巷道平移式立體車庫結構和控制系統設計
2010-08-23 08:33:24梁秀英段成財李慶偉
制造業自動化 2010年2期
關鍵詞:方向
梁秀英,段成財,李慶偉
LIANG Xiu-ying, DUAN Cheng-cai, LI Qing-wei
(華中農業大學 工程技術學院,武漢 430070)
0 引言
近年來,隨著國民經濟的增長和汽車工業的發展,我國汽車的使用量大幅上升,汽車泊位與汽車數量的比例嚴重失調,城市中停車難、違章停車的矛盾越來越尖銳[1~3]。針對這一現狀,向空中和地下發展的立體車庫成為現代泊車的必然選擇。立體車庫提高了土地使用率,實現了停車過程中人車分流,從而保障了人身安全。根據結構形式的不同,立體車庫可分為升降橫移式、平面移動式、巷道堆垛式、垂直升降式、簡易升降式等多種形式[4]。本文提出的巷道平移式立體車庫,結合了巷道堆垛類的大容量和平面移動類的高效率等優點。本文設計了巷道平移式立體車庫的機械結構和控制系統。
1 系統結構及工作原理
1.1 系統結構
立體車庫的機械部分主要由移動平臺和車位組成,移動平臺的作用是實現車輛在X、Y、Z方向的移動,其中X軸方向的運動主要是由橫移機構和微橫移機構來完成,主要包括電機、減速器、傳動軸、橫移鏈輪、推拉銷、聯軸器、驅動齒輪以及齒條等部分組成;Y軸方向的運動由驅動輪和導軌來完成,主要包括電機、減速器、主動和從動鏈輪、傳動鏈條、傳動軸、驅動輪以及平行導軌等部分組成;Z軸方向運動由鋼絲繩帶動提升架來完成,主要包括電機、減速器、聯軸器、鋼絲滾筒、鋼絲繩、定滑輪和提升轎廂等部分組成。車位的功能是存放載車板,一般包括兩層或多層,主要結構是型鋼聯接成的鋼架,此外還包括保險鉤和承載滾道等一系列輔助部件。立體車庫的總體布局如圖1所示。
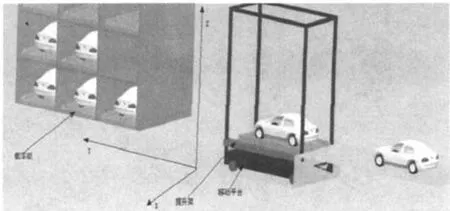
圖1 立體車庫的總體布局圖
1.2 工作原理
1.2.1 存車
當按下存車按鈕并選擇車位后,移動平臺就會在電機的驅動下沿著軌道進行Y方向的運動,移動平臺到位后提升電機開始正轉,提升架向上沿Z方向運動,提升架到位后驅動微橫移電機開始反轉,帶動微橫移機構沿X負方向動作,微橫移機構到位后橫移電機開始正轉,推拉銷在橫移鏈輪的帶動下由鏈輪的一端開始進行圓周運動,在這個運動過程中推拉銷實現了向Z軸正方向的運動,并實現了與推拉鉤的嚙合。推拉銷運動到鏈輪頂端后開始做水平運動并帶動推拉鉤和載車板X軸正向運動,到位后驅動提升電機反方向運動,提升轎廂沿Z軸向下運動,到位后平臺驅動電機反轉,實現Y軸負向運動,運動到位后電機停轉,實現了載車板的取出。
