聯(lián)合載頻和符號同步多普勒補償方法
2010-12-01 02:11:10何成兵黃建國張群飛
探測與控制學報 2010年5期
何成兵,黃建國,張群飛
(西北工業(yè)大學航海學院,陜西西安 710072)
0 引言
近年來,擴頻水聲通信技術受到較大關注,然而,在水聲通信可用頻率范圍內,聲波在水中的衰減與頻率的平方成正比,導致水聲通信的帶寬十分有限[1-4]。中遠程水聲通信的帶寬往往只有幾千赫茲,甚至幾百赫茲,以至常規(guī)直接序列擴頻水聲通信數(shù)據(jù)率極低,僅幾到幾十比特,嚴重影響了通信系統(tǒng)的實用性[5-14]。為提高擴頻水聲通信數(shù)據(jù)率,人們提出M元擴頻通信方法,包括如正交M元直接序列擴頻[10]、M元混沌調頻[12]、M元擴頻時域疊加及多徑聯(lián)合利用新方法[13]。
水聲信道的多普勒效應非常明顯,其根源在于聲波在海水中的低速傳播(約1 500 m/s)以及水下航行器的高速運動。水聲通信中多普勒頻移比無線電傳播中多普勒頻移高幾個數(shù)量級。多普勒不僅造成寬帶水聲通信信號的載波頻率偏移,而且引起碼元符號的展寬或壓縮,進而導致符號同步誤差累積[2]。因此對于移動水聲通信來說,頻率同步和符號同步是同等重要的[2-4]。
本文針對這一問題,提出了一種適用于M元寬帶擴頻水聲通信的聯(lián)合載頻和符號同步的接收機。該接收機能有效解決水下航行器高速運動時其通信信號的多普勒補償問題。
1 M元擴頻水聲通信和解調方法
對于M元擴頻通信,每個用戶分配了M=2k個擴頻碼。根據(jù)要傳輸?shù)膋 bit的二進制信息,在一組偽隨機碼集合中選取某一個偽隨機碼進行載波調制,通過功率放大器及換能器發(fā)射進入水聲信道,其發(fā)射信號可以表示為:

式中,cm是根據(jù)輸入k bit信息(1≤m≤M),從擴頻碼集合C中選取的一個擴頻碼,p(t)是碼片脈沖成形濾波器,L是擴頻碼長度,Tc是擴頻碼片持續(xù)時間。在高斯白噪聲信道中,最優(yōu)接收機為相關器組

式中,r(t)為接收信號。
式(2)所示的相關器組是假設接收機同步的。實際情況下,通常采用正交解調和快速循環(huán)相關技術進行判決和估計,M元接收系統(tǒng)框圖如圖1所示,和常規(guī)的接收系統(tǒng)采用相關處理不同的是,本系統(tǒng)采用循環(huán)相關技術,以獲得相關峰對應的時延。由于每個擴頻碼代表lb M個比特信息,因此M元擴頻通信的數(shù)據(jù)率可表示為:

與直接序列擴頻通信相比,其數(shù)據(jù)率提高lb M倍。
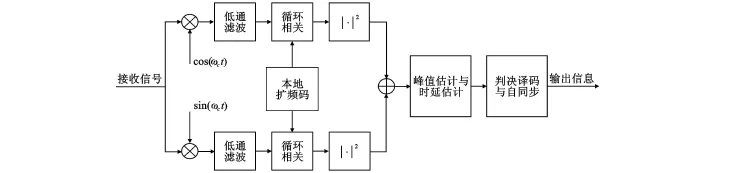
