遇限削弱積分PID控制算法在船用柴油機調速系統中的應用
2011-04-03 02:01:32朱鴻
船舶 2011年3期
朱鴻
(海軍駐上海滬東中華造船(集團)有限公司軍事代表室 上海 200129)
遇限削弱積分PID控制算法在船用柴油機調速系統中的應用
朱鴻
(海軍駐上海滬東中華造船(集團)有限公司軍事代表室 上海 200129)
遇限削弱積分PID;柴油機;控制器
針對船用柴油機,設計了一個基于遇限削弱積分PID控制算法的調速控制器,給出了該控制器的總體硬件結構框圖,提出該算法的設計思想及其實現方法。仿真及試驗結果證明該算法解決了普通PID算法中超調過大、響應較慢等問題,提高了系統的響應速度。
0 引言
在船用柴油機調速系統中,電子調速器已經逐漸取代電液式調速器,采用單片機技術進行速度控制,具有設備結構簡單、實時響應快、控制精度高等優點。單片機和電子技術的高度發展正促使柴油機調速系統逐步從模擬化向數字化轉變。目前單片機的浮點運算能力和運算速度都較以前有很大提高,在調速控制軟件中已經完全可以實現數字PID算法。80C196KC單片機是Intel公司生產的高性能16位單片機,具有高效率、高速度的指令系統。針對船用柴油機在運行過程中避免出現超調過大、響應速度較慢等現象,本文采用80C196KC單片機作為控制器的CPU,設計了一種基于遇限削弱積分的電子調速系統,以滿足柴油機的調速要求。
1 硬件組成
整個電子調速控制器硬件結構如圖1所示,主要由微處理器80C196KC、A/D模數轉換電路、電流放大電路、測速電路以及看門狗電路等組成。
PID控制系統由PID控制器、執行機構、反饋回路和被控對象組成,PID控制器對給定值R(n)與實際測量值N(n)產生的偏差e(n)進行比例、積分和微分運算后輸出控制量,對受控對象進行控制。隨著單片機技術的發展,在控制系統中一般用數字PID控制器。其中比較經典的數字PID的算法為:
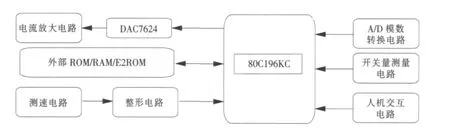
圖1 控制器硬件框圖

式中:n為采樣序號(n=1,2,!);u(n)為第n次采樣時刻的控制器輸出值;Δe(n)=e(n)-e(n-1);e(n)為第n次采樣時刻的輸入偏差值;e(n-1)為第n-1次采樣時刻的輸入偏差值;Kp為比例系數;Ki為積分系數;Kd為微分系數。
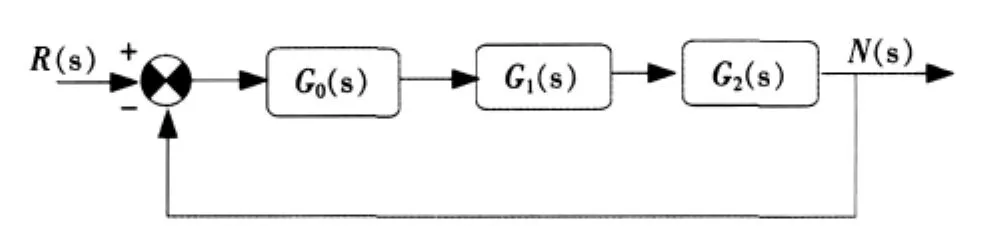
圖2所示是某型柴油機轉速閉環控制框圖,由執行機構調節柴油機油門,由PID算法實現柴油機轉速閉環控制。采用磁脈沖傳感器采集轉速信號,計算得到的轉速反饋值N(n)與設定轉速值R(n)進行比較,其差值經PID算法處理后經并行數據口輸出控制值到DA轉換芯片DAC7264,并通過電流放大電路驅動執行機構,控制柴油機的油門大小,以達到調節轉速的目的。

圖2 轉速閉環控制框圖
PID控制器各校正環節的作用如下:
(1)比例放大環節
比例環節可以對控制系統的偏差信號進行成比例放大,控制器根據放大結果輸出控制量,對被控對象產生較快控制作用。比例系數Kp與系統響應速度成正比。
(2)積分環節
積分環節可以消除系統的穩態誤差,提高系統的控制精度。積分作用的強弱取決于積分時間常數,加大積分系數,可以減小系統穩態誤差,但積分作用過大會產生較大超調,甚至引起振蕩。
