全球導航星座星間鏈路技術發展建議
2010-12-27 08:53:54林益明何善寶鄭晉軍初海彬
航天器工程 2010年6期
林益明 何善寶 鄭晉軍 初海彬
(北京空間飛行器總體設計部,北京 100094)
1 引言
當今,世界上有4 大全球衛星導航系統(GNSS),分別是美國全球定位系統(GPS)、俄羅斯全球導航衛星系統(GLONASS)、歐洲伽利略(Galileo)系統和我國北斗(Compass)系統。在全球衛星導航系統中,維持較高的衛星軌道和鐘差確定精度,是確保導航接收終端獲得系統要求的定位或授時精度的關鍵。通常獲得精確軌道和鐘差參數需要在全球范圍布設大量地面站進行連續觀測,而我國目前尚不具備這樣的全球性戰略地理資源。因此,我國迫切需要建設導航星座星間鏈路來彌補這一不足。
在全球導航星座內部建設星間鏈路后,通過少數的監測站即可獲得精密軌道參數,星間鏈路還可以增加星歷注入頻度,而這兩點均直接影響導航定位精度。當注入數據無法上注到星上導航任務處理單元時,通過星間距離觀測值和預報星歷、時鐘數據可以提高星座自主運行能力。此外,地面站的測控信息可以通過星間鏈路進行傳輸,可大大增強地面站對星座的測控管理能力。
導航星座星間鏈路涉及到通信/電子、微波/天線、計算機/網絡、結構/機構、軌道/定軌、控制/航天器總體設計等多學科多專業,技術難度大。國內目前對導航星間鏈路的研究正在進行,文獻[1-2]對導航星間鏈路的幾何特性(星間距離、俯仰角和方位角)、星間頻段、鏈路預算進行了初步分析,文獻[3-6]對導航星間網絡拓撲與路由技術進行了初步的研究,文獻[7]對GPS 星間鏈路做了較為詳細的描述,文獻[8]提出了星間網絡拓撲的關聯矩陣表示方法。但是這些研究僅著眼于某些技術細節,在導航衛星星間鏈路系統體制層面的戰略性研究顯得不足。
2 國外導航星座星間鏈路的分析
GPS是目前在軌導航星座中唯一實現了星間鏈路的系統,自Block IIR衛星開始,安裝了具有自主導航功能的星間鏈路收發設備。星間鏈路采用時分多址(TDMA)和擴頻體制,星間頻段為UHF(250~290M Hz)。每顆衛星分配1.5s 的時間間隔,用于雙頻測距或通信。對于24顆衛星星座,36s為1個子幀,900s為1個主幀。第0子幀為測距幀;第1子幀用于星間測量偽距誤差修正;第2子幀用于星座測量與處理數據通信;第3子幀為預留時間,可以用于數據處理和通信數據準備;第4~9子幀用于星座衛星星歷及時鐘參數交換;第10~24子幀為星間鏈路信號收發機預留時間,可以用于Kalman 濾波處理和導航電文編制等。GPS ⅡR/ ⅡRM 衛星星間鏈路測距周期可選擇15min、1h、2h、3h、4h和6h,其中1h為缺省值設置。星間測距與通信鏈路由星間信號發射機、信號接收機、饋電網絡、發射天線單元、接收天線單元以及信號與數據處理單元組成。星間鏈路發射采用雙繞螺旋天線,接收采用陣列天線,要求天線波束相位中心穩定,波束邊緣增益可達到7dBi 左右。