圖1 用于M元擴頻移動通信的接收端框圖Fig.1 Receiver structure for M-ary mobile spread spectrum underwater acoustic communication
2 M元寬帶擴頻水聲通信的多普勒效應
對于寬帶水聲信號,多普勒頻移對每個頻率分量的絕對值是不一樣的,將導致接收信號的壓縮或擴展,多普勒的影響通常建模為[3]:

式中,s(t)表示發(fā)射信號和r(t)接收到的具有多普勒頻移的信號,α表示多普勒因子,可表示為:

式中,c是聲速,v是發(fā)射和接收機相對徑向速度。
圖2(a)給出了接收機本地擴頻序列C(0,t)和受多普勒影響的接收擴頻序列C(α,t),圖中α<0;圖2(b)給出了C(0,t)和C(α,t)的滑動相關輸出。受多普勒影響的接收擴頻序列碼片長度可表示為:

式中,Tc為發(fā)射擴頻信號的碼片長度。
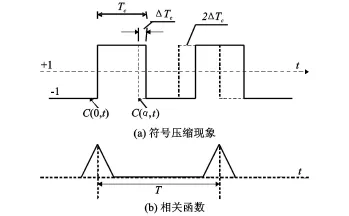
圖2 多普勒效應對擴頻符號和相關函數(shù)的影響示Fig.2 Doppler effect on spread spectrum and correlation function
圖3給出了在載波頻率同步時,不同多普勒因子對相關器輸出的影響。選取的擴頻序列為長度127的偽隨機碼,碼片長度Tc=0.2 ms,采樣頻率80 kHz。多普勒因子為0,0.001,0.005,0.01和0.02,對應的水下航行器相對速度約為0 kn,15 kn,30 kn和60 kn。當相對速度為0 kn時,如圖3(a)所示,其相關峰位置對應中心位置0點;當相對速度為15 kn時,如圖3(b)所示,其相關峰值大小變?yōu)?.85左右,偏移中心位置5個采樣點;當相對速度為30 kn時,如圖3(c)所示,其相關峰值大小變?yōu)?.65左右,偏移中心位置10個采樣點;當相對速度達60 kn時,如圖3(d)所示,相關峰出現(xiàn)譜峰分裂等現(xiàn)象。從圖3中可得出以下結論:隨多普勒因子的增加,其相關峰值變小,同時偏移中心位置量加大。
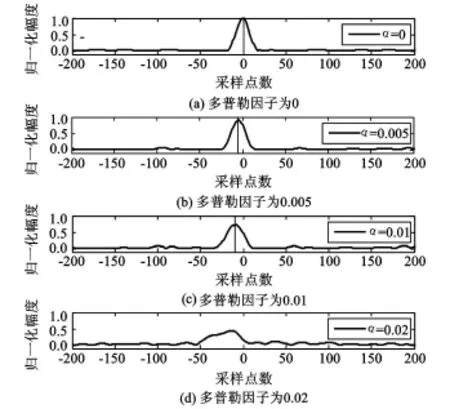
圖3 不同多普勒因子條件下相關器輸出Fig.3 Correlator output for different Doppler shift
3 聯(lián)合載頻和符號同步方法
