偏心連桿平衡抽油機測試系統的研發
2010-11-15 02:50:58張要賀李東明
采礦技術 2010年6期
張要賀,李東明,王 毅
(湖南有色重型機器有限責任公司, 湖南長沙 410000)
偏心連桿平衡抽油機測試系統的研發
張要賀,李東明,王 毅
(湖南有色重型機器有限責任公司, 湖南長沙 410000)
針對 CYL25A偏心連桿平衡抽油機研制了一測試系統,該測試系統通過對平衡塊的位置、電機電流和鏈條拉力的實時監測和記錄,反映抽油機的性能和運行狀況。數據處理時應用了Mat Lab軟件,繪出了相應參數之間的關系曲線,并進行了相應的分析。數據采集卡是試驗臺硬件構成的主要部分,所需采集的各參數信號類型都要與之相匹配,因此編碼器和稱重儀輸出的信號要經過調理轉換為電壓信號。
偏心連桿;平衡抽油機;測試系統;硬件設計;數據處理
CYL25A偏心連桿平衡抽油機是湖南有色重型機器有限責任公司研發的新型抽油機。項目以原有鏈式倍程抽油機為基礎,并結合我公司創新提出的偏心連桿平衡原理而開發的新型節能抽油機產品。為了檢測抽油機在各種復雜環境下的運行狀況和適應工況的動態平衡調節能力,設計了一測試系統來監測和記錄抽油機的關鍵參數。在測試系統中用液壓油缸替代工作載荷,通過調節油缸壓力大小來模擬真實的工作負載的變化,以檢測抽油機的各種性能。
1 偏心連桿抽油機工作原理及其特點
抽油機是有桿抽油系統的地面動力傳動設備,主要為抽油桿提供連續、可靠的往復抽油動作。當抽油桿上移時,懸點承受抽油桿自重、柱塞上部液柱重量以及一定量沉沒壓力的作用,此時由抽油機拖動抽油桿上行,抽油機對抽油桿做正功;抽油機轉過拐點后,懸點被釋放,抽油桿在油中受重力的作用下行并拖動懸點下移,平衡塊開始上行,抽油機進入儲能階段[1~3]。
CYL25A偏心連桿平衡抽油機的功能與其他抽油機相同,其工作原理比較簡單,由動滑輪柄支撐動滑輪順時針循環轉動,并拖動鏈條做伸縮變換。動滑輪座與平衡座固定在主機底座上,2個機座在水平方向上錯開安裝,成 1個偏心值,這個偏心值的設定是本抽油機的關鍵所在。抽油機在底座上的位置可以調整,平衡塊和配重也是可調的,此外偏心值的調整可以很方便的改變抽油機的輸出參數,以適應各種工作環境,最終達到高效節能的目的。
抽油機沖程的變更通過調節動滑輪的回轉半徑來實現,具體需要調節動滑輪柄的伸出長度。在本機中,動滑輪柄的伸出長度連續可調,其最大和最小伸出長度對應的沖程分別為 2.5 m和 1.5 m。
CYL25A型抽油機主要具有以下技術特點:
(1)平衡效果好,節能顯著;
(2)調整范圍大,能適應較大工況范圍的油井作業;
(3)調節方便人性化;
(4)運行可靠性高。
2 偏心連桿抽油機測試系統的硬件設計