車停到載車板后,若車的長寬高滿足系統要求,則開始存車,否則發出報警信號。存車系統按照上述順序進行Y向和Z向運動,Z向到位后微橫移電機開始反轉,載車板在微橫移機構的帶動下進行X負方向移動;到位后微橫移電機開始反轉,載車板在微橫移機構的帶動下繼續向前運動,當推拉銷運動到鏈輪端點時推拉銷和推拉鉤自動脫離,與此同時保險鉤的作用端在彈簧的拉力下向上翹起,起到保險作用。
存車完成后,微橫移機構開始運動,到位后停止運動,然后再進行Z方向和Y方向的運動,最終回到原位,完成存車過程。車位、推拉銷嚙合、載車板的示意圖如圖2所示。
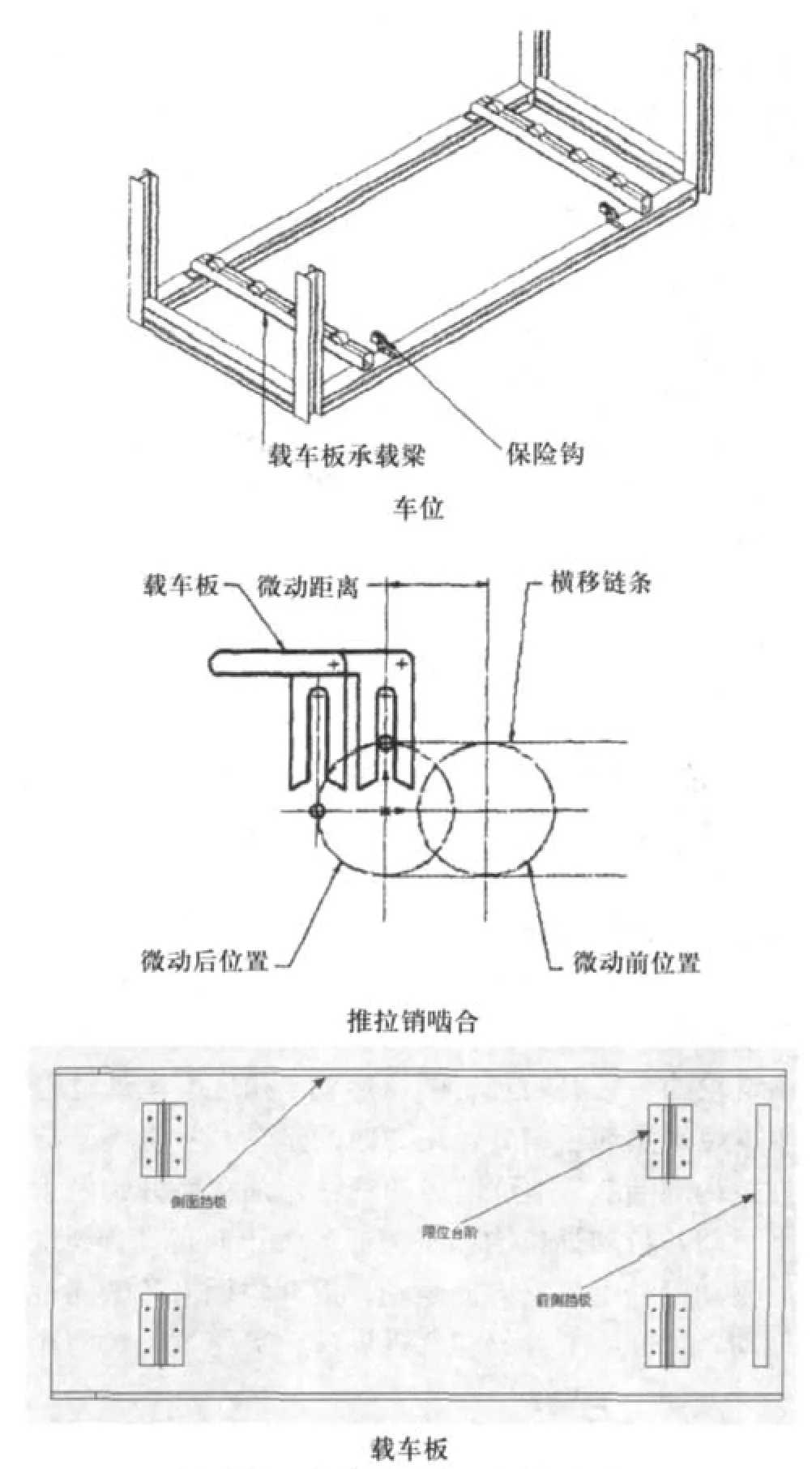
圖2 車位、推拉銷嚙合、載車板示意圖
1.2.2 取車
當按下取車按鈕并選擇車位后,移動平臺就先按照上述步驟先進行Y軸正向運動,在進行Z軸正向運、X軸負向運動,推拉銷和推拉鉤嚙合后進行X軸正向運動、Z軸負向運動、Y軸負向運動,最終回到原位,實現車輛的取出。
2 控制系統設計
2.1 硬件設計
巷道平移式立體車庫控制系統按3層設計,每層3個庫位,分南北兩區,中間為移動平臺。其硬件結構框圖如圖3所示。其中存取車界面如圖4所示,采用與車位相對應的指示燈來提示車位是否有車,即每個車位的狀態指示燈顯示了當前該車位是否有車,如果已停車則該指示燈為亮,此時只能取車不能停車,反之,若該指示燈為滅的狀態,則可以存車;根據輸入輸出點數和存儲容量的要求,本系統的控制器選擇三菱FX2 N-80MT-D型PLC,具有40點輸入/40點晶體管輸出,存儲容量為8000步;傳感器有距離和位置傳感器兩類,距離傳感器是判斷移動平臺何時到達指定的位置,即控制X、Y和Z軸的位置,根據不同的檢測方式可以用不同的傳感器,在這里經過綜合比較選擇最為普遍且能達到精度的 L5XCMN 2112 L 1型行程開關,位置傳感器是用來控制車長和車高,不讓其超過載車盤的極限位置[5],選用三易電氣公司生產的型號為JCG-1650 D 03NO的常開型光電接近開關,安裝在升降平臺上;PLC輸入接口電路主要是采用光電耦合器把傳感器的輸出信號耦合到PLC的輸入口,而PLC輸出接口電路則采用固態繼電器(S S R)去控制執行電機動作;另外當所存車的高度超過了車庫所規定的高度時就發出報警信號。