GPS 目前的UHF頻段星間鏈路存在如下幾點不足:1)數據速率較低,難以滿足未來更多的需求;2)所選擇的UHF頻段不是國際電聯(ITU)分配給星間鏈路使用的合法頻段,其使用不受保護;3)寬波束的星間鏈路抗干擾能力難以提升;4)單個陣元發射的寬波束星間鏈路對地面UHF頻段合法用戶存在干擾。因此,美國已經計劃在GPS III 衛星上開發高頻段窄波束的星間鏈路。
除了GPS 在發展星間鏈路外,俄羅斯G LONASS 衛星導航系統和歐盟的Galileo 衛星導航系統也在規劃和開發各自導航星座的星間鏈路。
本文將在國外多種類型衛星星間鏈路研究的基礎上,對發展我國全球導航星座星間鏈路提出幾點建議,以期明確國內在導航星座星間鏈路領域的技術發展方向。
國外在通信衛星星座、偵察編隊飛行系統和全球導航衛星星座中均建有星間鏈路,除通信星座外,后兩者均有星間通信和星間測距功能,而且全球導航衛星星座還具有自主導航功能。
3 高頻段星間鏈路是國內空間技術發展的需要
空間無線電技術正在向更高頻段發展,有兩個主要原因:1)更高頻段尤其是Ka 及其以上頻段尚未被大規模開發,干擾較少且易于申請;2)高頻自身也有很多優點,如波長短帶來的設備尺寸小和重量輕。
表1是通常衛星業務的頻率名稱,目前實用的衛星系統基本上都在Ka 及其以下頻段,Ka頻段系統呈現逐漸增加趨勢,美國地球靜止軌道衛星已經開始采用V頻段的星間鏈路系統。
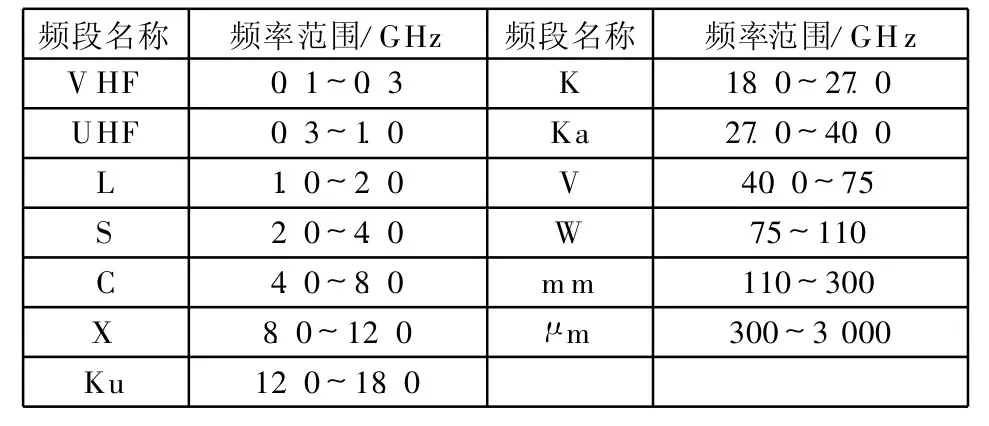
表1 通常衛星業務頻率名稱Table1 Frequency designation of satellite services
按照2008版的《無線電規則》頻率劃分表,國際電聯(ITU)分配給星間研究與操作業務的頻段有:
1)UHF頻段 400.15~401M Hz,410~420M Hz,僅限于空間研究;
2)S頻段2.025~2.11GHz,2.20~2.29GHz,只能用于空間操作、衛星地球探測和空間研究;
3)C頻段5.01~5.03GHz,同時該頻段也分配給航空無線電頻段、衛星下行導航頻段;
4)Ka頻段(含表中部分K頻段)22.55~23.55GHz,24.45~24.75GHz,25.25~27.5GHz
和32.3~33G Hz 均分配給星間使用;
5)V頻段54.25~58.2GHz 和59~71GHz 均分配給星間使用;
6)毫米波頻段116~123G Hz,130~134GHz,167~182GHz,185~190GHz 和191.8~200GHz均分配給星間使用。
另外,激光譜段也有分配星間使用的,光譜波長為0.8~0.9μm,1.06μm,0.532μm 和9.6μm 的光譜可用于星間鏈路[9]。
結合國際電聯以往分配星間鏈路的頻段來看,現在分配給星間鏈路使用的頻段數目在增加,而且總的帶寬也在增加。表2是國外具有星間鏈路的典型空間系統采用的星間鏈路頻段。
從表2可以看出國外星間鏈路有UHF、S、Ku、Ka 和V頻段,而且新一代的系統逐漸采用Ka 和V頻段。
