汽車EPS系統助力控制策略實現研究
2011-06-02 09:32:54宋曉華
重慶理工大學學報(自然科學) 2011年12期
李 偉,宋曉華
(重慶交通大學機電與汽車工程學院,重慶 400074)
汽車轉向系統經歷了從傳統的機械式轉向系統(MS)到液壓動力轉向系統(HPS)的發展階段。隨著嵌入式系統技術、傳感器技術和現代控制技術的發展,采用新型傳感器和電子控制的電控液壓動力轉向系統(EHPS)、電動助力轉向系統(EPS)已經成為部分車型的標準裝備。隨著對汽車各項性能要求的不斷提高,對汽車轉向系統的性能要求也越來越高,不僅要求低速和駐車時的轉向輕便性,同時也要求汽車高速行駛時的操縱穩定性,然而傳統方式的轉向系統都不能同時滿足低速行駛轉向輕便性和高速行駛操縱穩定性的要求。目前在汽車電子方面的熱門研究課題“電動助力轉向系統”可以解決汽車轉向“輕與靈”的矛盾。此系統是根據轉向盤上的傳感器輸出的轉矩信號和測量的車速信號確定助力電機的目標轉矩值,并通過閉環控制策略使電機施加在轉向軸上的助力轉矩大小快速跟隨目標轉矩值,達到電機為轉向器轉向提供助力的目的。
1 EPS控制系統組成
EPS控制系統主要由MSC1210控制器、傳感器信號采集電路及信號調理電路、電機雙H橋驅動電路等組成,結構如圖1所示。
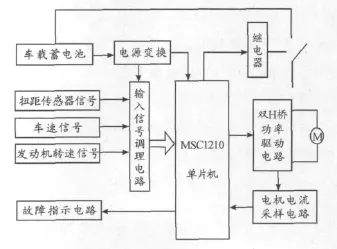
圖1 ECU控制系統總體框圖
1.1 微控制器
微控制器采用MSC1210芯片,它擁有ADC高精度微位移傳感器電路模塊,能完成微弱信號8通道多路切換、信號緩沖、PGA編程放大、24位ΣΔA/D轉換、數字濾波、數據處理、信號校準以及UART通信等功能。MSC1210內部集成有最大32 kB的Flash存儲器。該Flash可分區使用,分別劃分為程序存儲區和數據存儲區,支持在系統編程(ISP),可擦寫/編程10萬次,數據保存時間可達100年。MSC1210還提供了雙數據指針(DPTR),可以加速整塊數據的移動。每個指令周期只包含4個時鐘周期,在訪問外部數據存儲器時,還可以使訪問周期延展2~9個指令周期,以適應不同的外設速度。
1.2 扭矩傳感器
扭矩傳感器是電動助力轉向系統中的一個重要部件,它將測量的駕駛員轉向盤轉矩和方向盤轉角傳給ECU,通過扭桿將轉向盤和轉向器連接起來,建模時將它與轉向盤合為一體進行力學分析。在電動助力轉向器提供轉向助力的狀態下,微型車轉向盤轉矩應在5 N·m以下才能夠滿足輕便性的要求,因此選定測量范圍在10 N·m左右的傳感器。傳感器和信號調理電路在該范圍內進行了多次重復標定,其輸出電壓-轉矩如圖2所示[1]。
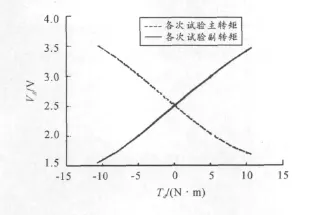
圖2 傳感器主、副轉矩輸出電壓-轉矩
用最小二乘法對圖2中的主轉矩信號數據進行線性擬合,得到主轉矩信號 VA和轉矩 Td的關系

根據式(1)可得

同時計算得其非線性誤差為±3.64%,主轉矩信號遲滯為 ±0.48%,主轉矩信號重復性為±0.52%,以上3項誤差求和后作為主轉矩信號的誤差,由此可得其精度為4.64%。從這個指標可以得知,所選的傳感器基本滿足EPS系統的要求[1]。
2 EPS控制系統的控制策略
EPS控制系統的控制策略算法由電機助力大小控制策略和電機轉矩大小控制策略2部分組成。電機助力大小控制是根據駕駛員對方向盤施加的轉矩大小和車速測定模塊測定的車速大小來確定電機助力的目標轉矩;電機轉矩控制是根據有相應的控制策略計算出的電機目標轉矩值與電機實際輸出的轉矩值進行比較,將兩者之間的差量作為直接控制對象進行閉環控制。
2.1 電機助力大小控制算法
電機助力大小控制算法是控制系統根據駕駛員施加在方向盤和轉向系上的轉矩和當時測定出的車速大小,按照預先設定的助力特性曲線確定出電機助力的目標轉矩值。本系統選用的是折線型的助力特性曲線,該助力特性曲線可用式(3)表示。
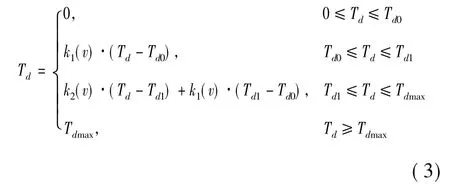
Td0取值大小與駕駛員主觀感受有關系,事先可以根據設計者和駕駛員對轉向系統輕便性和路感的具體要求,通過試驗來綜合確定。參考有關資料,初步取Td0=1.0 N。當車輛動力轉向時,駕駛員作用在轉向系方向盤上的切向力應在20~50 N,設定駕駛員作用在轉向盤上的最大切向力為28 N,根據文獻[2]確定 Tdmax為5.0 N·m。
2.2 助力電機閉環控制算法
本課題采用永磁式直流電動機。如圖3所示,助力電機端電壓U與電感L、電樞電阻R、反電動勢常數Ke、轉速θm、電流大小I和時間t之間的關系為

