壓氣機(jī)喘振聲音信號的快速傅里葉變換和小波變換分析
2010-08-31 06:06:54曹昳劼臧樹升
電力與能源 2010年3期
關(guān)鍵詞:信號
曹昳劼,臧樹升,葛 冰
(上海交通大學(xué)葉輪機(jī)械研究所,上海200240)
壓氣機(jī)發(fā)生喘振時(shí)會伴隨特有的噪聲,但是這種噪聲很可能被壓氣機(jī)本身的噪聲所淹沒。有經(jīng)驗(yàn)的操作人員在生產(chǎn)現(xiàn)場雖然可以根據(jù)聽到的噪聲中判斷壓氣機(jī)的運(yùn)行是否正常,當(dāng)壓氣機(jī)喘振時(shí)雖然可以分辨出喘振噪聲甚至聲源的位置,但是這種建立個(gè)人的經(jīng)驗(yàn)基礎(chǔ)上的判斷帶有主觀性,例如不同的人判斷的結(jié)果往往不一致,有時(shí)很難及時(shí)做出正確的決策。隨著計(jì)算機(jī)模式識別技術(shù)的提高,目前已經(jīng)可以采用聲學(xué)測量和信號分析等方法,根據(jù)噪聲判斷壓氣機(jī)的喘振故障。例如居太亮等人利用麥克風(fēng)聲音陣列的特性,建立了較為準(zhǔn)確的麥克風(fēng)陣列近場寬帶三維聲源定位算法[1];陳露明等人在對麥克風(fēng)的采樣噪聲信號進(jìn)行處理,提出了一種在DSP平臺上的硬件和軟件解決方案[2]。M.Morini等人對一個(gè)小型的六級軸流式壓氣機(jī)在穩(wěn)定工況下以及變工況運(yùn)行時(shí)的振動和聲音信號進(jìn)行了對比研究,指出聲音信號在壓氣機(jī)監(jiān)測上具有一定的可行性,并對聲音信號在壓氣機(jī)具體工況的測量及信號處理的方法進(jìn)行了一定的闡述[3]。所有的這些監(jiān)測方法關(guān)鍵是噪聲信號的識別和特征信號的提取,但是沒有對喘振一壓氣機(jī)運(yùn)行時(shí)的危險(xiǎn)工況進(jìn)行特別的研究和討論。本文將在此基礎(chǔ)上,對壓氣機(jī)在進(jìn)入喘振時(shí)的聲音進(jìn)行研究和處理,通過消除噪聲干擾信號來得到喘振時(shí)聲音的特征信號,為實(shí)際生產(chǎn)中使用聲音信號監(jiān)測壓氣機(jī)狀態(tài)以及故障診斷提供了良好的理論基礎(chǔ)和依據(jù)。
1 試驗(yàn)裝置與數(shù)據(jù)采集系統(tǒng)
本文的試驗(yàn)裝置由壓氣機(jī),變頻電機(jī)和減速齒輪箱組成,俯視圖如圖1所示。
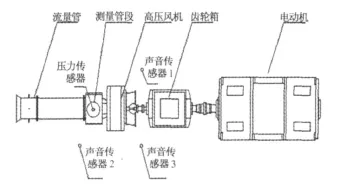
圖1 試驗(yàn)裝置俯視圖