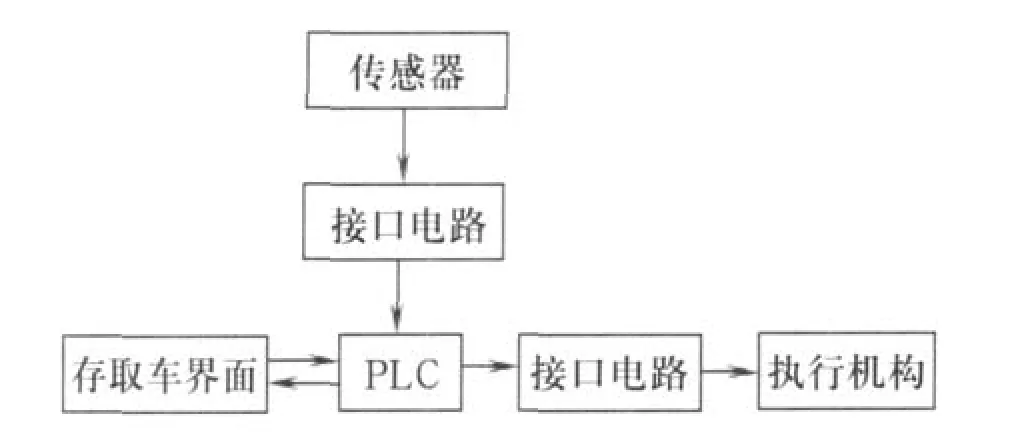
圖3 立體車庫硬件結構框圖
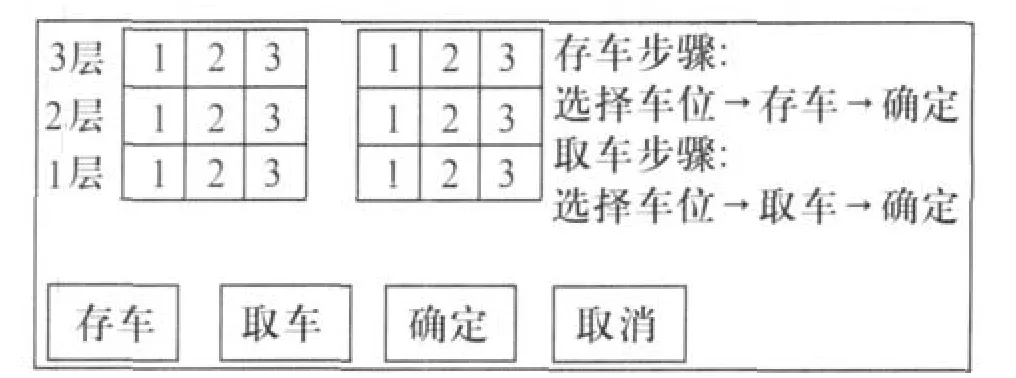
圖4 存取車控制界面
2.2 軟件設計
本立體車庫控制系統采用手動操作和自動操作兩部分,手動操作主要用于車庫設備的安裝調試、維修和故障處理,自動操作為車庫正常運行時使用,兩套系統互不影響[1]。自動操作的軟件流程圖如圖5所示。
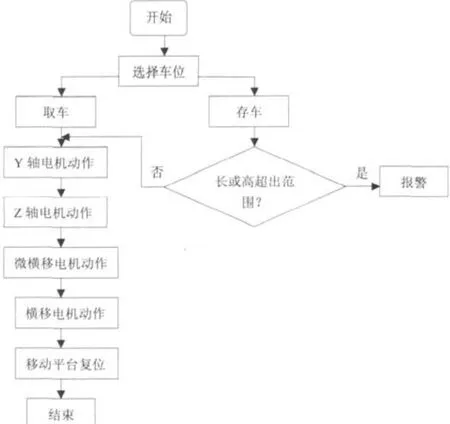
圖5 自動操作的軟件流程圖
3 結論
在現有的多種自動化立體車庫的基礎之上,提出了一種新的設計思路,融合了平面移動類和巷道堆垛類兩種車庫的設計方法,既實現了Y軸方向的移動,增加存車容量,又能夠實現X方向的水平無搬運平移;控制系統采用限位開關和光電接近開關,不但控制精度高而且使整個控制系統的輸入、輸出接口電路接線簡單、方便,運行穩定、可靠;硬件和軟件設計中充分考慮車庫容量的問題,只需要很小的修改就能實現車庫容量的改變。
[1]張華強,王陶,蘇曉良,等.基于H MI和PLC的立體車庫自動控制系統[J].電氣傳動,2005,35(8):50-53.
[2]王雪潔,王國雄.PLC與變頻器在巷道堆垛式立體車庫控制系統中的應用[J].起重運輸機械,2005,(2):19-20.
[3]姚小明,白晨明,范多旺,等.巷道堆垛式自動化立體車庫監控系統[J].電氣傳動,2005,35(11):41-44.
[4]李祥啟.立體車庫的選型與應用[J].建設科技,2008,(10):66-67.
[5]馬幼捷,張海濤,周雪松,等.多層循環式立體車庫控制核心的研究——從PLC到D S P的升級[J].制造業自動化,2009,31(5):9-13.
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50
