高心墻堆石壩壩面碾壓施工仿真理論與應(yīng)用
2011-06-07 02:15:26鐘登華趙晨生
中國工程科學(xué) 2011年12期
鐘登華,趙晨生,張 平
(天津大學(xué)水利工程仿真與安全國家重點實驗室,天津 300072)
1 前言
高心墻堆石壩施工過程受自然環(huán)境、壩體結(jié)構(gòu)、工藝技術(shù)、作業(yè)方式、機(jī)械設(shè)備等諸多因素影響,具有很強(qiáng)的不確定性和半結(jié)構(gòu)化等特征,難以通過簡單的數(shù)學(xué)解析模型來分析,而施工仿真技術(shù)為研究和分析高心墻堆石壩復(fù)雜的施工過程提供了有效途徑。壩面碾壓作為高心墻堆石壩施工中的最關(guān)鍵工序,也是一個遵循一定施工規(guī)則下的動態(tài)隨機(jī)過程,直接關(guān)系到整個工程的進(jìn)度和質(zhì)量。以往的堆石壩施工仿真研究中[1~7],多以碾壓層為仿真單位,采用施工面積比碾壓機(jī)工作效率來計算碾壓時間。這是一種經(jīng)驗性的、不精確的簡單計算方式,難以全面描述和反映出蘊(yùn)含在碾壓過程中的復(fù)雜內(nèi)部規(guī)律。因此,以高心墻堆石壩中承載施工質(zhì)量和進(jìn)度信息的最小單位填筑單元為研究對象,對壩面碾壓過程進(jìn)行精細(xì)化的仿真分析是十分必要的。文章詳盡分析了高心墻堆石壩壩面碾壓過程,提出了高心墻堆石壩壩面碾壓施工仿真基本原理,建立了填筑單元碾壓施工的仿真模型,為全面分析和控制高心墻堆石壩壩面碾壓過程提供了新的分析方法和科學(xué)依據(jù)。
2 高心墻堆石壩壩面碾壓過程分析
2.1 壩面碾壓系統(tǒng)分解―協(xié)調(diào)
高心墻堆石壩壩面碾壓過程是一項復(fù)雜的動態(tài)系統(tǒng)工程,根據(jù)其動態(tài)特征和內(nèi)部各個環(huán)節(jié)的性質(zhì),可分為碾壓目標(biāo)子系統(tǒng)、碾壓參數(shù)子系統(tǒng)和碾壓施工條件子系統(tǒng)。碾壓包含質(zhì)量和進(jìn)度兩個目標(biāo),質(zhì)量目標(biāo)是指壓實指標(biāo)檢測值滿足控制標(biāo)準(zhǔn),進(jìn)度目標(biāo)是指在滿足質(zhì)量目標(biāo)的前提下盡量追求較短碾壓工期;碾壓參數(shù)是確保大壩碾壓目標(biāo)實現(xiàn)的關(guān)鍵,主要包括碾壓遍數(shù)、碾壓機(jī)行進(jìn)速度、碾壓機(jī)行進(jìn)角度、碾壓機(jī)激振力狀態(tài)、錯距距離等;碾壓施工條件包括填筑單元的形體信息、施工機(jī)械的數(shù)量和型號等,這些因素是進(jìn)行碾壓的基礎(chǔ)條件。
這三個子系統(tǒng)之間既相互影響又相互聯(lián)系:一方面,施工條件決定填筑單元采取的碾壓參數(shù),而碾壓參數(shù)要根據(jù)施工條件的變化而動態(tài)調(diào)整,與之保持相適應(yīng)協(xié)調(diào);另一方面,采取不同的碾壓參數(shù)(如改變碾壓遍數(shù)、錯距距離等)會直接影響填筑單元碾壓目標(biāo)的實現(xiàn),而為了達(dá)到某個控制目標(biāo)則需要不斷的修改碾壓參數(shù);施工條件如形體信息的變化通常會影響填筑單元的碾壓工期,而為了保證填筑單元碾壓目標(biāo)則需要對施工條件進(jìn)行分析。高心墻堆石壩壩面碾壓系統(tǒng)分解-協(xié)調(diào)分析如圖1所示。