從技術本身發展趨勢來看,星間鏈路也在向更高的頻段、更寬的帶寬和更大的信道容量三個方向發展。導航衛星采用Ka 和V頻段星間鏈路有明顯的優點:1)符合國際電聯頻率使用規范,可申請、受保護;2)可用帶寬寬,約20GHz,是低頻可用頻段的100倍,通信容量大;3)大氣對該頻段無線電波吸收能力強,不易受地面干擾;4)天線波束窄,具有很強的抗干擾特性;5)波長小,射頻設備尺寸小和重量輕,易于星載使用;6)受等離子體影響較小,可以單頻測距且星間測量精度高。雖然在Ka 及其以上頻段的研制基礎相對較低頻段要薄弱,而且還將面臨窄波束帶來的工程實施難題,但是高頻段星間鏈路是空間無線電技術的發展方向,也能更好滿足系統對星間鏈路的需求。

表2 國外星間鏈路典型頻段Table2 Representative frequency of worldwide inter-satellite links
4 星間天線與衛星總體的聯合設計是工程實現的關鍵
導航星座星間鏈路的設計與衛星總體設計是密不可分的,尤其對于窄波束體制的星間鏈路而言。星間天線與衛星總體的聯合設計將是工程實現的關鍵。
1)星間鏈路天線與星座網絡拓撲的聯合設計
全球衛星導航系統一般都是中高度地球軌道(MEO)星座,其中GPS系統6個軌道面,每個軌道面有4顆衛星,GLON ASS系統采用3個軌道面,每個軌道面需要8顆衛星,Galileo系統3個軌道面,每個軌道面9顆衛星,我國Compass系統也包含有多顆MEO衛星組成的全球導航星座。
在GPS 現有的UHF頻段星間鏈路系統中采用時分多址的方式,每個時刻只有1顆衛星發送廣播數據或測距信息,拓撲簡單,星間鏈路天線的內外張角與拓撲的互相約束也較為簡單。如果全球衛星導航系統采用高頻段的窄波束天線,每顆衛星將有多個窄波束天線,這時星間鏈路天線與網絡拓撲關系復雜,需要總體設計解決。
星座網絡拓撲的設計將緊密圍繞星間鏈路通信與定軌功能需求,同時又受到星間鏈路天線工程實施的約束。星座網絡拓撲的確定又將對天線的某些指標提出需求,比如增益、波束寬度、掃描角度和掃描速度等。
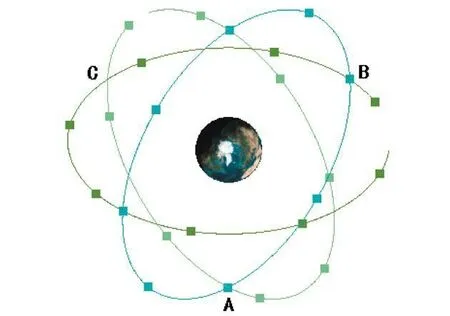
圖1 標準的Walker(24/3/2)導航星座Fig.1 Constellation of Walker(24/3/2)
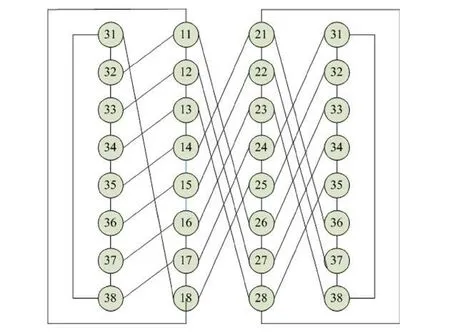
圖2 星間鏈路連接關系Fig.2 Atopology of crosslinks
舉一個例子來說明天線掃描角度與星座網絡拓撲的約束關系。圖1是標準的Walker 24/3/2 星座構型圖,假設異軌道面之間的星間鏈路天線掃描角度限制在±60°,可以通過簡單的仿真分析(見圖3和圖4,為軟件仿真所得)得到衛星11(即第一軌道面第1顆衛星)與異軌道面衛星的可見時間,如果需要建一個持續可見的星間鏈路,則衛星11 必須從衛星24、衛星37、衛星21 和衛星34 中選取建立鏈路。圖2即是滿足異軌道面星間鏈路天線掃描角度小于±60°、同軌道面天線掃描角度小于±70°的一個網絡拓撲示意圖。圖2中同軌道衛星首尾相連,為便于鏈路清晰顯示,第三軌道面畫了2 列,每顆衛星均為4條窄波束天線。圖3和圖4的仿真結果同時也考慮了剔除地球及其周圍電離層以后的可見性。
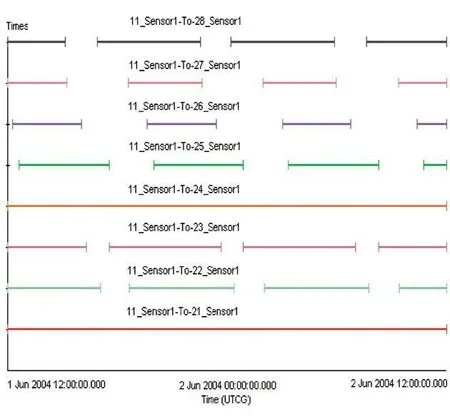
