掩模版升降定位存取機構
2011-03-26 06:38:10馬喜寶董同社
電子工業專用設備 2011年6期
馬喜寶,董同社
(上海微高精密機械工程有限公司,上海201203)
掩模版升降定位存取機構,是光刻設備的一個關鍵模塊,隨著光刻設備向著短波長、大片徑、高分辨率、大焦深、高套刻精度的方向發展,對掩模版的升降速度、定位精度、存放環境、取放版的效率和安全性等提出了更加嚴格的要求,既要滿足SEM I標準掩模版盒的接口要求,同時又要適應具有不同尺寸規格(5英寸、6英寸)和單版或者6版的掩模版盒的需求,以增加互換性和維修性,降低成本,提高效率。
1 功能需求和性能需求
為滿足掩模版盒的鎖定和解鎖,掩模版的升降和定位,掩模版的存放、潔凈等需求,掩模版定位存取機構需滿足表1中的功能需求和性能需求。
2 基本機構
掩模版定位存取主要有兩部分組成:掩模版盒鎖定和解鎖機構;掩模版升降定位機構,如圖1所示。
2.1 鎖定和解鎖機構
鎖定和解鎖指的是把存放掩模版的版盒放置在鎖定和解鎖機構SEM I接口上并由定位銷定位,兩對鎖銷向兩邊移動,將掩模版盒的有機玻璃光罩盒和掩模版架底托分離,同時將有機玻璃光罩盒鎖定在SEM I接口的固定法蘭口上,掩模版架底托隨版盒托板一起進行升降運動,完成解鎖過程;移走掩模版盒時,兩對鎖銷向中心移動,使有機玻璃光罩盒和固定法蘭口脫離,同時將其和掩模版架底托鎖緊,使之成為一體,完成鎖定過程。其構成如圖2所示。
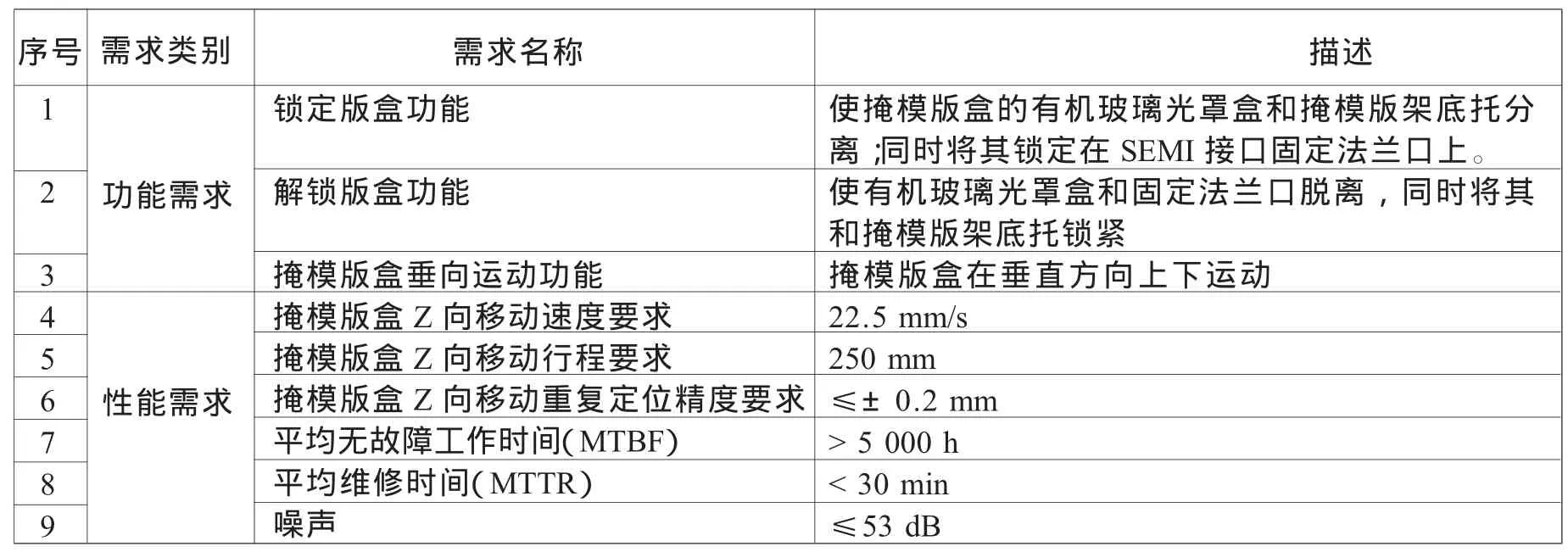
表1 掩模版定位存取機構需滿足的功能和性能
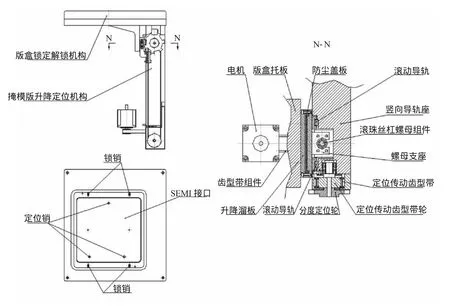
圖1 掩模版升降定位存取機構基本架構