CYL25A型抽油機的測試系統主要是監測抽油機的供電電流和豎直桿的拉力,從而來檢驗整個系統的工作性能是否能夠滿足設計要求。此外,該系統還可以用于抽油機正常作業時的實時監測。選用采集卡對所需信號進行采集和儲存,電流信號選用電流傳感器,拉力信號的獲得則通過稱重儀,整個測試系統的硬件如圖1所示。
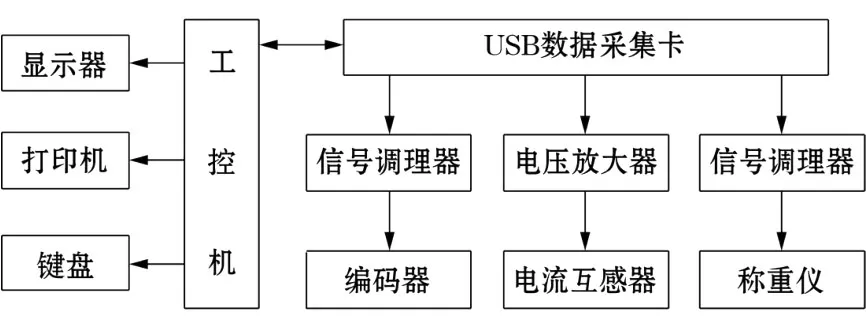
圖1 測試系統的硬件系統
選用的數據采集卡為阿爾泰的 USB2816,輸入的電壓信號為 0~5 V,選用信號調理器將編碼器和稱重儀的輸出信號轉換為電壓信號,且為 0~5 V,稱重儀的工作原理如圖2所示[4]。

圖2 稱重儀的工作原理
使用前首先要依據應變片靈敏系數的不同,按照 Kt=K′ε′的原理對稱重儀的靈敏系數進行調節,本儀器在設計時規定:當靈敏系數為 2.00時,標定值為 15000μ ε,因此在已知 K′的情況下可得:

式中 ,ε′——微應變量;
K′——靈敏系數。
3 數據的采集及處理
采集卡讀取的數據格式為.USB,因此需要轉換成MATLAB軟件能直接處理的.TXT文件格式,Sys Microsoft基礎類應用程序可以實現這一要求。數據采集卡的采集數據的頻率很高,而抽油機的運動速度較低,平衡塊每分鐘旋轉 3圈,因此沒必要用到采集的所有數據,這就需要對采集的數據進行取樣[5,6]。為了更好的反映出抽油機運行的真實情況,采用等間距取樣,即每 1000個點取 1個。
使用下面的程序對抽油機調整前后所采集的數據進行處理,結果見圖3和圖4。
程序設計:
clear; %初始化,清除此前數據
A=load(’d:* * * .txt’); %將采集數據裝入矩陣 A
A(:,1)=[]; %刪除矩陣A的第一列元素
B=A(1:1000:end,:); %formulate new array
A=B; %形成新矩陣
B=A(:,1); %取出矩陣 A的第一列元素存入矩陣B
C=B*360/5000; %將電壓量轉化為角度存入矩陣C中
A(:,1)=C; %用角度替代電壓量
B=A(:,2); %取出矩陣 A的第二列元素存入矩陣B
C=B*12.5/5000; %將測試電壓量轉化為真實電流值存入矩陣 C中
A(:,2)=C; %用真實電流值替代測量電壓量
B=A(:,3); %取出矩陣 A的第三列元素存入矩陣B
C=B*20/5500; %將測試電壓量轉化為力存入矩陣C中
A(:,3)=C; %用力的大小替代測量電壓量
A=A’; %矩陣 A轉置
x=A(1,:); %角度作為曲線的橫坐標
y=A(2,:); %電流強度作為一條曲線的縱坐標
y1=A(3,:); %拉力大小作為另一條曲線的縱坐標
plotyy(x,y,x,y1); %繪曲線圖
