淺談自動控制系統校正實驗的Simulink仿真研究
2010-10-10 00:30:28周浩淼
唐山學院學報 2010年6期
馬 壯,周浩淼
(唐山學院信息工程系,河北唐山 063000)
淺談自動控制系統校正實驗的Simulink仿真研究
馬 壯,周浩淼
(唐山學院信息工程系,河北唐山 063000)
針對自動控制原理中系統校正方法進行簡要介紹,并以串聯校正為例,對校正裝置的設計與實驗實現提出了具體的處理方法,對響應進行數據采集并與Simulink仿真結果比較得出結論。
自動控制;被控對象;系統校正
0 引言
自動控制系統的校正是《自動控制原理》最重要的章節之一,掌握校正裝置的設計與實驗實現可以提高學生的綜合分析與設計能力,使學生全面了解系統校正的目的和意義。
本文以清華科教儀器廠的XMN2Ⅱ型自控原理學習機和輔助實驗教學軟件CAE2PCI3.0數據采集為例,簡要介紹校正裝置設計的基本原理,并對實驗實現提出了具體實驗方案和給出真實實驗結果,并與Simulink仿真結果進行比較,得出結論。
1 系統校正的基本原理
通常自動控制系統可分為被控對象、控制器、監測環節[1]。被控對象WO(S)是由系統所應完成的具體任務決定的;控制器是人為設計的,用來滿足系統控制指標的要求;監測環節是用來檢測輸入輸出量的變化,是系統形成閉環的必要條件。一般情況下,原有系統不能滿足實際要求的各項性能指標,為改善系統的動、靜態性能而引入附加裝置,此附加裝置稱為校正裝置即控制器WC(S)。校正裝置的選擇及其參數整定的過程,稱為系統的校正。
系統校正的方法很多,有串聯、并聯、反饋、前饋等等,本文以經典串聯校正為例,其校正的基本原理如圖1所示[2],其中 X(s)為系統輸入;Y(s)為系統輸出。

圖1 系統校正的基本原理

其中,S-傳遞函數的算子;K-系統增益。其模擬電路如圖2所示。

圖2 被控對象模擬電路
2 校正前系統分析
經分析,原有系統的動態結構圖(數學模型)如圖 3所示。

圖3 被控對象的數學模型
圖3中 T=RC為系統的時間常數;K為局部反饋增益。
原有系統(R=1 MΩ,C=1.0μF,K=0.4)加入單位階躍信號,系統的階躍響應曲線如圖4所示。未校正系統的超調量σ%=50%,上升時間tr=2.4 s,調節時間ts=16 s。

圖4 系統校正前階躍響應曲線
3 系統的校正
實驗要求加入超前校正裝置使系統相位裕量不小于500°,增益裕量不小于10 dB,同時保持靜態速度誤差系數不變。
3.1 校正裝置的確定
若原有系統不符合性能指標要求,需采用串聯引前校正裝置。其傳遞函數為

式中α=R1/(R1+R2),KC為校正裝置的增益。引前校正裝置對應的模擬電路如圖5所示。

圖5 引前校正裝置的模擬電路
3.2 校正后系統的特性分析
系統校正后的模擬電路如圖6所示。將校正環節串聯到運算放大器OP1后面,也就是結構圖里面的前向通道上的WC(S)的位置上。
經過計算可知,KC=1.05,校正后系統階躍響應曲線如圖7所示,其性能指標為:σ%=35%,tr=1.5 s,ts=8.5 s。模擬電路校正前后比較:系統性能指標有所改善,但實驗結果與要求的性能指標有一定的差距,這是因其模擬電路存在一定的系統誤差所致。
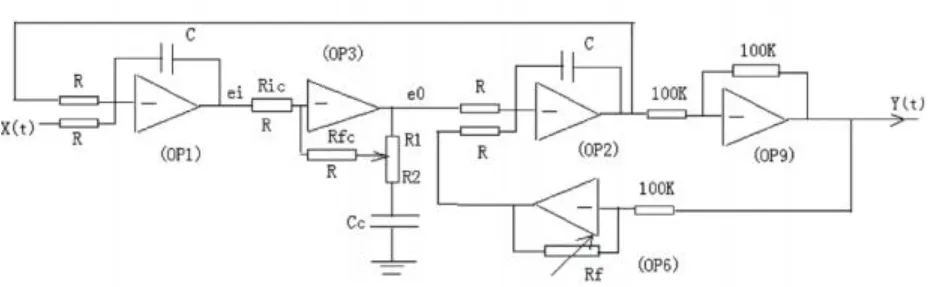
圖6 校正后的模擬電路