試驗(yàn)裝置采用三個(gè)PCB公司的130D20麥克風(fēng)傳感器收集壓氣機(jī)運(yùn)行發(fā)出的聲音信息,傳感器的頻率響應(yīng)為10 Hz到15 kHz,布置在壓氣機(jī)的周圍;采用庫力特公司的XTL-190M系列的壓力傳感器測量壓氣機(jī)出口的動態(tài)壓力;采用LDS Nicolet公司的Genesis系列GEN7t高速采集儀器進(jìn)行聲音和動態(tài)壓力信號的采集,采樣頻率為1 k/s。試驗(yàn)通過改變電機(jī)頻率調(diào)整壓氣機(jī)的轉(zhuǎn)速,通過閥門開度調(diào)整壓氣機(jī)的工況,壓氣機(jī)運(yùn)行過程的壓力、溫度、流量和轉(zhuǎn)速等信號則通過PLC數(shù)據(jù)采集系統(tǒng)進(jìn)行記錄。
2 試驗(yàn)數(shù)據(jù)及分析
試驗(yàn)主要是通過改變電機(jī)頻率以調(diào)節(jié)壓氣機(jī)轉(zhuǎn)速以及改變閥門開度以調(diào)節(jié)流量的方法來控制壓氣機(jī)的實(shí)際運(yùn)行工況。
試驗(yàn)以壓氣機(jī)的特性曲線為依據(jù),從壓氣機(jī)的低工況開始做起在保證閥門開度不變的情況下通過逐步提高壓氣機(jī)的轉(zhuǎn)速來使其進(jìn)入喘振區(qū)域。接著增大閥門的開度使流量增大,這時(shí)壓氣機(jī)的運(yùn)行工況將逐漸遠(yuǎn)離喘振線,然后保持閥門開度不變,再次提高轉(zhuǎn)速使得壓氣機(jī)的運(yùn)行工況再次進(jìn)入喘振區(qū)域,具體的試驗(yàn)過程如表1所示。
在整個(gè)試驗(yàn)測量的過程中,壓氣機(jī)的運(yùn)行工況點(diǎn)有兩次進(jìn)入了喘振區(qū)域。圖2所示是壓氣機(jī)運(yùn)行工況兩次進(jìn)入喘振區(qū)域的總體圖像,圖中的第一個(gè)通道顯示的信號為動態(tài)壓力傳感器的壓力信號,第二至第四的三個(gè)通道所顯示的信號為PCB的聲音傳感器采得的聲音信號。圖中所顯示的橫坐標(biāo)為時(shí)間,縱坐標(biāo)為壓力信號的幅值。從圖中可以清晰地看到,聲音信號在整個(gè)過程中有兩個(gè)明顯的變化的部分,這表征著壓氣機(jī)進(jìn)入了喘振區(qū)域。

表1 壓氣機(jī)運(yùn)行工況表
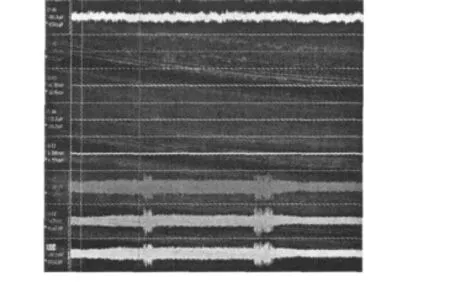
圖2 聲音信號整體圖像
圖3所示是壓氣機(jī)第一次進(jìn)入喘振時(shí)聲音信號的局部圖,從圖中可以看到在進(jìn)入喘振區(qū)域后,雖然存在著很多的噪聲干擾,但是進(jìn)入喘振時(shí)的聲音信號存在一定的波動,與喘振之前的信號比較,進(jìn)入喘振時(shí)的聲音信號出現(xiàn)了較大的振蕩波形的。
試驗(yàn)給出了兩次喘振,每次喘振和喘振前的幅值計(jì)算結(jié)果如表2所示。
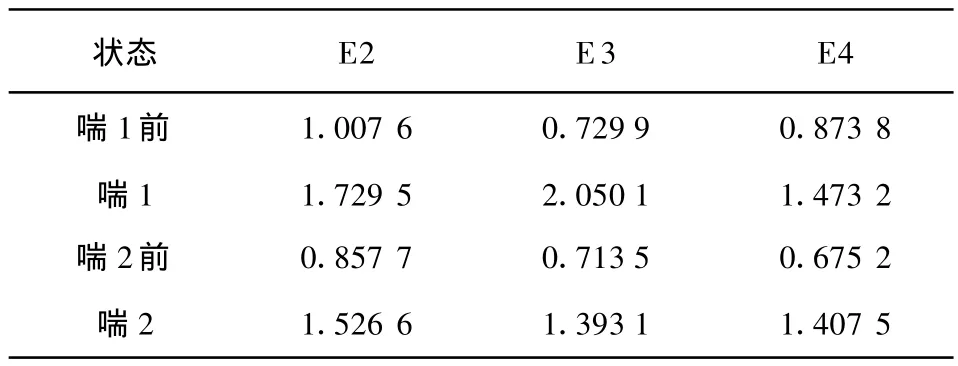
表2 兩次喘振的信號幅值 V
