圖5所示。
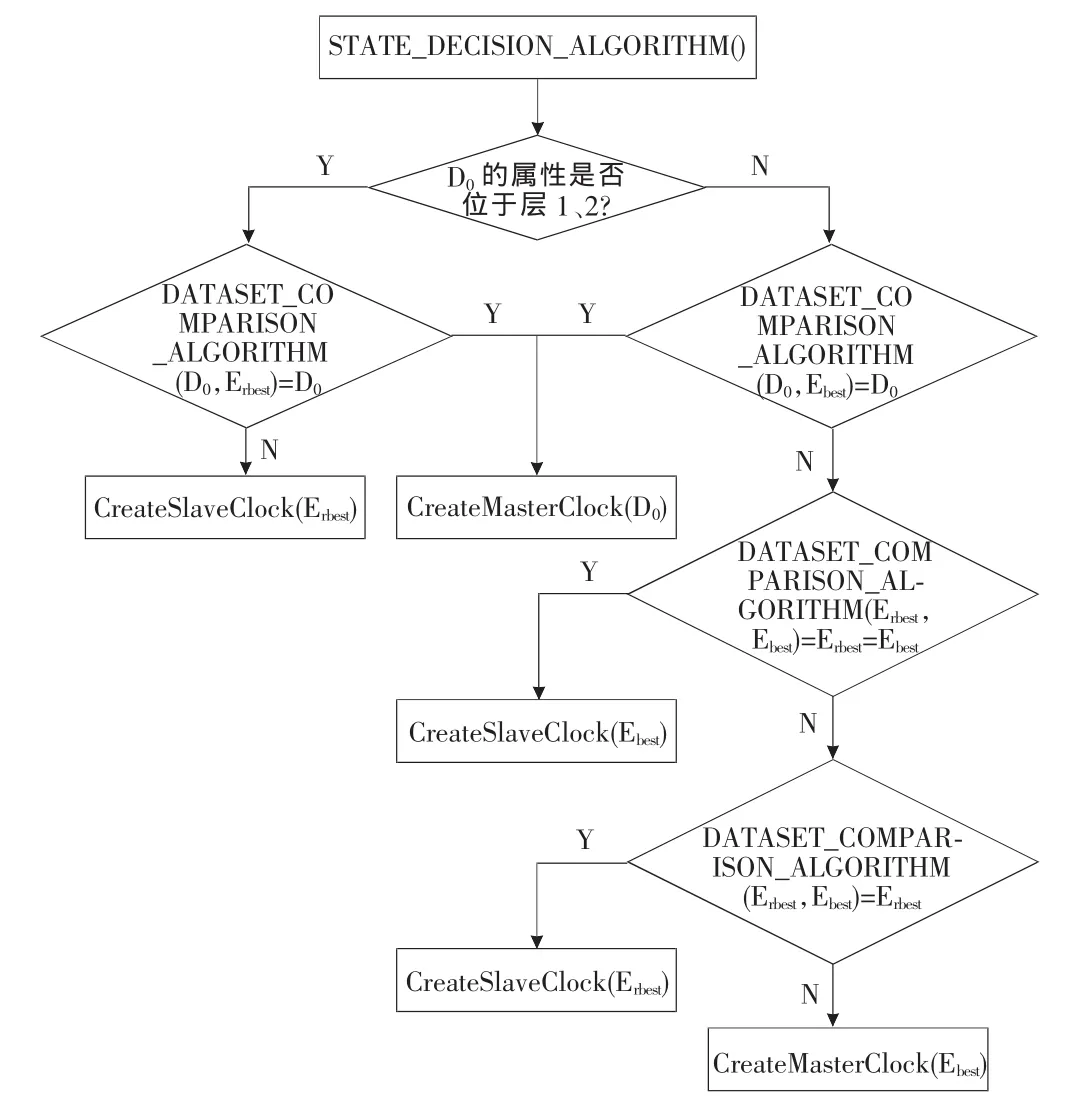
圖5 最佳主時鐘選擇
3.3時鐘調整模塊
本地時鐘同步算法是PTP協議中十分關鍵的部分,主要用來調整本地時間,與主時鐘的基準時間保持一致性。主時鐘被選擇出來后,就開始調用同步報文發送函數 PTP_Send_PTP_SYNC_MESSAGE(),構造同步報文并對報文初始化,記錄發送出去的時間戳,再調用udp_send()將報文打包并加入發送緩沖區進行發送。
調用跟隨報文發送函數PTP_Send_PTP_FOLLOW_MESSAGE(),構造跟隨報文并對報文初始化,記錄發送出去的時間戳,然后調用udp_send()將報文打包并加入發送緩沖區進行發送。
從時鐘udp_rcve()設置接收緩沖區分別先后接收了同步報文和跟隨報文,記錄下接收的時間打上時間戳,再調用函數PTP_RECV_PROCESS()判斷接收的是哪種報文,如果是同步報文,則調用函數 PTP_RECV_SYNC(),然后對報文解包,取出報文從主時鐘發送過來的時間。如果是跟隨報文,則調用函數 PTP_RECV_FOLLOWUP()對報文解包,取出報文從主時鐘發送過來的時間。
在這個函數最后,調用了PTP_Send_Delay_Req()函數,它構造延遲請求報文并對報文初始化,記錄發送出去的時間戳,然后調用udp_send()將報文打包并加入發送緩沖區進行發送;而主時鐘的緩沖區一旦有報文,則主時鐘立即調用udp_rcve()記錄下接收的時間打上時間戳,再調用函數PTP_RECV_PROCESS()判斷接收的是哪種報文,如果是延遲請求報文,則函數PTP_RECV_DELAY_REQ()立 即 調用 PTP_Send_PTP_REQ_RESP(),從 時鐘根據收到的4個報文收發時間,計算出主從偏差,對自己的時間進行校正。
整個程序流程如圖6所示。
4系統測試結果與結論
系統測試將兩片DP83640連接到1 Hz信號輸出,利用DP83640捕獲上升沿時間戳實現,在Linux系統中,利用MII總線讀取DP83640時間戳寄存器,數據結果如表1所示。
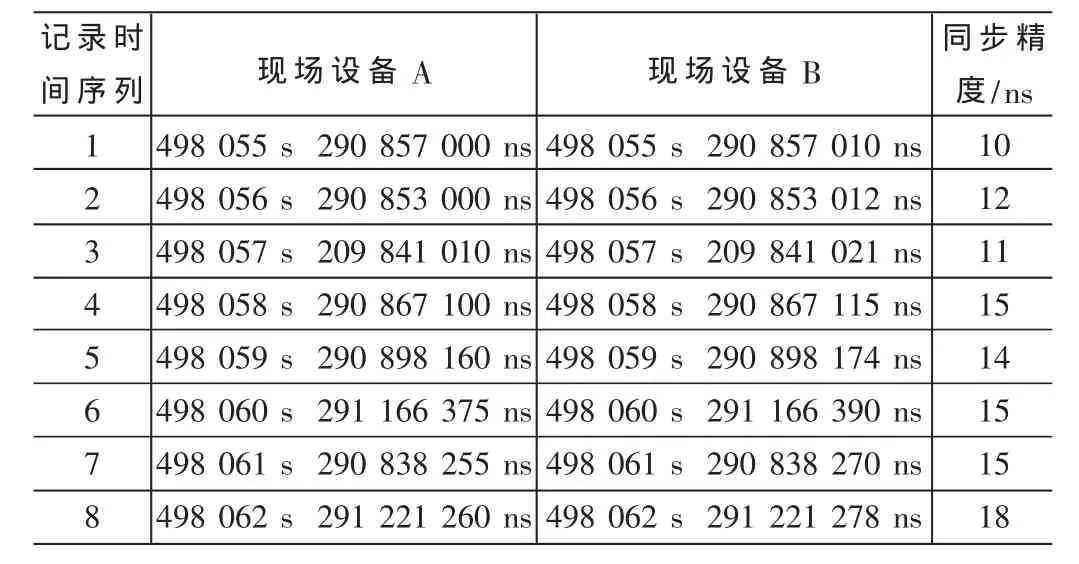
