基于Matlab的平面正弦連桿機構動力學分析
2011-03-26 07:32:36王錫霖許文藝嚴日明
長春工業大學學報 2011年1期
王錫霖, 李 舉, 許文藝, 嚴日明
(中國地質大學(武漢)機械與電子信息學院,湖北武漢 430074)
0 引 言
在機械運動過程中,作用在機械上的力有驅動力、生產阻力、重力、摩擦力、慣性力以及運動副中的反力等。作用在機械上的力不僅是影響機械運動和動力性能的重要參數,而且也是決定強度設計、結構設計的重要因素,所以在設計新機械的過程中,或者為了更合理使用現有機械,都必須對機械進行受力情況的分析。受力分析的目的是確定運動副中的反力以及為使機械按照規定規律運動所需的平衡力或平衡力偶。文中以平面正弦連桿機構為例,對用解析法進行受力的數學分析過程進行了介紹,并且闡述了使用Matlab編程求解方法[1]。
1 平面正弦連桿機構的數學模型
正弦機構如圖1所示。
正弦機構中(常數)
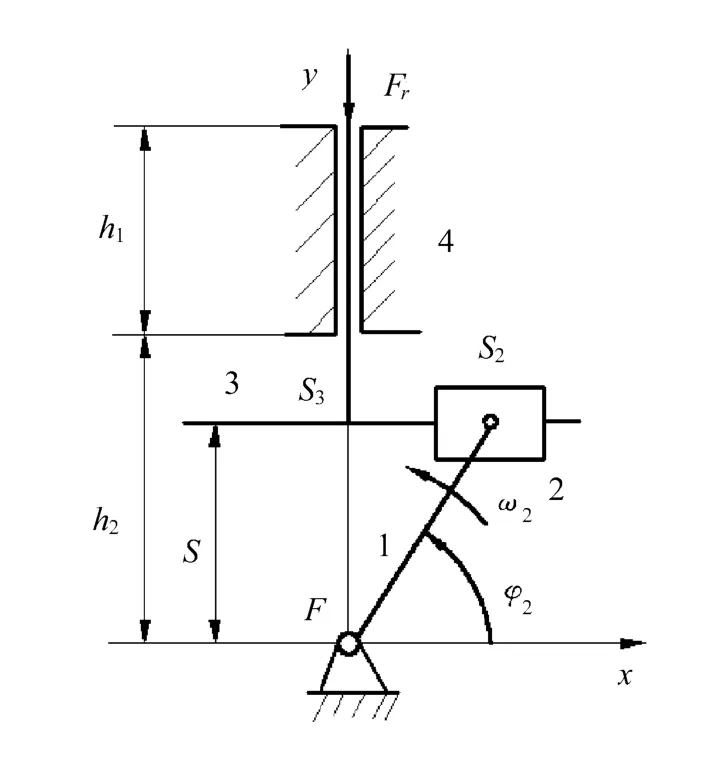
圖1 正弦機構
滑塊2和構件3的重量分別為
質心S2和S3的位置見圖1,加于構件3上的生產阻力為
構件1的重力和慣性力略去不計。需要加在曲柄1上的平衡力偶Mb未知。
分別對3個構件進行受力分析,如圖2~圖4所示[2-4]。
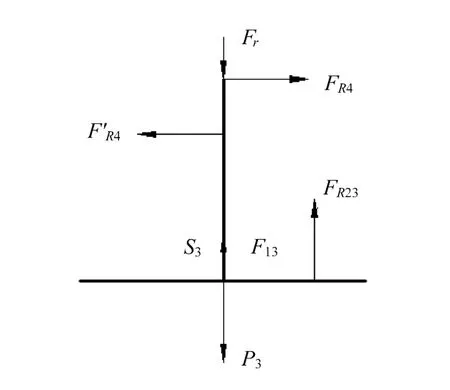