圖7 系統校正后階躍響應曲線
4 Simulink仿真
4.1 利用Simulink建立仿真文件
MA TLAB是矩陣實驗室(Matrix Laborato ry)的簡稱,是美國Math Works公司開發的商業數學軟件,主要用于算法開發、數據可視化、數據分析以及數值計算的高級技術計算語言和交互式環境中。而Simulink是MA TLAB最重要的組件之一,它提供了一個動態系統建模、仿真和綜合分析的集成環境[3]。
打開MA TLAB軟件,在Command窗口輸入Simulink,即可進入仿真環境[4]。在Continuous,Sinks,Sources,Math Operations和Signal Routing模塊中找到相關的原件,將其拖動到新建文件中,連接好輸入和輸出,此程序如圖8所示。

圖8 Simulink仿真程序圖
4.2 系統校正前后響應的仿真結果
在Simulink環境電位器阻值不變的情況下,改變 R1和R2的值可以得到不同性能的響應曲線,從中可選取較好的情形作為選擇校正裝置的依據。
當 R1=R2=50 kΩ時,σ%=40%,tr=1.3 s,ts=7.5 s;當 R1=20 kΩ,R2=80 kΩ時,σ%=47%,tr=1.7 s,ts=12.5 s;當R1=90 kΩ,R2=10 kΩ時,σ%=27%,tr=1.6 s,ts=6.3 s。圖9為校正前系統的 Simulink仿真曲線。若 R1+R2增加為200 kΩ,且α=0.1時,其仿真結果如圖10所示,系統的性能指標為σ%=15%,tr=1.5 s,ts=4.2 s。

圖9 系統校正前仿真結果

圖10 系統校正仿真結果
4.3 校正方法分析
校正前:系統仿真結果與模擬電路實際結果基本一致;校正后:通過模擬電路得到的結果系統性能雖得到改善,但與系統要求有一定差距;而通過Simulink仿真,當參數變化為R1+R2=200 kΩ,α=0.1時,參數性能指標完全符合系統的要求,所以可以通過Simulink仿真來改善模擬電路調節裝置的參數,在完成控制要求的前提下可達到良好的控制效果。
5 結束語
本文采用模擬電路實驗和Simulink仿真兩種方法對二階系統進行了串聯校正實驗,結果表明Simulink仿真較模擬電路實驗更簡單、靈活、易行,與實際模擬電路的實驗結果能夠達到同樣的控制效果。
[1] 龍駒,張廣溢.MA TLAB語言在自動控制系統校正裝置設計中的應用[J].四川工業學報,2003,22(1):19 -21.
[2] 周昱英.基于Matlab/Simulink控制系統校正器的設計與仿真[J].南京工業職業技術學院學報,2003,3(3): 17-20.
[3] 張紅蓮.基于MA TLAB的控制系統校正環節的優化設計[J].自動化與儀器儀表,2000(2):22-23.
[4] 張平.MA TLAB基礎與應用簡明教程[M].北京:北京航空航天大學出版社,2001.
(責任編校:李秀榮)
Discussed shallowly Simulink Research of the Compensation Experimen t for Automatic Con trol System
MA Zhuang,ZHOU Hao-miao
(Department of Info rmation Engineering Tangshan college,Tangshan 063000,China)
This paper introduces the compensation methods of a control system in Automatiac Control Theroy,gives a design and experiment method for composition with the example serial-compensation,and draw s the conclusion by collecting data and comparing them with the results of simulation by Simulink.
automatic control;controlled object;system compensation
TP273;TP217
A
1672-349X(2010)06-0041-03
2010-09-30
馬壯(1977-),男,講師,主要從事自動控制系統與自動化技術的理論和應用研究。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
發明與創新(2016年38期)2016-08-22 03:02:52