圖1 高心墻堆石壩壩面碾壓系統(tǒng)分解-協(xié)調(diào)分析Fig.1 System decomposition-coordination coupling analysis
2.2 填筑單元碾壓過程數(shù)學(xué)邏輯模型
高心墻堆石壩壩面碾壓過程是一個復(fù)雜的隨機(jī)動態(tài)過程,綜合考慮各環(huán)節(jié)之間施工邏輯關(guān)系和各種復(fù)雜約束條件,可建立高心墻堆石壩填筑單元碾壓隨機(jī)動態(tài)數(shù)學(xué)模型:

式(1)中,i為填筑單元編號;P(i)為填筑單元i的碾壓工期;R(i)=[Rs(i),Rm(i)]為填筑單元i的施工條件;Rs(i)為形體信息;Rm(i)為機(jī)械配置;M(i)=[V(t),θ(t),b(t),n(i)]為填筑單元i的碾壓參數(shù);V(t)為碾壓機(jī)隨機(jī)行進(jìn)速度;θ(t)為隨機(jī)行進(jìn)偏移角度;b(t)為隨機(jī)錯距距離;n(i)為碾壓遍數(shù)。

式(2)中,QU[]為碾壓質(zhì)量指標(biāo)檢測數(shù)據(jù)集;QUc[]為碾壓質(zhì)量控制標(biāo)準(zhǔn)集。
3 高心墻堆石壩填筑單元碾壓施工仿真基本原理
3.1 仿真策略
高心墻堆石壩壩面填筑單元一般采用進(jìn)退錯距法進(jìn)行碾壓,碾壓機(jī)從填筑單元的一端沿壩軸線方向向另一端前進(jìn),到達(dá)另一端邊界后沿垂直壩軸線方向進(jìn)行錯距,然后再沿壩軸線方向后退至開始的一端,這一過程反復(fù)進(jìn)行,直到整個填筑單元碾壓合格。可以看出,碾壓機(jī)機(jī)械前進(jìn)、后退以及錯距等事件都是在離散時間點上發(fā)生的,在時間上呈非連續(xù)變化,因此,填筑單元施工系統(tǒng)是一個離散事件系統(tǒng),其仿真為離散事件系統(tǒng)仿真。但由于人為因素對碾壓機(jī)的控制,碾壓過程是一個隨機(jī)過程,碾壓機(jī)行進(jìn)速度、偏移角度是隨時間不斷變化的,每一次的錯距距離以及錯距所用時間也不是固定的。為了準(zhǔn)確描述這一復(fù)雜的動態(tài)系統(tǒng),仿真中對于碾壓過程仿真采用固定時間推進(jìn)法,并以秒為仿真時間單位。通過多次仿真和統(tǒng)計分析,可以得到施工工期和各關(guān)鍵點工期的統(tǒng)計特性。
3.2 仿真模型
在碾壓過程中,填筑單元的狀態(tài)隨著碾壓機(jī)的運(yùn)行發(fā)生變化,從未碾狀態(tài)到已碾狀態(tài)。整個碾壓過程可以看成一個以碾壓機(jī)械為“服務(wù)臺”,填筑單元作為填筑服務(wù)“對象”的隨機(jī)有限源服務(wù)系統(tǒng),填筑單元在碾壓過程中等待各碾壓機(jī)械的服務(wù),其模型結(jié)構(gòu)如圖2所示。