表1 系統測試結果
實驗結果,表明利用DP83640達到了10 ns級別的同步精度,完成了系統的設計目標。
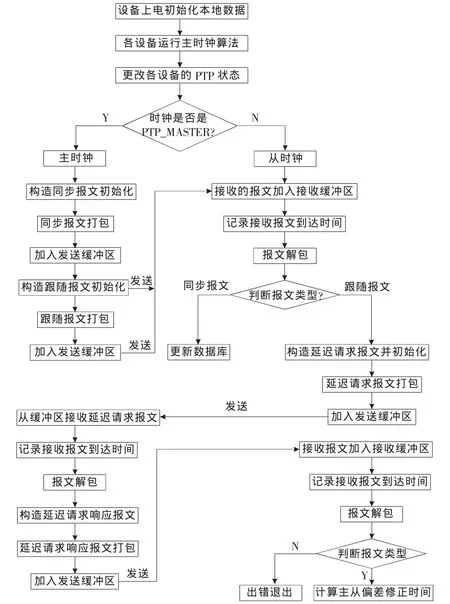
圖6 系統的體系結構示意圖
IEEE 1588提供的時間同步在理想條件下(網絡完全對稱),能夠達到極高的同步精度,為通信系統同步建設提供了更完美的解決方案。
[1]秦云川,徐大令,李彤.測量儀器總線技術的發展與現狀[J].中 國 儀 器 儀 表 ,2005(8):48-52.
[2]Ji Ling.LXI-2000年代的新一代儀器系統總線[J].國外電 子 測 量 技 術 ,2005(2):1-3.
[3] TC9-TechnicalCommitteeon SensorTechnology, 1588 IEEE Standard for a Precision Clock Synchronization Protocol for Networked Measurement and Control Systems[C].2002.
[4]EIDSON J C.IEEE 1588:Applications in Measurement,Control and Communication.2005.
[5]李鑒,孫寶成,周雷.一種新的局域網時間同步方法[J].計算機與數字工程,2005,33(9):161-164.
[6]王建珍.計算機網絡時間同步技術應用研究[J].山西電子 技 術 ,2005(4):7-8.
[7]安榮亮.局域網時間同步原理及設計[J].電光系統,2005(2):47-49.
[8]Simple Network Time Protocol(SNTP)Version 4 for IPv4,IPv6 and OSI.http://www.networksorcery.com/enp/rfc/rfc2030.txt.2009.
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
工業設計(2016年12期)2016-04-16 02:52:00