線性調頻連續波時頻分析中的余弦變換方法
2010-08-21 12:33:32趙繼廣宋一鑠張智詮
探測與控制學報 2010年4期
關鍵詞:信號
趙繼廣,宋一鑠,張智詮
(1.裝甲兵工程學院控制工程系,北京 100072;2.裝備指揮技術學院,北京 101416)
0 引言
線性調頻連續波(Linear Frequency Modulation/Continuous Wave,LFM/CW)體制測距系統,通過對回波信號與本振信號混頻后得到的差頻信號頻率的測量實現對目標距離的測量[1]。該測距系統在一些距離范圍內獲得的差頻信號的初始相位近似為0,目前一般利用傅里葉變換進行時頻分析[2]從而得到差頻信號的頻率,但由于其測距分辨力不夠高且運算量大,因此難于實現實時多距離分辨。為此,本文提出利用余弦變換進行時頻分析的方法。
1 傅里葉變換與余弦變換
傅里葉變換是進行頻譜分析的重要方法,余弦變換是傅里葉變換的一部分。傅里葉變換具有普適性,對于一般信號都能給出正確的頻譜。具體到一些擁有特殊性質的信號,可以考慮利用其他時頻分析方法處理,從而突出某一方面的性能。例如對于初始相位為0(或近似為0)的余弦信號,余弦變換不僅能夠給出近似正確的頻譜,還具有較小的運算量[3]和更高的頻率分辨力。
1.1 傅里葉變換
在實際應用中受器件和環境等因素的影響,所得到的差頻信號的信噪比較低。由于傅里葉變換對噪聲抑制能力強,所以一般用其獲得信號頻譜信息。根據傅里葉變換的定義,連續非周期信號s(t)的傅里葉變換可以表示為[4]:

將式(1)展開,得到

對上式取模,即得到信號的頻譜。由(2)式可知:將信號s(t)分別與各種頻率下的余弦和正弦信號進行混頻,再將每一個頻率下的兩個混頻結果取模就得到了該頻率下的頻譜幅值。由于連續非周期信號等同于周期無限大的周期信號,所以得到的頻譜應該被理解為頻譜密度。信號s(t)中包含的任一頻率分量的初始相位都是未知的,頻譜分析不應受到未知初始相位的影響,所以傅里葉變換采用正交混頻并取模的方式,使得只要信號s(t)中存在該頻率分量,計算結果就會在該頻率點上得到峰值且不會受到其初始相位的影響。
對頻率為 fIF,時長為 T的余弦信號,無論其初始相位如何,對其進行傅里葉變換后,其頻域將呈現一個峰值在 f IF處的SINC函數,如圖1所示。

圖1 1 ms時長矩形窗函數的傅立葉變換頻譜圖Fig.1 The frequency spectrum of 1 ms-lasting rectangular window in Fourier transform
1.2 余弦變換
連續非周期信號S IF的余弦變換為[5]:

在余弦變換下,由于沒有涉及正交混頻,所以信號的初始相位不同會引起頻譜誤差,即通過余弦變換得到的頻譜會因為信號的初始相位而出現頻譜偏移和畸變。例如對一時長為T、頻率為 f 1且初始相位φ0不為0的余弦信號