重采樣是當前較為有效的多普勒補償方法,它在傳輸?shù)臄?shù)據(jù)中插入已知線性調頻信號,估計信號的展寬或壓縮,根據(jù)其估計值對接收信號重采樣,消除信號展寬或壓縮。該方法破壞了原有的信號形式,降低了帶寬效率,且信號延時較大(需要儲存線性調頻信號之間的所有數(shù)據(jù)),計算量較大,實時性較差[2]。結合上述分析,根據(jù)多普勒對M元擴頻信號通信信號及接收系統(tǒng)產生影響的原因和擴頻碼的相關特性,提出M元寬帶擴頻移動水聲通信多普勒補償方法,其步驟如下:1)首先利用文獻[13]所提方法進行精確估計載頻,其估計精度在10-4;2)利用估計的載頻進行正交解調和低通濾波,得到僅受時間展寬或壓縮的基帶信號;3)利用本地儲存的M個擴頻序列,與接收信號作循環(huán)相關處理,并估計峰值偏移量;4)根據(jù)時延偏移估計及界限等條件,對下一碼元符號進行同步修正,可表示為:

即符號同步方法。式中,Δ為時延偏移估計界限,由多普勒因子決定。其目的在于當前一碼元判決發(fā)生錯誤時,表明其相關峰值判決錯誤,這種情況下時延估計錯誤概率較大,因此只有當時延偏移估計值在一定范圍內時,才對下一個碼元進行同步修正。否則,不進行同步修正。通過利用擴頻信號相關函數(shù)的性質,該方法在沒有對接收信號進行重采樣的情況下,進行信號的判決和譯碼,減少了計算量。
4 計算機仿真分析
根據(jù)射線聲學的聲線解算模型,用圖4所示的實測某海區(qū)的聲速分布曲線,在計算機中對水聲信道建模。仿真時,設定發(fā)射換能器位于水下94 m,接收換能器位于水下103 m,通信距離為10 km,信道沖擊響應如圖5所示。從圖中可以看出,此時信道有三條傳播路徑,每條路徑的幅度較大,多徑時延擴展約為12 ms。
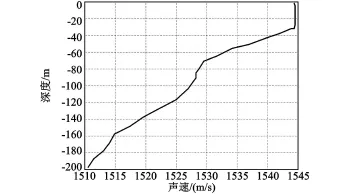
圖4 實測海洋聲速分布曲線圖Fig.4 Sound velocity in ocean
計算機仿真系統(tǒng)參數(shù)分別為:帶寬5 kHz,中心頻率10 kHz,擴頻碼片長度Tc=0.2 ms。為簡化起見,擴頻碼組選長度為127的4個Gold序列。每個碼元攜帶2 bit信息,信息碼元長度為T=25.4 ms,數(shù)據(jù)率為78.7 b/s。仿真時每幀數(shù)據(jù)包括1 000個符號,共10幀。全數(shù)字接收機,接收端采樣頻率為80 kHz,分數(shù)間隔采樣,每個擴頻碼片的采樣點數(shù)為16,時延偏移估計界限 Δ設定為30。利用重采樣技術,模擬產生多普勒頻移信號。在不同接收算法,不同信噪比條件下,統(tǒng)計比較了M元擴頻移動水聲通信系統(tǒng)的誤碼率,如表1所示。
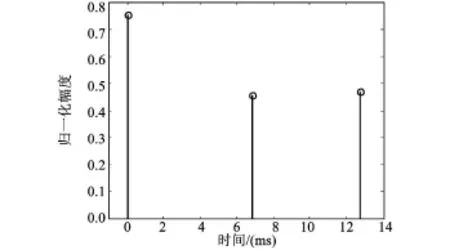
圖5 信道脈沖響應Fig.5 Channel impulse response