圖2 構件3受力圖
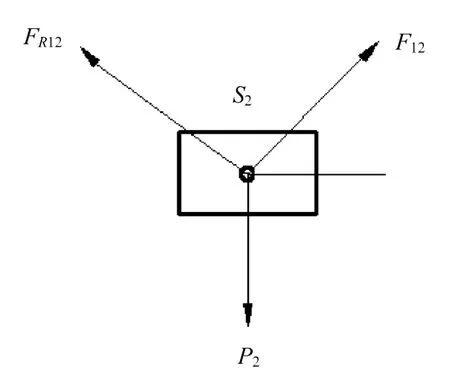
圖3 構件2受力圖
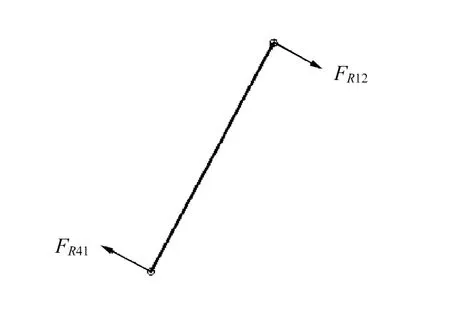
圖4 構件1受力圖
1.1 滑塊2

構件3:
1.2 確定慣性力
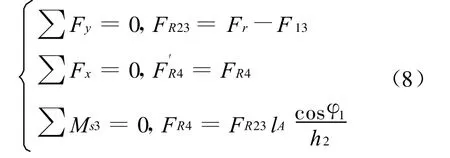
1.3 各構件的平衡方程
構件3:
構件2:
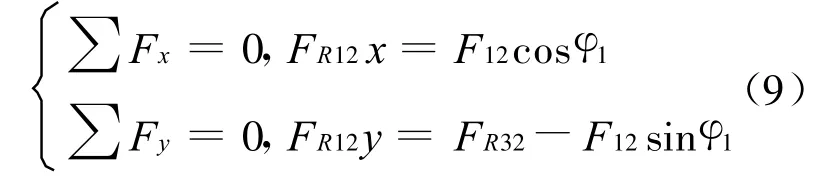
構件1:

式(8)~式(10)中總共有8個方程,8個未知數。歸納出一元八次方程矩陣:
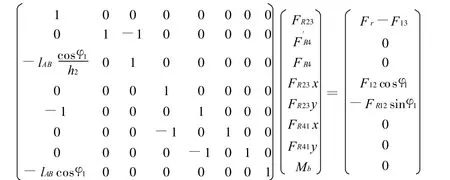
AX=B進而可得:
接下來運用Matlab軟件工具進行分析。
2 M atlab編程
編寫如下名為F的M函數[5-7]:
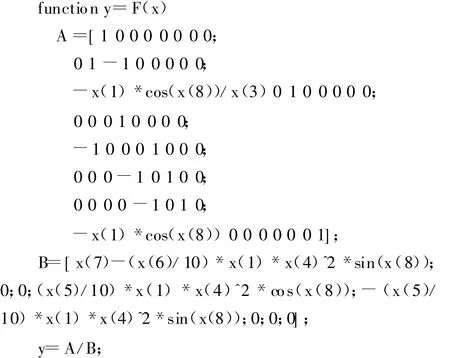
接下來取 φ1=0°~360°范圍,分析其受力的變化規律,在M atlab命令中運行如下命令:

得到的P矩陣的每一行分別是8個未知量在φ1等于36個分量下的值。
3 輸出圖像
按照上述分析結果輸出圖像[8],輸出力FR23和FR32的變化規律圖像,程序如下:
結果如圖5所示。