圖3 衛星11 相對衛星2j 的天線間可見性(計算機仿真圖)Fig.3 Antenna visibility between satellite 11 and satellite 2j(by computer simulation)
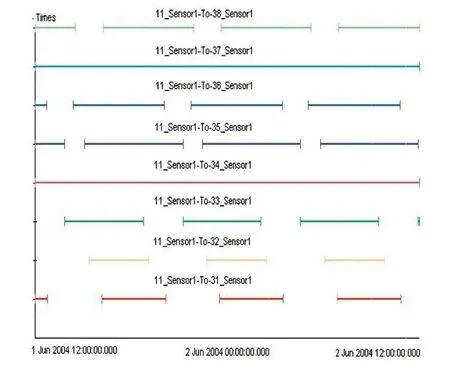
圖4 衛星11 相對衛星3k 的天線間可見性(計算機仿真圖)Fig.4 Antenna visibility between satellite 11 and satellite 3k(by computer simulation)
該例中,如果增加星間鏈路天線的掃描范圍,衛星11 與異軌道面可見衛星數目將增加,固定連接的網絡拓撲將有更多的選擇。同樣,如果天線的掃描范圍很小,則圖2的網絡拓撲將可能在整個周期內無法持續建立鏈路。對于需要建立動態網絡拓撲的情況,星間天線的掃描范圍同樣影響拓撲的建立,反之網絡拓撲對星間天線的掃描范圍有一定的要求。星間鏈路天線的其它多個指標也與網絡拓撲有著密切的相互約束關系,在此不再一一舉例說明。
因此,星間鏈路天線的設計必須緊密結合星座網絡拓撲的設計,而且星座網絡的設計也離不開星間鏈路天線的約束條件。
2)星間鏈路天線與總裝布局的迭代設計
不管是地面電性衛星還是在軌驗證衛星和正樣衛星,其星間鏈路硬件設備最終將裝載在衛星上,而在星間鏈路設備中與衛星總裝布局關系最為密切的就是星間鏈路天線。無論何種類型的導航衛星平臺,衛星對地板上的空間一般都是有限的。在有限的空間里,除安裝星間鏈路天線外,還需要安裝導航有效載荷天線、功率增強天線、測控天線和其它必須安裝的設備等。不同類型的天線安裝在艙板上需要綜合考慮仿真分析視場角遮擋、星間鏈路天線互相干擾以及其它設備對無線電信號的反射等情況。
為了便于說明天線安裝與整個衛星布局的關系,我們畫一個簡單的示意圖。圖5在衛星對地板上僅畫出星間鏈路天線、搜救天線和導航有效載荷天線。紅色區域是星間鏈路天線波束視場范圍,黃色區域是有效載荷天線的視場范圍,粉紅色區域是搜救天線的視場范圍。圖中星間鏈路天線是在極限旋轉角度情況下的視場。顯然,多種設備在衛星對地板上如何布局與視場是否遮擋有著密切的關系,在設計中還要考慮收攏狀態,星間鏈路天線需要與衛星布局反復多次迭代設計。
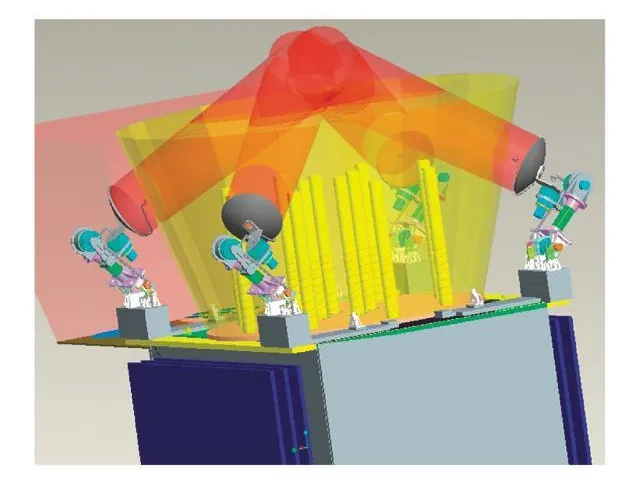
圖5 極限位置下星間鏈路天線視場遮擋情況Fig.5 Antenna visual angle of utmost position
因此,衛星平臺選型確定后對星間鏈路天線的構型、尺寸、波束寬度等元素將有一個約束,衛星總體設計與星間鏈路天線設計存在耦合和迭代關系。
3)星間鏈路天線與衛星姿態的聯合控制
為了保證太陽電池翼對日定向,導航星座衛星在軌道運行過程中需要對偏航角進行實時機動控制,偏航角變換范圍可達180°。對于衛星來說,太陽高度角不同,其偏航角度也相差較大。一年中有兩次太陽高度角很小的時候,衛星在軌道面內運行其偏航角達到最大。星間鏈路采用窄波束天線時,需要對衛星姿態進行高精度控制與測量,并實時將測量角度傳輸給天線控制系統。在星間鏈路天線轉動過程中對衛星姿態產生擾動,由于波束角很窄,為了保證精確指向,需要研究聯合控制技術。