作余弦變換,得到信號頻譜
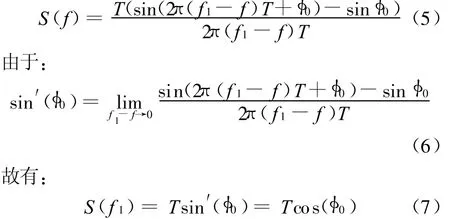
由式(7)可知用余弦變換得到的頻譜函數在差頻信號頻率點上的幅度會受到初始相位的影響。只有當信號初始相位為0(或近似為0)時,才能得到和傅里葉變換一致(或近似一致)的結果,即在頻域呈現一個峰值在 f IF處的SINC函數,如圖2所示。
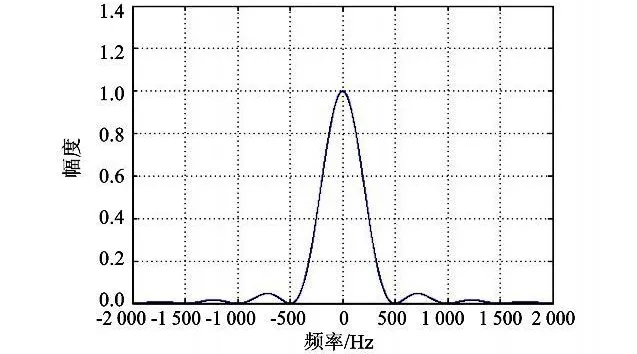
圖2 1 ms時長矩形窗函數的余弦變換頻譜圖Fig.2 The frequency spectrum of 1 ms-lasting rectangular window in cosine transform
2 線性調頻連續波時頻分析的余弦變換原理
LFM/CW體制測距系統將回波信號與本振信號混頻得到差頻信號,該差頻信號的頻率與目標距離間存在線性關系[1]。在實際應用中,綜合考慮信號信噪比和抗干擾能力等因素,一般利用傅里葉變換提取差頻信號的頻率。如果在一次測量中存在兩個或以上不同距離的目標,那么得到的差頻信號中也含有與這些目標距離對應的頻率。分辨開這些頻率就分辨開了這些不同的距離。由第一節中傅里葉變換和余弦變換的性質可知,對于時長為 T的余弦信號,兩種變換下的頻率分辨力分別為 T-1和0.5T-1,但使用余弦變換時要求信號的初始相位近似為零以避免頻譜偏移和失真。LFM/CW體制測距系統得到的差頻信號由一個或多個余弦信號組成,通過改變系統參數,這些余弦信號的初始相位在一些距離范圍內近似為0,此時利用余弦變換可得到近似正確的信號頻譜。這使余弦變換在 LFM/CW測距中的應用成為可能,即可利用余弦變換處理差頻信號,使得在差頻信號時長不變的情況下,將頻率分辨力提高到使用傅里葉變換時的兩倍。
3 余弦變換在LFM/CW體制測距系統中的應用
3.1 余弦變換下LFM/CW體制測距系統的測距分辨力
具體到 LFM/CW 體制測距系統[6],由于一個周期內觀察到的差頻信號的頻率為fIF,時長約等于掃頻周期T,故對其進行傅里葉變換后,其頻域將呈現一個峰值在 fIF處的SINC函數,此時SINC函數的主瓣寬度為 T-1,頻率分辨力為T-1,即如果兩個差頻信號相差小于T-1則會造成頻譜疊加而無法分辨。所以如果發射信號掃頻帶寬為B,則利用傅里葉變換處理被矩形窗截短的差頻信號時,LFM/CW體制測距系統的測距分辨力為:

這說明如果系統探測到的兩個目標之間的距離差小于0.5cB-1,則不能正確分辨兩個目標。相比在傅里葉變換下得到的結果,利用余弦變換得到的SINC函數主瓣寬度不再是T-1,而是0.5T-1。即對于初始相位為0(或近似為0)的余弦信號,在信號時長為T的情況下,其頻率分辨力為0.5T-1,比傅里葉變換提高了一倍,相應的測距分辨力也提高到

3.2 差頻信號分析
LFM/CW體制測距系統得到的差頻信號由回波信號與本振信號經混頻濾波后得到,在τ≤t≤T時間內,其形式由式(10)給出[6]。

式中,τ為回波時延,f 0為信號掃頻起始頻率,k為掃頻斜率。由式(10)可知,當系統參數和目標距離R一定時,差頻信號是一個頻率和初始相位都確定的余弦信號,其頻率為kτ,初始相位為2πf 0τ。由于

則初始相位為

分析式(12)可知,當

差頻信號的初始相位為kπ,對于傅里葉變換和余弦變換而言,相當于一系列初始相位為0的余弦信號,當

差頻信號的初始相位為kπ-0.5π,相當于一系列初始相位為0.5π的余弦信號。
4 傅里葉變換與余弦變換下LFM/CW體制測距系統距離分辨仿真
4.1 余弦變換下系統參數的設定
由前面的分析可知,傅里葉變換采用正交混頻并取模的方式避免了信號初始相位對頻譜分析的影響,而當信號初始相位為0(或近似為0)時,使用余弦變換的方法同樣可以得到近似正確的頻譜。具體到LFM/CW體制測距系統中得到的差頻信號,由前面的分析可知,若目標距離

則此時初始相位φ0將趨近于0,此時該距離范圍內目標對應的一系列差頻信號的初始相位可以近似看作為0,這使得利用余弦變換處理差頻信號成為可能。若差頻信號頻率f IF和初始相位φ0滿足下面的條件