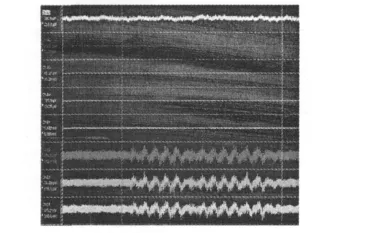
圖3 聲音信號局部圖像
從表中可以看到,每次喘振時(shí),聲音傳感器所測得的幅值都發(fā)生了明顯的變化,聲音信號的幅值出現(xiàn)大幅的增加,增加的比例最大的超過180%。
3 信號的進(jìn)一步處理
為了得到壓氣機(jī)運(yùn)行工況進(jìn)入喘振區(qū)域時(shí)聲音的頻譜特征信號,本文將采用快速傅里葉變換和小波變換對收集的噪聲信號進(jìn)行處理分析,并將喘振特征信號從噪聲中提取出來。
3.1 快速傅里葉變換
傅里葉分析可以分析出采集所得的時(shí)域信號的頻譜和能量譜特征,本文把原始數(shù)據(jù)中每次壓氣機(jī)進(jìn)入喘振和進(jìn)入喘振前5 s的聲音信號截取出來進(jìn)行對比處理,然后對截取的信號進(jìn)行fft變換,第一次接近喘振邊界前5 s和喘振時(shí),1#聲音傳感器所測得信號的fft變換見圖4和圖5。
圖4和圖5表征的是聲音信號在不同頻率段的振幅情況,可以看到壓氣機(jī)在喘振時(shí),信號的fft變換在50 Hz之前頻率段出現(xiàn)了明顯了波峰,可以認(rèn)為在第一次喘振的的頻率在50 Hz以內(nèi),喘振前和喘振時(shí)大于50 Hz信號幅值雖然有些差別但是波形相似,可以認(rèn)定為背景噪聲信號。
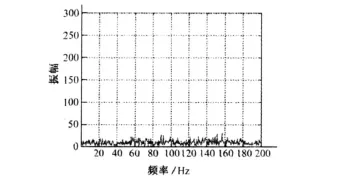
圖4 第一次喘振前數(shù)據(jù)fft變換圖
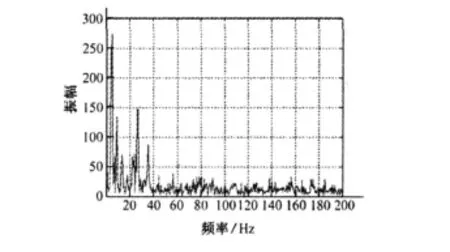
圖5 第一次喘振時(shí)fft變換圖
圖6和圖7是第二次接近喘振前和喘振時(shí),2#聲音傳感器所采集到得信號進(jìn)行fft變換圖,與第一次喘振一樣,也可以認(rèn)為喘振的頻率在50 Hz以內(nèi)。

圖6 第三次喘振前數(shù)據(jù)fft變換圖
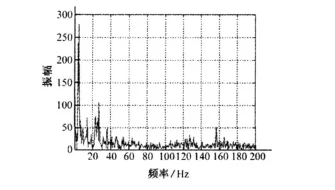
圖7 第三次喘振時(shí)數(shù)據(jù)fft變換圖
對照圖5和圖7以及表2可以看到,壓氣機(jī)發(fā)生喘振時(shí)不同傳感器所采得的信號幅值有一定的差別,但是在fft變換所得到的頻譜中并沒有明顯的差別,可以確定第一次喘振的頻率在50 Hz以內(nèi)。
根據(jù)1#聲音傳感器的數(shù)據(jù)對第一次喘振的聲音信號進(jìn)行功率譜的分析,結(jié)果如圖8所示。
從圖中可以看到,在50 Hz以下的信號頻率尤其是在20 Hz以下的低頻區(qū)域出現(xiàn)了明顯的能量聚集。
3.2 小波變換