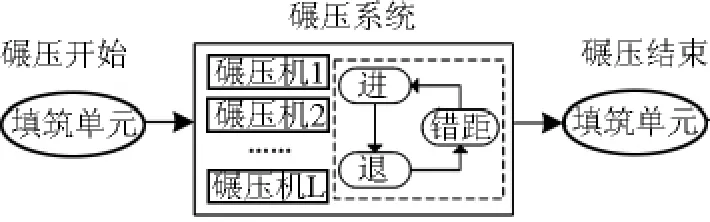
圖2 填筑單元碾壓過程仿真模型Fig.2 Simulation model of the filling unit
3.3 填筑單元碾壓仿真參數(shù)分析
1)碾壓參數(shù)。由于駕駛員的操作水平及不可避免的外力干擾(如:堆石區(qū)的大塊石)等,實際的碾壓速度V并不是定值,而且碾壓軌跡也不是很多條平行的直線,而是波折線。這說明在碾壓機(jī)前進(jìn)過程中,速度V是一個二維的隨機(jī)矢量。同理,由于錯距也是有駕駛員控制的,錯距距離以及所用時間也是隨機(jī)值。因此,各碾壓參數(shù)均是符合某種概率分布的隨機(jī)數(shù)。
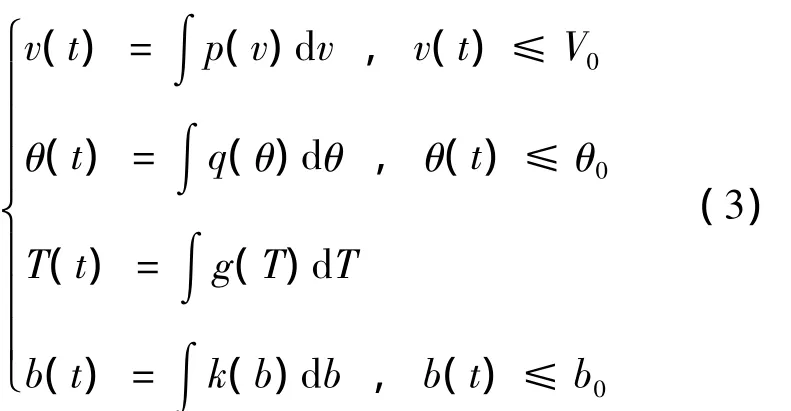
式(3)中,p(v)、q(θ)、g(T)、k(b)分別為碾壓機(jī)行駛速度v、偏移角度θ、錯距時間T和錯距距離b的概率密度函數(shù),可通過對高心墻堆石壩碾壓質(zhì)量實時監(jiān)控系統(tǒng)[8]采集到的實時施工信息數(shù)據(jù)進(jìn)行統(tǒng)計分析得出;V0、θ0、b0分別為速度、偏移角度和錯距距離的最大允許值。
2)碾壓歷時。由于碾壓必須沿壩軸線方向進(jìn)行,錯距沿河流方向進(jìn)行,且要求分段碾壓搭接寬度垂直方向不小于0.3~0.5 m,順碾壓方向應(yīng)為1.0~1.5 m,所以可以根據(jù)仿真過程中實時的碾壓機(jī)的碾壓位置與填筑單元形狀的相對關(guān)系,來判斷錯距的發(fā)生以及碾壓活動的結(jié)束,進(jìn)而計算出碾壓歷時。規(guī)定仿真中的坐標(biāo)體系,順壩軸線方向從左岸到右岸為x正方向,順河向為y正方向。借助外部圖形處理軟件VISUALGEO可以得到填筑單元的邊界坐標(biāo)。
碾壓機(jī)第i次從填筑單元一端至另一端前進(jìn)或者倒退碾壓一次的歷時為:Ti=w

式(4)中,w為本次碾壓中仿真時鐘推進(jìn)次數(shù);Vx為根據(jù)仿真中以秒為步長產(chǎn)生的隨機(jī)速度和隨機(jī)偏移角度計算出的x方向分量;Xi1、Xi2分別為和xw、xw+1在同一y坐標(biāo)下的填筑單元邊界x方向坐標(biāo)。
填筑單元總碾壓歷時:

式(7)中,B為填筑單元的沿河流方向最大寬度;bi為仿真中第i次錯距時的隨機(jī)錯距距離;ti為第i次錯距時的隨機(jī)錯距時間;ΣVy為速度在y方向分量的累計值。
3)碾壓遍數(shù)合格率。碾壓活動結(jié)束后需要計算碾壓遍數(shù)合格率以判斷碾壓質(zhì)量是否滿足控制標(biāo)準(zhǔn)。對于碾壓起始和結(jié)束的條帶,按正常錯距法無法壓到要求的遍數(shù),施工時一般采用前進(jìn)后退不錯距的方法,壓到要求的碾壓遍數(shù)。