利用衛星高精度星歷數據,星間鏈路天線與衛星姿態的聯合控制技術可以保證開環星間鏈路高精度對準。
5 星間網絡協議的靈活性有利于多種功能的實現
導航星座的星間鏈路承擔著輔助地面精密定軌、增加星歷注入頻度、增強衛星測控管理和支持衛星自主運行等多種功能,這就決定了星間鏈路有多種工作模式和多種數據類型。
導航星座網絡是一種特殊的無線網絡,與地面其它無線網絡相比有4個顯著特點:1)網絡節點之間距離遠;2)網絡節點數目少;3)節點之間不僅傳輸數據,還要進行測距;4)網絡可維修性差。導航星間網絡的這4個特點和導航星間鏈路的多種功能,決定了導航星間網絡需要采取一種靈活的網絡協議,以便于滿足星載靈活組網和空間高可靠性的需求。
國際標準化組織(ISO)開發的開放系統互連(OSI)參考模型將基本的通信功能分成7層,分別為應用層、表示層、會話層、傳輸層、網絡層、數據鏈路層和物理層[10]。對于星間無線網絡,應該盡量簡化其參考模型并適當修改滿足測距功能需求,圖6給出了一個導航星間無線網絡建議的協議分層,包括5層協議。導航星間網絡協議的靈活性不僅體現在應用層,還體現在網絡層等其它幾個分層上。
導航星間網絡協議的應用層,將直接面對星間鏈路的實際應用。雖然星間鏈路僅承擔星間測距與星間數據傳輸功能,但是在星間鏈路上需要傳輸的數據來源有很多種,而且每一種對業務質量(QoS)的要求又不盡相同。比如,遙控指令要求誤碼率小于10-8,且地面發出指令到執行該指令的目的衛星之間通信延遲要求不得小于600ms;而衛星遙測參數下傳地面誤碼率僅要求達到10-6,甚至更差即可,通信延遲要求100s,顯然在應用層設計時需要具有針對性和靈活性。
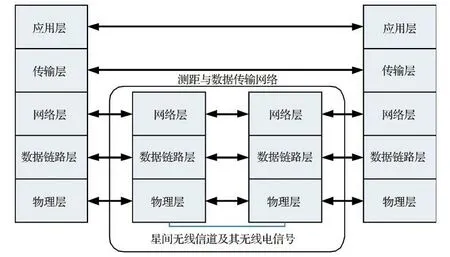
圖6 導航星間無線網絡協議分層建議Fig.6 Suggestion of layered protocol betw een navigation satellites
網絡層的設計同樣需要靈活性。導航衛星在軌運行,難免某個時刻某顆衛星發生小的短暫故障或者更嚴重的故障,這時網絡層中的路由算法就得需要具備一定的抗毀能力,如果設置成固定路由,則許多有用數據將無法通過中斷的鏈路到達目的衛星。
跨層設計是近年來研究的一項新技術,它是指多層協議之間不像以前那樣接口定義清楚后獨立設計,而是在協議的兩層或者更多層之間展開聯合設計,這樣將能獲取全局最優的網絡性能,同時跨層設計也為協議的靈活性注入新的元素和契機。最常見的一種跨層設計就是數據鏈路層與網絡層的聯合設計,可變速率編碼、網絡編碼等新技術可以為網絡協議設計增加靈活性,為不同類型數據提供不同的業務質量。
6 采用狀態一致的星間鏈路設備有利于長期可持續運行
導航衛星系統與其它類型衛星的一個重要區別,就是衛星數目多,且每一顆衛星都要加入到星座中組網。全球衛星導航系統的最終性能不僅決定于單顆衛星的性能,而且還決定于星座組網用戶的幾何精度因子。
導航星座一般采用Walker 星座或者Walker星座的變形,不管是何種星座,均存在第一顆衛星發射到某軌道的某位置處,其同軌道和異軌道導航衛星的相位均確定,不同相位處衛星的發射時間已經基本確定。然而,導航衛星在研制過程中,每顆衛星的研制進度很難與發射順序完全匹配,此時希望每顆衛星的狀態是一致的或者至少是分批一致的。