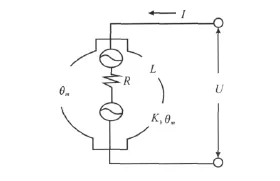
圖3 電機等效電路
由于電流穩定時,電感作用很小,此方程可改變為

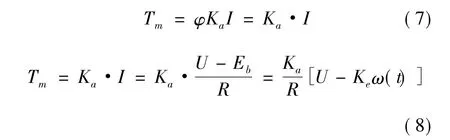
電動機產生的電磁轉矩與電樞電流I和氣隙磁通φ有如下規律:

式中:Ka為電動機的轉矩系數(N·m·A-1);Tm為電機輸出轉矩;Kf為勵磁系數;if為勵磁電流;Ka為電樞系數;I為電樞繞組電流。Kf·if·Ka用Ka來代替,稱Ka為電磁轉矩系數,這樣直流電機輸出轉矩
對電動機機械部分進行受力分析,可以得到

式中:Im為電動機和離合器的轉動慣量(kg/m2);Bm為電動機黏性阻尼系數(N·m·rad/s);θm為電動機的轉角(rad);Tm為電動機電磁轉矩(N·m);Ta為電動機輸出轉矩(N·m)。
在實際的控制系統中,電動機助力轉矩Ta可以表示為

式中Km為電動機和減速機構的輸出軸剛性系數(N·m/rad)。
本課題采用了PD算法的電流控制方法控制電機轉矩大小,將按照電機助力特性曲線確定的電機目標轉矩直接轉換成電機目標電流,再與電流傳感器測得的電機實際電流相比較,求其差值作為控制量,通過PD控制算法對其進行比例和微分修正,通過反饋環節構成閉環控制,再通過控制算法獲得控制驅動電路的脈寬調制信號。與常規的PID控制算法相比,積分部分對電機電流控制影響很小,可忽略。
2.3 控制算法流程
電動助力轉向控制系統控制算法的主程序主要具有狀態參數初始化,系統外部信號(轉向盤轉矩信號、車速信號和電機電流信號)采集,根據程序預設方案計算電機目標電流,與反饋電機電流值比較確定控制量大小,通過PD算法得到控制電機的PWM斬波信號等功能。
本文電動助力轉向系統在軟件實現方面的思想是使用多任務分時調用控制策略,利用計數器定時,設置單個任務執行時間,定時時間到后,程序自動進入中斷服務子程序,根據PID變量的值,可進入不同的子程序執行,每中斷一次可執行一次其中一個子程序,這樣就實現了多任務的分時調用,并且可實時地更新全局變量值,不需要子程序與主程序之間的變量互傳。控制系統主程序流程框圖如圖4所示。

圖4 主程序流程框圖
3 結束語
本文提出了一種電動助力轉向控制系統利用定時器的定時功能實現多任務分時調用的控制方法,定時器每中斷一次就執行一次相應的子程序,使不同任務循環定時執行。該方案易于實現,并且保證了轉向控制系統具有很好的實時性和轉向跟蹤性。
[1]周波.汽車電動助力轉向系統霍爾轉角傳感器[J].重慶理工大學學報:自然科學版,2010(2):21-23.
[2]錢學武,馬明星,徐國民,等.電動助力轉向系統建模及仿真[J].重慶理工大學學報:自然科學版,2010(2):14-17.
[3]季學武,劉學,孫凌玉.電動助力轉向系統電感式轉矩傳感器的研究[J].傳感器世界,2007(2):11-13.
[4]左波.電動助力轉向系統助力特性研究[D].武漢:武漢理工大學,2009.
[5]黃李琴.汽車電動助力轉向控制系統的初步研究[J].汽車技術,2003(6):3 -6.
[6]陶永華.新型PID控制及應用[M].北京:機械工業出版社,2001.
[7]高明,朱懿韜,許南紹.基于轉向盤轉動速度變轉矩控制的電動助力轉向系統[J].重慶工學院學報:自然科學版,2009(2):7-12.
[8]史劍宗,王小青,許南紹.電動助力轉向系統控制策略[J].重慶工學院學報:自然科學版,2009(1):15-18.
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
鴨綠江(2021年35期)2021-04-19 12:24:18
能源工程(2020年6期)2021-01-26 00:55:22
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
金橋(2020年9期)2020-10-27 01:59:44
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
電子制作(2018年11期)2018-08-04 03:25:42
商周刊(2017年17期)2017-09-08 13:08:58