則目標距離R的范圍可由式(17)得到

限制參數α、β可以根據具體要求的頻譜誤差和濾波器性能設定。根據這些限制參數,令

便得到利用余弦變換可測量最大目標距離

例如,若令α=0.05,β=0.7則保證了由目標距離引入的初始相位最大不超過0.05π以及差頻信號為掃頻起始頻率 f 0的0.7倍,當掃頻帶寬B=100 MHz,掃頻周期T=10 ms時,得到可測量最大目標距離約為198 m。
4.2 測距分辨力仿真
為了驗證利用余弦變換提高LFM/CW體制測距系統測距分辨力的可行性,現對20 m處的多目標進行距離分辨,要求測距分辨力為0.25 m,掃頻周期T=1 ms。根據分辨力要求及參數限制,掃頻起始頻率應為f 0=100 k Hz,掃頻帶寬B=300 MHz。現假設三個目標分別距離系統為19.75 m,20 m,20.25 m利用余弦變換得到的仿真結果如圖3所示。
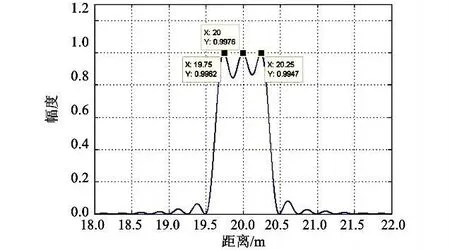
圖3 利用余弦變換進行20 m附近三目標距離譜仿真Fig.3 The distance spectrum simulation of the 3 targets around 20 m using cosine transform
從圖中可以看出,在式(15)的條件下差頻信號的初始相位對測距造成的影響很小,余弦變換不僅給出了準確的距離信息而且分辨出了相距0.25 m的三個距離。此時若使用傅里葉變換,則根據式(8)得到其測距分辨力為0.5 m,不能對三個距離進行分辨,如圖4所示。
現將LFM/CW體制下利用余弦變換進行距離分辨的方法總結如下:
1)根據測距分辨力要求確定掃頻帶寬B;
2)根據目標距離及限制參數,由式(17)確定起始掃頻頻率f0和掃頻周期T,由式(19)確定最大距離Rmax;
3)對差頻信號進行余弦變換,完成分辨。
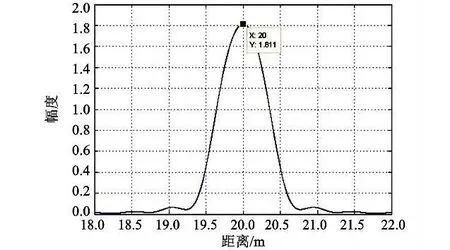
圖4 利用傅里葉變換進行20 m附近三目標距離譜仿真Fig.4 The distance spectrum simulation of the 3 targets around 20 m using Fourier transform
5 結論
本文提出了調頻連續波時頻分析中的余弦變換方法,該方法利用余弦變換在處理零初始相位單頻信號時具有高頻率分辨力這一優點,將其應用于處理LFM/CW體制測距系統得到的差頻信號從而提高測距分辨力。理論分析和仿真證實了在一定距離范圍內,使用余弦變換處理差頻信號可以得到近似正確的頻譜,相比使用傅里葉變換時其測距分辨力提高了一倍。
[1]丁鷺飛,耿富錄.雷達原理[M].西安:西安電子科技大學出版社,2006:177-182.
[2]高慶地,李世光,高正中,等.傅里葉變換的數學再認識[J].數據采集與處理,2008,23(增刊):23-26.GAO Qingdi,LI Shiguang,GAO Zhengzhong,et al.Recognition mathematics based on fourier transform[J].Jourrnal of Data Acquisition&Processing,2008,23(增刊):23-26.
[3]Wang Z,Jillian G A,Miller W C.Recursive algorithms for the forward and inverse discretecosine transform with arbitrary length[J].IEEE Signal Processing Letter,1994,1(7):101-102.
[4]鄭君里,應啟珩,楊為理.信號與系統(第二版)[M].北京:高等教育出版社,2004:109-113.
[5]郭大鈞.大學數學手冊[M].濟南:山東科學技術出版社,1985:541-542.
[6]ZHAO Jiguang,ZHANG Zhiquan,DENG Chen.Research on design and simulation of FM/cw lidar system[J].Laser Sensing and Imaging,2009,7 382:169-171.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06