小波分析的目的是對采得信號進(jìn)行去噪處理,由于喘振發(fā)生在低頻區(qū)域,為了防止低頻成分的影響和滲入所以選擇中心頻率較高的小波基,即采用Daubechies(dbN)小波系中db8系的小波對信號進(jìn)行處理,并使用7層信號分解,保證噪處理有著較好的效果。圖9是對2號聲音傳感器所采得在第一次進(jìn)入喘振時(shí)的聲音信號進(jìn)小波變換后得到的圖形,其中橫坐標(biāo)顯示的為時(shí)間,縱坐標(biāo)顯示的為振幅。
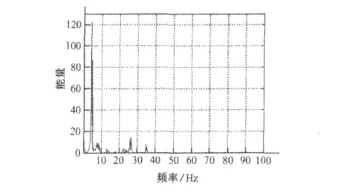
圖8 第一次喘振信號能量譜
圖中d1到d7分別為第一層到底七層小波分析的,a7為小波分析的近似信號。從a7信號中可以看出,開始一段信號較為平穩(wěn),表明壓氣機(jī)的運(yùn)行點(diǎn)還沒接近喘振區(qū),信號突然出現(xiàn)了劇烈的波動,表明已經(jīng)進(jìn)入了喘振區(qū),可以確認(rèn),對低頻區(qū)域的聲音信號使用db8系列小波7層分解可以較好的去除噪聲,提取出聲音的特征信號。
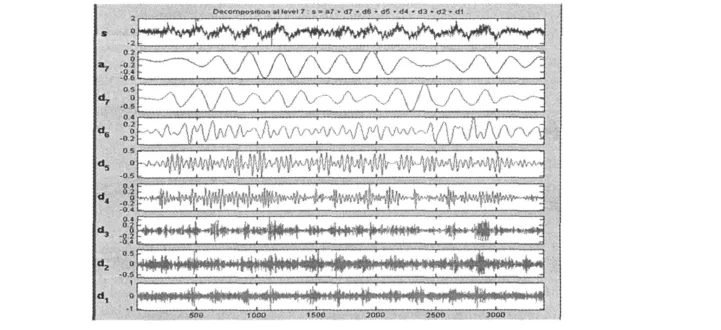
圖9 第一次喘振信號小波分解
4 結(jié)論
通過此次壓氣機(jī)特性的試驗(yàn)和分析結(jié)果,可以得到以下結(jié)論。
(1)在壓氣機(jī)運(yùn)行工況進(jìn)入喘振時(shí),聲音信號有著明顯的變化,所以可以通過聲音信號識別壓氣機(jī)是否進(jìn)入喘振狀態(tài)。
(2)壓氣機(jī)進(jìn)入喘振狀態(tài)下的聲音信號的特征頻率范圍在50 Hz以下,根據(jù)相應(yīng)的功率譜可以更準(zhǔn)確地確定發(fā)生喘振的頻率,但振幅比功率譜的變化更為顯著。
(3)對進(jìn)入喘振區(qū)的低頻區(qū)聲音信號進(jìn)行小波分解時(shí)使用db8系列的小波進(jìn)行7層分解可以有效地對聲音的特征信號進(jìn)行提取,為生產(chǎn)中利用聲音信號監(jiān)測壓氣機(jī)狀態(tài),以及為故障的診斷提供了有價(jià)值的依據(jù)。
[1]居太亮,彭啟宗.基于任意麥克風(fēng)陣列的近場聲源三維定位算法研究[J].信號處理,2007,23(2):231-234.
[2]陳露明.嘈雜背景下的聲源定位及語音分離實(shí)現(xiàn)技術(shù)的研究[D].成都:電子科技大學(xué),2005.
[3]MORINI M,PINELLI M,VENTURINI M.Acoustic and Vibrational Analyses on a Multi-Stage Compressor for Unstable Behavior Precursor Identification[C]//ASME Turbo Expo 2007:Power for Land,Sea,and Air(GT2007),2007.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