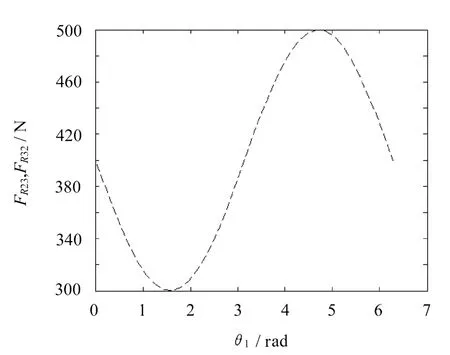
圖5 輸出結果
同樣利用相同的方法可以得到力FR4和的變化規律圖像,如圖6所示。
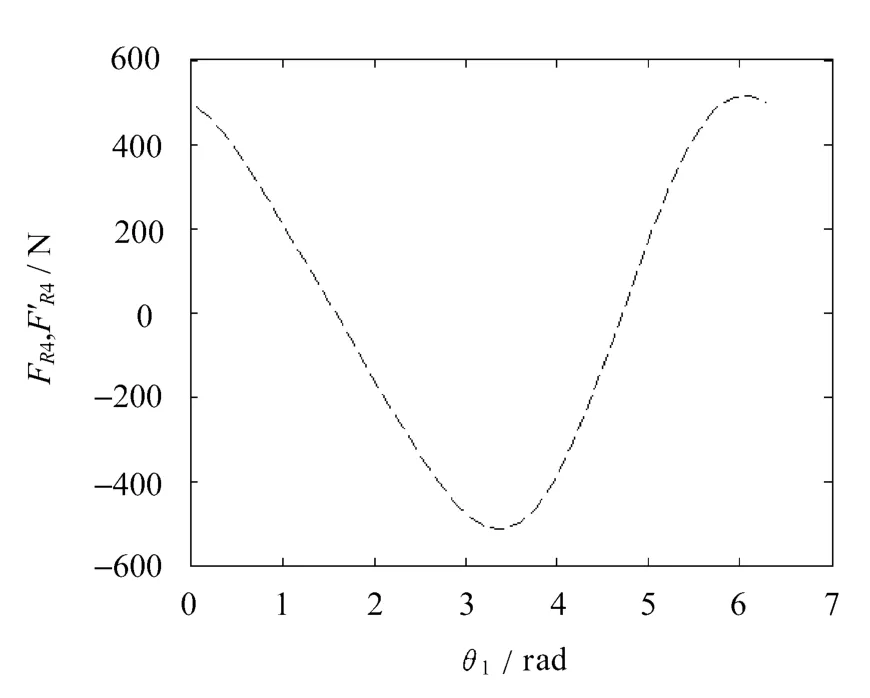
圖6 FR4和的變化規律
力FR12 x的變化規律圖像如圖7所示。
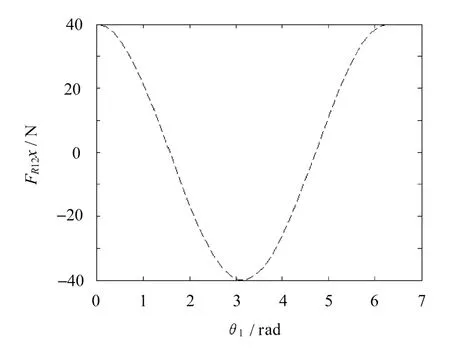
圖7 FR12 x的變化規律
力FR12 y的變化規律如圖8所示。
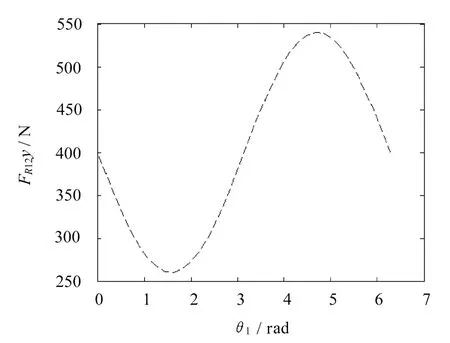
圖8 FR12 y的變化規律
力FR41y的變化規律如圖9所示。
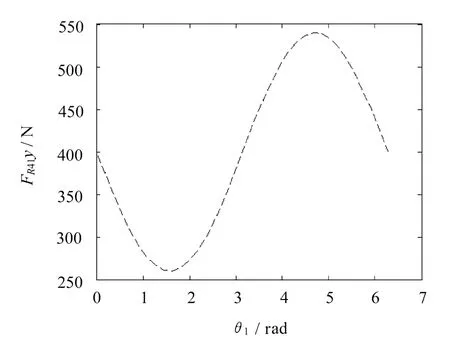
圖9 FR41 y的變化規律
所需平衡力偶Mb的變化規律如圖10所示。
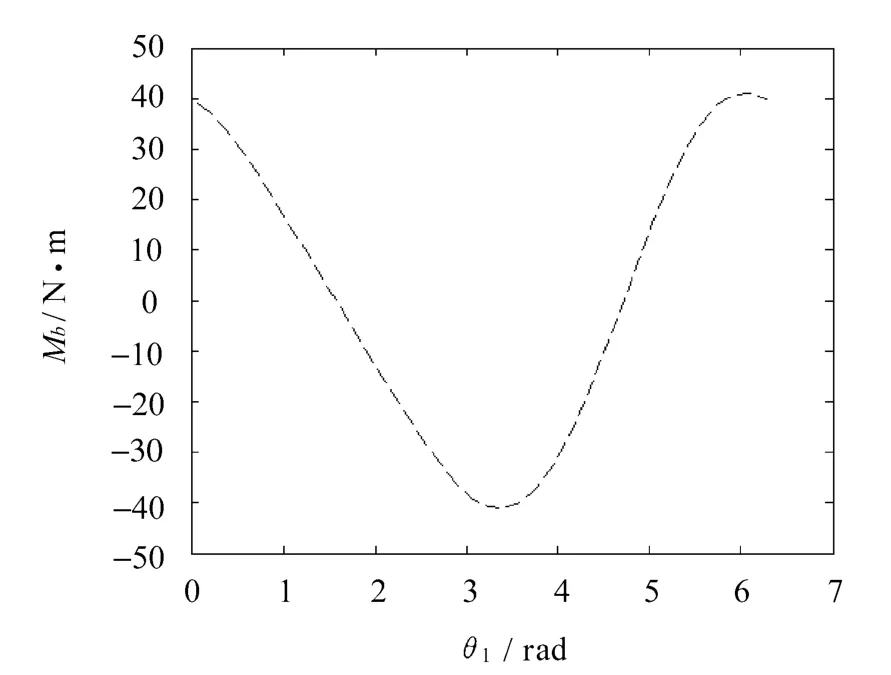
圖10 平衡力偶Mb的變化規律
4 結 語
對平面正弦連桿機構進行動力分析,并且依據其數學模型運用M atlab編程繪制出了曲柄在連續360°的運動過程中各個運動副變化規律及平衡力偶的變化規律曲線圖,使得設計過程中力與位置的關系直觀易懂,對實際設計有一定指導意義。
[1] 孫恒,陳作模.機械原理[M].7版.北京:高等教育出版社,2006.
[2] 雷培,劉云霞.基于M ATLAB的四連桿機構運動分析[J].機械工程與自動化,2009(4):74-76.
[3] 李團結,賈建援,胡雪梅.機械工程中兩類非線性方程組的完全解[J].西安電子科技大學學報:自然科學版,2005,32(1):78-82.
[4] 郭仁生.機械工程設計分析和MATLAB應用[M].北京:機械工業出版社,2008.
[5] 高會生,李新葉,胡志奇.MATLAB原理與工程應用[M].2版.北京:電子工業出版社,2006.
[6] 曲秀全.基于MATLAB/Simulink平面連桿機構的動態仿真[M].哈爾濱:哈爾濱工業大學出版社,2007.
[7] 同濟大學數學系.線性代數[M].北京:高等教育出版社,2009.
[8] 周品,何正風.MATLAB數值分析[M].北京:機械工業出版社,2009.
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
電子制作(2018年18期)2018-11-14 01:48:24
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
山東工業技術(2016年15期)2016-12-01 05:31:22
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