導航星座正樣衛星組網成功后,還需要在軌備份衛星和地面存儲備份衛星,但是在軌備份衛星的數目是有限的,按照慣例至多每個軌道面備份1顆衛星,這就需要該顆衛星可以替代該軌道面內任意1顆運行衛星。地面存儲備份的衛星數目也是有限的,需要存儲備份的衛星最好可以替代星座中所有軌道中任意1顆衛星。
針對星座組網和備份的需求,導航星間鏈路設備也要具備靈活可變的特點。對于星間鏈路硬件設備來說,主要就是星間頻率配置問題。如果采用收發分時方案,所有的星間鏈路中心頻率可以采用同樣的一個頻點,易于做到星間鏈路設備狀態一致。如果采用收發同時進行的模式,某顆衛星的星間發射頻率和接收頻率是不同的,這樣相互連接的兩顆衛星在軌工作后的收發頻率是互補的。在星間收發頻率配置方案中,還需要考慮星間天線互相干擾問題以及星座網絡拓撲問題。星間鏈路設備作為衛星系統的重要設備,其狀態直接決定衛星狀態。
因此,采用狀態一致的星間鏈路設備是星座持續運行的保證。
7 總結與展望
建立星間鏈路系統是GNSS的發展趨勢,也是建設GNSS的難點與關鍵技術,當前各大GNSS 都在建設或規劃著自己的星間鏈路已經是不爭的事實。本文依據GNSS的特點,開展了導航星座星間鏈路技術的發展戰略研究,提出了建設星間鏈路的幾點建議。
要建設一個可工程實施、高性能且技術先進的導航星座星間鏈路絕非易事,需要星間鏈路與衛星系統的各個層面開展更多的研究。展望未來,希望國內能夠盡早開展以下幾方面的研究,并早日應用到實際工程系統中。
1)提高導航衛星姿態的控制精度與測量精度;
2)加強星間鏈路天線的旋轉機構可靠性研究;
3)開展聯合定軌和自主定軌對星間網絡拓撲的需求研究。
References)
[1]楊寧虎,陳力.衛星導航系統星間鏈路分析[J].全球定位系統,2007,32(2)
[2]楊寧虎,陳力.衛星導航系統星間鏈路空間參數與覆蓋分析[J].飛行器測控學報,2007,26(1)
[3]李振東,何善寶,劉崇華.導航星座星間網絡路由算法研究[C]// 北京:第一屆中國衛星導航學術年會,2010
[4]李振東,何善寶,劉崇華.導航星座的一種動態連接網絡拓撲結構[C]// 北海:中國航天科技集團公司衛星有效載荷技術學術會議,2009
[5]李振東,何善寶,劉崇華.采用Ka頻段的導航星座網絡靜態拓撲結構[C]// 北京:中國宇航學會學術年會,2009
[6]何家富,姜勇,張更新,等.一種具有異軌星間鏈路的Walker 星座網絡拓撲與路由生成方案[J].解放軍理工大學學報,2009,10(5)
[7]鄭晉軍,林益明,陳忠貴,等.GPS 星間鏈路技術及自主導航算法分析[J].航天器工程,2009,18(2)
[8]何善寶,李振東,劉崇華.星間網絡拓撲的二分圖及其關聯矩陣表示法[J].航天器工程,2009,18(4)
[9]張更新,張杭.衛星移動通信系統[M].北京:人民郵電出版社,2001
[10]Alberto L G,Indra W.通信網:基本概念與主體結構[M].樂正友,譯.清華大學出版社,2003