(3)微分環節
微分環節能反映出偏差信號的變化趨勢,在系統中引入一個早期修正值,從而加快系統的響應速度,減小調節時間,改善系統的動態響應特性。
在PID控制環節中引入積分的目的,是為了消除穩態誤差,提高控制精度。但在柴油機的起動、負荷突加突卸過程、大幅度增減運轉速度的設定值時,短時間內轉速會有很大的偏差,會造成PID運算的積分積累,出現積分飽和現象,導致系統出現較大的超調量,這是柴油機運行過程中絕對禁止的。
所謂積分飽和現象是指:若系統存在一個方向的偏差,PID控制器的輸出在積分的作用下不斷累積,從而導致執行機構達到極限位置。
如圖3所示,若控制器輸出u(n)繼續增大,執行機構開度會達到最大位置,此時單片機輸出控制量超出了正常運行范圍而進入飽和區,執行機構停留在極限位置而不能隨偏差反向立即做出相應的改變,造成控制性能惡化。進入飽和區愈深則退出飽和區所需時間愈長,這種現象稱為積分飽和現象或積分失控現象。下面就從積分飽和出現的原因來改進PID控制算法。
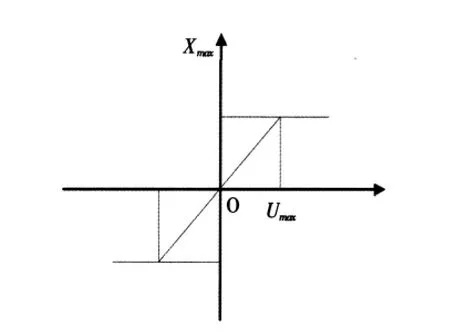
圖3 執行機構飽和特性圖
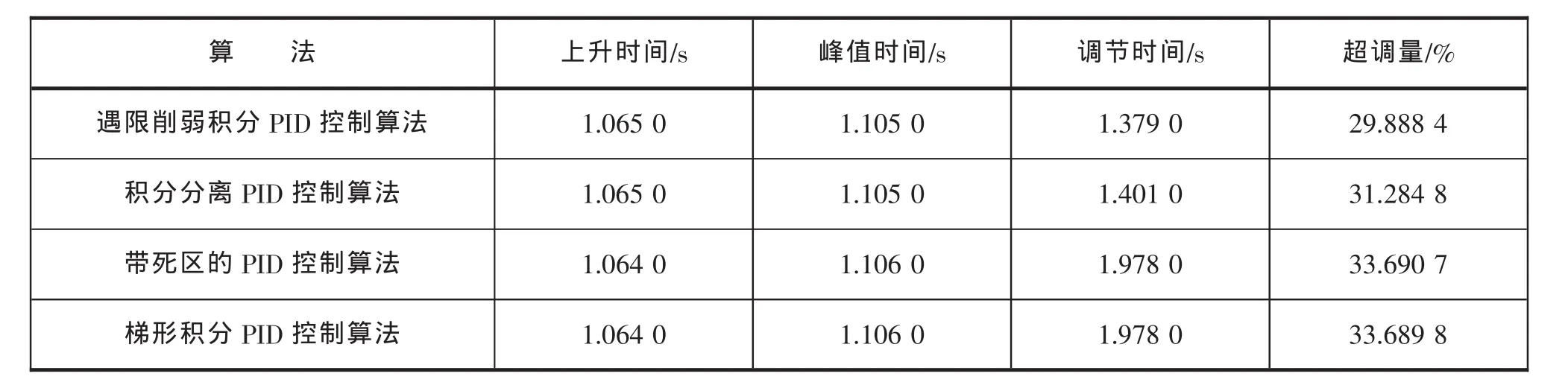
2 遇限削弱積分PID控制算法
數字PID控制算法中積分項過大是引起積分飽和的原因,解決積分飽和的方法有多種,遇限削弱積分是其中的一種。遇限削弱積分的基本思想是:當控制進入飽和區以后,便不再進行積分項的加法運算,而只對積分進行削弱運算。在計算輸出值u(n)時,先判斷u(n-1)是否超出限制值。若u(n-1)>umax,則對負偏差進行計算;若u(n-1) 采用不同PID算法,利用Matlab仿真技術對某二階傳遞函數進行仿真計算,系統輸入為階躍響應,計算結果如下: 表1、表2的數據分別為采用一階保持器和零階保持器時仿真系統的階躍響應性能指標,用于比較驗證所編寫的程序和建立的模型的正確性。 表1、表2均對遇限削弱積分PID控制算法、積分分離PID控制算法、帶死區的PID控制算法、梯形積分PID控制算法的階躍輸出進行仿真比較。 由表格中的仿真數據比較得到:遇限削弱積分PID控制算法較其他PID控制算法,其超調量和調節時間有比較明顯的改善,控制效果較好。 柴油機轉速控制系統模型的傳遞函數框圖如圖5所示,G0(s)為遇限削弱積分PID算法控制器的傳遞函數。對于執行機構來說,輸入的是控制器輸出的0~1 A的直流電流信號I(s),輸出是一定幅值的位置信號控制柴油機油門齒條的大小,可將其近似看成一階慣性環節G1(s);對于柴油機來說,輸入的是執行機構輸出的0~55mm的油門齒條信號w(s),輸出是0~500 r/min的速度信號N(s),也可將其近似看成一階慣性環節G2(s)。整個系統前一環節的輸出即為后一環節的輸入,也就是逐個順次把環節連接起來,這是一個串聯連接方式的系統,總傳遞函數等于各環節傳遞函數的乘積G’(s)=G1(s)·G2(s),所以柴油機轉速控制系統模型的傳遞函數為二階傳遞函數。在實際應用中,經過試驗對比,遇限削弱積分PID控制算法相對其他算法,其超調量和調節時間有比較明顯的改善,控制效果較好。 