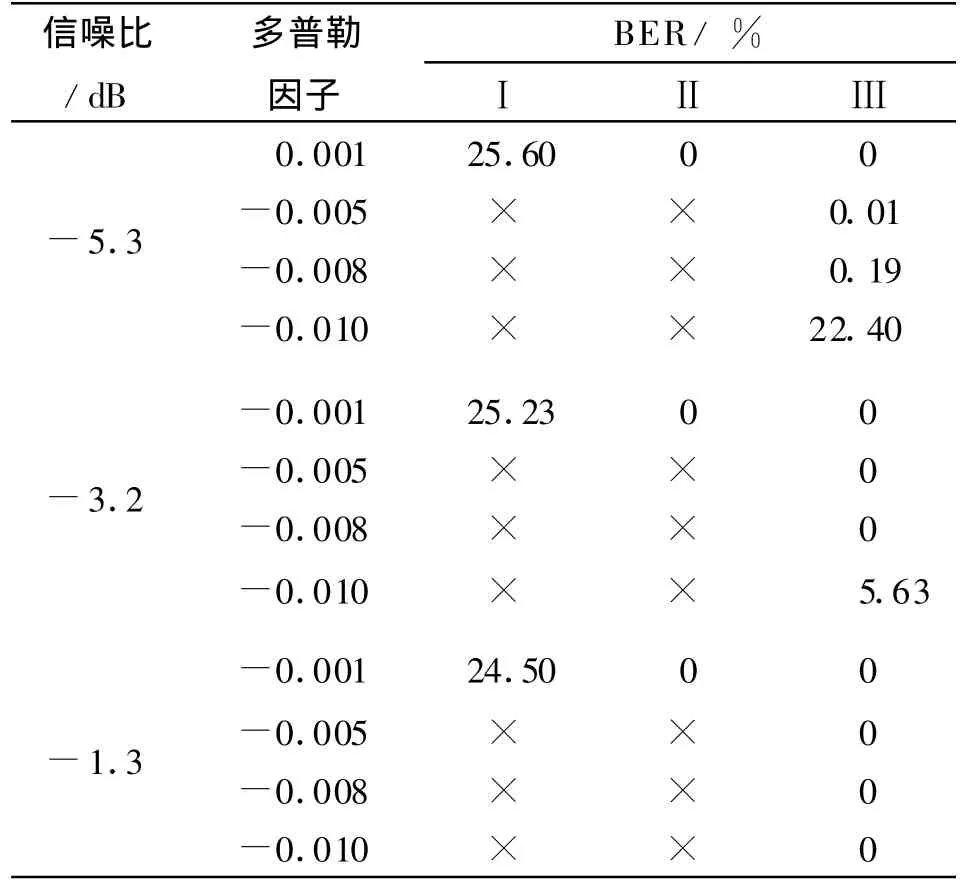
表1 計算機仿真系統(tǒng)誤碼率統(tǒng)計Tab.1 BER of simulation analysis
通過表1誤碼率數(shù)據(jù)比較分析,得出如下結論:
1)僅考慮載波頻率偏移補償時,在各種條件下均無法正確解調譯碼。這是由于在一定的時間(該時間長度由Doppler因子確定)之后,符號不再同步,且隨著每幀符號數(shù)目的增加,其性能將急劇下降。
2)僅考慮符號自同步時,在小多普勒環(huán)境中,仍舊可以實現(xiàn)正確解調和譯碼。這是由于偽隨機擴頻碼具有一定的多普勒容限。當多普勒較大,超過偽隨機擴頻碼的多普勒容限時,無法正確解調和譯碼。
3)聯(lián)合載頻和符號同步方法,在高信噪比條件下,可以實現(xiàn)大多普勒環(huán)境中的正確解調和譯碼。
比較結論1)、2)、3)可知,對于M元寬帶擴頻移動水聲通信系統(tǒng),必須采用符號自同步技術,且符號同步技術可以實現(xiàn)小多普勒環(huán)境下的正確解調和譯碼。實際中,在接收機中首先利用導引信號對載頻進行精確估計,以減少頻偏對符號同步的影響。
圖6給出了當多普勒因子分別為 0、0.002、0.005和0.01時,采用聯(lián)合補償方法,獲得的誤碼率和信噪比曲線圖。從圖6可以看出,當多普勒因子低于0.002(相對速度6 kn)時,其性能與無多普勒時差別在0.5 dB以內;當多普勒因子低于0.005(相對速度15 kn)時,其性能與無多普勒時差別在1.5 dB以內;當多普勒因子為0.01(相對速度30 kn)時,其性能與無多普勒時差別在3.5 dB以內。
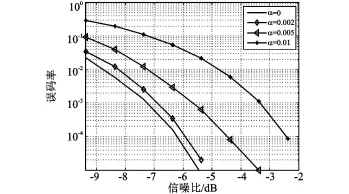
圖6 不同多普勒條件下的誤碼率與信噪比關系曲線圖Fig.6 BER at different SNR and Doppler shift
5 結論
本文提出了聯(lián)合載頻和碼元符號同步的多普勒補償方法。數(shù)值仿真驗證了該方法的可行性,滿足目前水下航行器高速運動過程中的信息傳輸。當相對速度低于15 kn時,其性能與無多普勒時差別在0.3 dB以內,當相對運動為30 kn時,本方法性能與無多普勒時差別在3.5 dB以內。與重采樣技術相比,本文方法計算量小,實時性好。
[1]Kilfoyle D,Baggeroer A.The state of the art in underwater acoustic telemetry[J].IEEE Journal of Oceanic Engineering,2000,25(1):4-27.