動作原理:導槽滑塊a在電機、絲杠和螺母組成的動力組件的推動下做往復平移運動,安裝在導槽滑塊a斜形滑槽中的導向銷a、b在交叉滾柱滑塊a、b和導槽滑塊a的雙重約束下,在垂直于導槽滑塊a往復運動的方向上同步運動;同時導槽滑塊b通過固定于導槽滑塊a上鋼索的牽引,做往復平移運動,同樣使安裝在導槽滑塊b斜形滑槽中的導向銷c、d在垂直于導槽滑塊b往復運動的方向上同步運動,這樣4個導向銷a、b和c、d相向移動,完成掩模版盒的解鎖和開鎖功能。其優點是:運動副摩擦阻力小,動作靈活;4個鎖銷運動同步且運動距離相等,不會對掩模版盒造成損壞,安全性好。
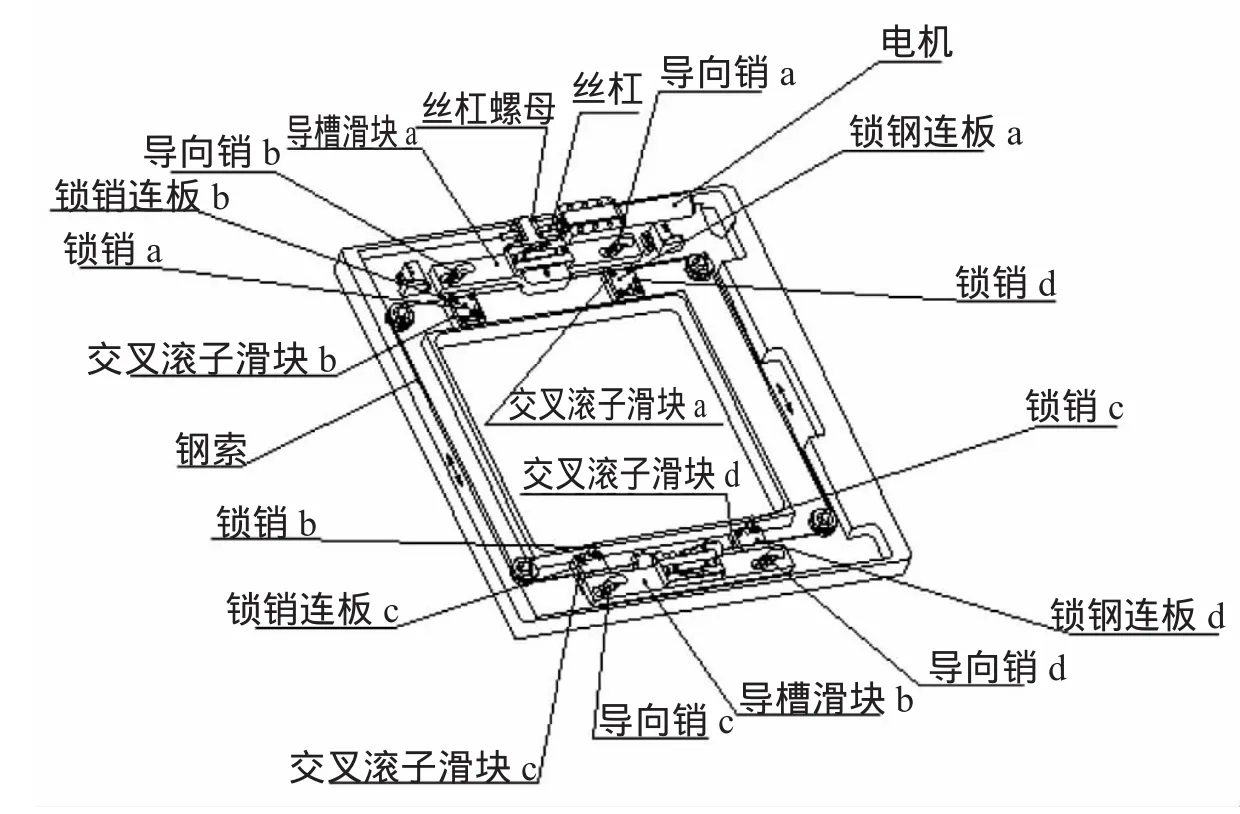
圖2 版盒鎖定解鎖機構
2.2 掩模版升降定位存取機構
掩模版升降定位存取機構是指將解鎖后的掩模版架底托隨版盒托板一起進行升降運動,把放置于掩模版架不同版槽中的掩模版,輸送到一個固定的取放版位,并使版叉上的右安全梁和導向銷順利通過分度定位輪和導向槽,到達取版位置。其構成如圖1(N-N視圖)和圖3所示。
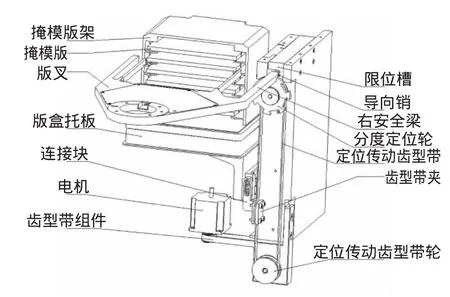
圖3 掩模版升降定位存取機構
動作原理:通過同步齒形帶組件和滾珠絲杠螺母組件構成的傳動系統,把電機的旋轉運動轉化成版盒托板上下運動。版盒托板側面固定有連接塊和齒型帶夾,帶動定位傳動齒形帶驅動分度定位輪繞其軸旋轉。版盒托板上升或下降的距離和定位分度輪轉過分度圓弧長相等。版盒托板移動一個相鄰兩掩模版的距離,分度定位輪就轉過一個分度定位齒槽。分度定位輪上的6個定位槽分別對應掩模版盒中6個不同的掩模版。