表1 采用一階保持器時仿真系統階躍響應性能 表2 采用零階保持器時仿真系統階躍響應性能 圖5 轉速控制傳遞函數框圖 本文利用Matlab仿真技術對二階控制系統進行仿真驗證,數字仿真結果證明了遇限削弱積分PID算法能夠縮短調節時間、降低超調量。在柴油機實際調速過程中可以利用該PID算法實現精確的調速閉環控制。遇限削弱積分PID控制算法要根據具體的系統特點來選擇參數。利用單片機實時運算和控制功能可實現柴油機快速穩定的調速功能。 [1]陶永華等.新型PID控制及其應用[M].北京:機械工業出版社,1998. [2]劉金琨.先進PID控制及其MATLAB仿真[M].北京:電子工業出版社,2003. [3]劉叔軍,蓋曉華.控制系統應用與實例[M].北京:機械工業出版社,2006. [4]何濟民.轉速閉環變頻調速系統的建模與調節器參數設計[J].電器傳動自動化,2000,22(1):15-16. [5]董鋒斌.閉環變頻調速系統的一種簡易設計方法[J].電氣時代,2007,(3):124. Application of advanced PID in diesel engine speed control system ZHU Hong advanced PID control algorithm;diesel engine;controller A diesel engine speed controller was designed based on the advanced PID control algorithm.The general hardware structure flowchart for the controller is introduced,and the design and implementation of the algorithm is discussed.The simulation result shows that this algorithm can improve response speed and control accuracy compared with general algorithm. TK421;U262.11 A 1001-9855(2011)03-0059-04 2010-11-29 朱鴻(1968-),男,漢族,工程師,主要從事船舶動力裝置設計研究工作。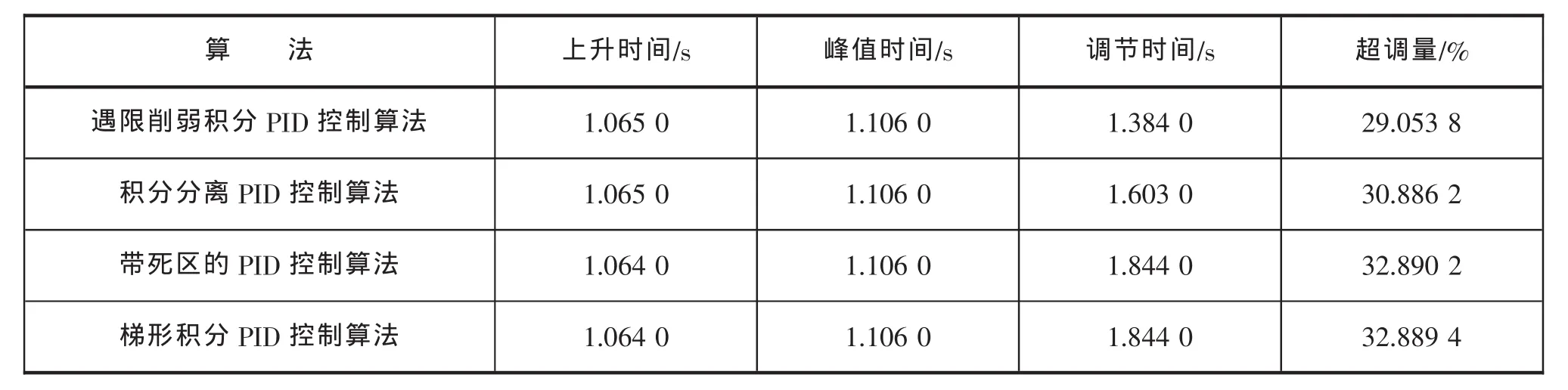
3 結語
(Naval Representation in Hudong Zhonghua Shipbuilding(Group)Co.,Ltd.,Shanghai 200129,China)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
裝備制造技術(2019年12期)2019-12-25 03:06:46
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
電子制作(2018年12期)2018-08-01 00:48:04
家庭影院技術(2017年9期)2017-09-26 03:41:45