xlabel(’旋轉角度/度’);%設置x坐標軸
ylabel(’電流強度/A’);%設置y坐標軸
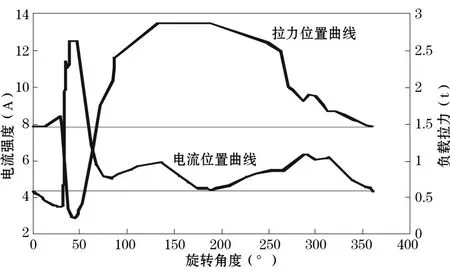
圖3 抽油機調整前拉力、電流位置
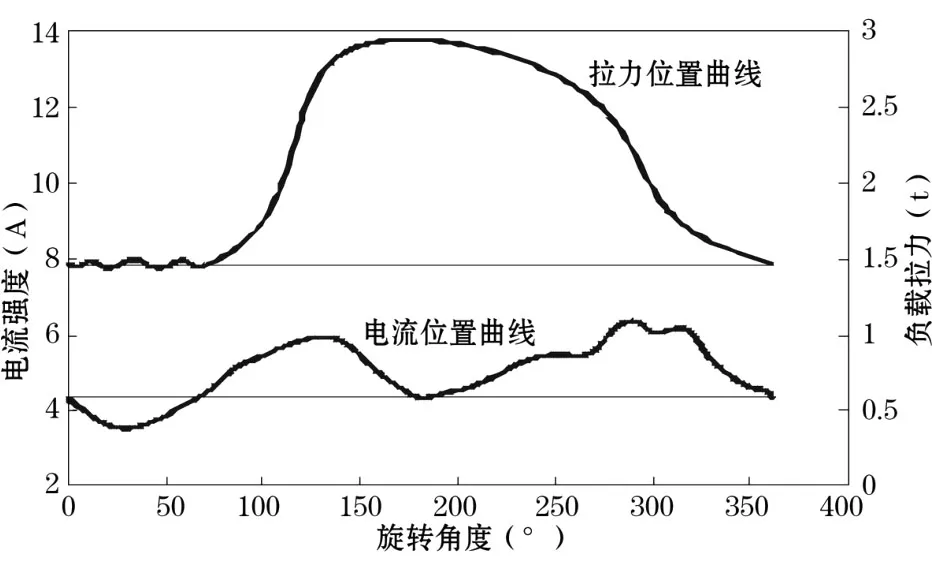
圖4 抽油機調整后電流、拉力位置
4 測試結果分析
在測試系統中,用液壓油缸的壓力來模擬真實載荷,通過調節油缸的壓力來測試抽油機在多種工作負載下的運行狀況和平衡調節的能力。抽油機調整前所得的實驗結果 (見圖3)與理論設計存在較大差異,但曲線的形狀和變化趨勢基本符合設計要求。調整前測試數據與理論設計最主要的區別在鏈條的拉力上,按照理論設計,其曲線應為斜線相連接的 2段水平的直線段,分別表示加載和卸載后的拉力。實測曲線加載后的部分能很好的反映理論設計,而卸載后實測拉力曲線變化很快,在鏈條運動方向轉換的瞬間拉力陡降,出現了極小值甚至為零的情況,與理論設計相差很大。針對以上測試結果對抽油機和液壓系統進行了相應的調整,所得的測試結果(見圖4)比較接近理論設計的要求。所測參數更加穩定,消除了瞬間變化較大的不利情況,抽油機的工作性能更加可靠。
抽油機調整前后的測試結果說明,對 CYL25A偏心連桿平衡抽油機進行測試,不但能對其運行狀況進行實時的檢測,還可以對影響其性能的關鍵參數進行記錄,為抽油機以后的改進提供了數據依據。
[1] 周振春,鄧立新,王艷華.游梁式抽油機節能技術及最新進展[J].承德石油高等專科學校學報,2005,(1).
[2] 張 焱,李 驥.JPCYJC型叢式井智能長沖程抽油機設計[J].石油礦山機械,2005,(3).
[3] 路 懿.有桿式抽油機增程機構的平面連桿綜合法[J].石油學報,2000,(2).
[4] 何 利.現代測試系統模型及體系結構研究[D].西安:電子科技大學,2001.
[5] 甘俊英,陸桂芳.MATLAB在計算機控制系統中的應用[J].五邑大學學報(自然科學版),1996,(2).
[6] 智立甫.基于MATLAB的智能控制系統仿真研究[D].保定:河北農業大學,2004.
2010-08-02)
張要賀 (1983-),男,河南濮陽人,研究生,主要從事牙輪鉆機鉆進控制方面的研究,Email:zyh1030@gmail.com。
猜你喜歡
石油石化節能(2022年12期)2022-12-30 04:45:02
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中國煤層氣(2014年6期)2014-08-07 03:07:05
河南科技(2014年16期)2014-02-27 14:13:19