如果因電機控制失誤,版盒托板上升或下降的距離不等于兩個相鄰掩模版的距離,那么定位分度圓上的定位槽就和處于取放版位置版叉上的右安全梁出現錯位,無法進入掩模版架內取放掩模版。當版叉右安全梁和導向銷通過分度定位槽后面的導向槽時,說明版盒托板運動到位,既實現掩模版的定位存取,也保證在存取掩模版的整個過程中,掩模版處于安全保護之中。在滾珠絲杠螺母組件及兩個滾動導軌之間設計有防塵板,既能降低運動時產生的噪聲,也可防止運動副產生的顆粒物污染環境。
3 結構的可靠性分析
可靠性可用M TBF和MTTR的數值來反映,MTBF值越大MTTR值越小,設備的可靠性就越好,反之就越低。兩種基本結構通過螺栓固定在一起,組成一個完整的掩模版盒升降定位存取機構,其可靠性由以下公式分析計算:
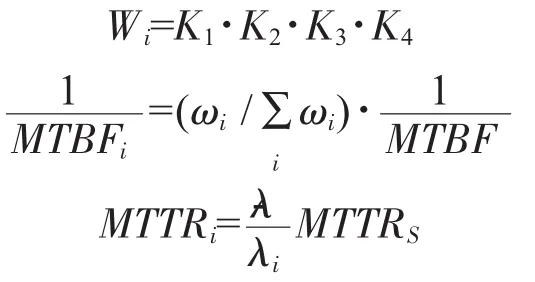
式中:Wi為綜合評分數;
W1為結構復雜度;
W2為技術成熟度;
W3為時間占空比;
W4為環境因素;
MTBF為設計輸入平均無故障工作時間,5000 h;
MTBFi為設計輸出平均無故障工作時間;
MTTRS為設計輸入平均維修時間,30m in;
MTTRi為設計輸出平均維修時間;
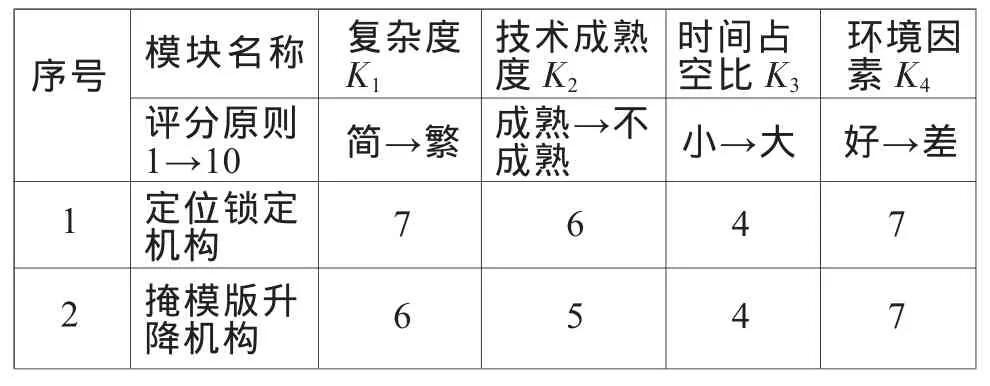
表2 系數計算分配值
從計算結果來看,組成掩模版升降定位存取機構的兩個分部件的遠大于設計輸入的值;小于設計輸入的值,所以整體結構滿足使用要求。
4 結束語
掩模版升降定位存取機構是光刻設備的主要功能模塊之一,隨著光刻集成電路的迅速發展,電路集成度大大提高,工藝層大幅度增多,在光刻設備中對掩模版傳輸和對準的可靠性安全性以及效率等方面要求越來越嚴格,本文從對掩模版升降定位存取機構的需求入手,對結構組成進行分析設計,并對其性能進行了分析驗證。