[2]Stojanovic M,Catipovis J A,Proakis J G.Phase coherent digital communications for underwater acoustic channels[J].IEEE Journal of Oceanic Engineering,1994,19(1):100-111.
[3]Sharif B S,Neasham J,Hinton O R.A computationally efficient Doppler compensation system for underwater acoustic communications[J].IEEE Journal of Oceanic Engineering,2000,25(1):52-61.
[4]Sharif B S,Neasham J,Hinton O R.Adaptive Doppler compensation for coherent acoustic communication[J].IEE Proc Radar,Sonar Navigation,2000,147(5):239-246.
[5]Freitag L,Stojanovic M,Singh S,Johnson M.Analysis of channel effects on direct-sequence and frequency-hopped spread-spectrum acoustic communication[J].IEEE Journal of Oceanic Engineering,2001,26(4):586-593.
[6]Sozer E M,Stojanovic M,Proakis J G.Underwater acoustic networks[J].IEEE Journal of Oceanic Engineering,2000,25(1):72-83.
[7]Tsimenidis C C,Hinton O R,Adams A E.Underwater acoustic receiver employing direct-sequence spread spectrum and spatial diversity combining for shallow-water multi-access networking[J].IEEE Journal of Oceanic Engineering,2001,26(4):594--603.
[8]Lappierre G,Beuzelin N,Labat J,Trubuil J,Goalic A,Saoudi S,Ayela G,Coince P,Coatelan S.1995-2005:Ten years of active research on underwater acoustic communications in Brest[J].IEEE Oceans 2005,2005(1):425-430.
[9]Stojanovic M,Freitag L.Multichannel detection for wideband underwater acoustic CDMA communications[J].IEEE Journal of Oceanic Engineering,2006,31(3):685-695.
[10]Passerieux J M,Cano D.Robust shallow water acoustic communications based upon orthogonal sequences and real-time channel identification[C]//US:IEEE Oceans'2000,Providence,RI,2000:1 825-1 828.
[11]何成兵,黃建國,張群飛.一種線性調頻擴頻水聲通信的新同步方法[J].應用聲學,2008,27(5):386-390.HE ChengBing,HUANG JianGuo,ZHANG QunFei.A novel synchronization method for LFM based spread spectrum underwater acoustic communication[J].Applied Acoustics,2008,27(5):386-390.
[12]王海斌,吳立新.混沌調頻M-ary方式在遠程水聲通信中的應用[J].聲學學報,2004,29(2):161-166.WANG Haibin,WU Lixin.Long-range underwater acoustic communication based on Chaotic-FM M-ary mode[J].Acta Acustica,2004,29(2):161-166.
[13]HE Chengbing,HUANG Jianguo,ZHANG Qunfei,YAN Zhenhua.Study on M-ary spread spectrum underwater acoustic communication[J].Journal of China Ordnance,2008,4(1):26-29.
[14]何成兵.UUV水聲通信調制解調新技術研究[D].西安:西北工業(yè)大學,2009.
猜你喜歡
幼兒園(2021年6期)2021-07-28 07:42:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
小學生學習指導(低年級)(2019年11期)2019-11-25 07:31:48
電子制作(2018年11期)2018-08-04 03:25:42
小學生導刊(2017年13期)2017-06-15 20:29:38
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56