碾壓遍數(shù)合格率計算:

式(8)中,num 為n(N(i,j))≥n0的網(wǎng)格N(i,j)的個數(shù);n0為標(biāo)準(zhǔn)碾壓遍數(shù)。
4)補(bǔ)碾時間。當(dāng)碾壓遍數(shù)合格率Q小于控制標(biāo)準(zhǔn)Q0時,需要對填筑單元進(jìn)行補(bǔ)碾。由于需要補(bǔ)碾的部位和遍數(shù)的隨機(jī)性較大,所以文章中認(rèn)為補(bǔ)碾時間為不合格區(qū)域面積的函數(shù),并考慮時間利用系數(shù):

圖3 碾壓遍數(shù)計算示意圖Fig.3 Schematic diagram of rolling number calculation

式(9)中,kt為時間利用系數(shù);t0為固定補(bǔ)碾歷時;n為沿水流方向劃分的網(wǎng)格個數(shù);v為仿真中按秒產(chǎn)生的隨機(jī)速度。
3.4 仿真流程
程序開始時,系統(tǒng)更新仿真參數(shù),初始化模型,然后以單位時間步長推進(jìn)仿真時鐘,產(chǎn)生隨機(jī)速度和偏移角度,根據(jù)碾壓機(jī)在x、y方向上的位置與填筑單元形狀的相對關(guān)系,來判斷下一步碾壓機(jī)的行進(jìn)路線。若達(dá)到填筑單元x方向邊界,則發(fā)生錯距,產(chǎn)生隨機(jī)錯距距離和錯距時間,推進(jìn)仿真時鐘,同時改變碾壓機(jī)行進(jìn)狀態(tài);若達(dá)到填筑單元y方向邊界,則碾壓工作完成。若碾壓未完成,則重復(fù)上一過程直到碾壓完成。碾壓完成后計算碾壓遍數(shù)合格率,如果滿足控制要求,則仿真結(jié)束,輸出碾壓歷時;否則,需計算補(bǔ)碾時間。高心墻堆石壩填筑單元碾壓仿真流程圖如圖4所示。
3.5 模型驗證
文章采用置信度檢驗?zāi)P汀V眯哦确ㄊ欠抡婺P陀行源_認(rèn)中定量分析的一種重要的統(tǒng)計檢驗法[9]。假設(shè)總體服從正態(tài)分布,為建立輸出變量均值E(X)的置信區(qū)間,通常是對系統(tǒng)進(jìn)行固定次數(shù)的獨立重復(fù)仿真運(yùn)行。對某系統(tǒng)共作R次獨立重復(fù)仿真運(yùn)行(R≥2),Xi表示第i次運(yùn)行仿真值。將X1,X2,…,XR近似看成獨立同分布隨機(jī)變量的樣本觀察值,則均值和方差的點估計為:

圖4 填筑單元碾壓仿真流程圖Fig.4 Flow chart of simulation program for filling unit

故E(X)的100(1-α)%置信區(qū)間為:

式(12)中,tα/2(R-1)是自由度(R-1)的t分布上的α/2的百分位點。
若實際觀測值落入置信區(qū)間內(nèi),則認(rèn)為模型能較好地反映真實系統(tǒng)。
4 工程實例
糯扎渡堆石壩壩體為礫石土心墻堆石壩,壩頂長630.06 m,壩頂寬18 m,壩頂高程為 821.5 m,最大壩高為261.5 m,由心墻防滲料區(qū)、上下游反濾料區(qū)、上下游細(xì)堆石料區(qū)、上下游粗堆石料區(qū)和上下游護(hù)坡塊石料區(qū)組成。以其心墻某填筑單元為例,進(jìn)行碾壓仿真分析。
4.1 仿真參數(shù)
1)填筑單元形體信息。單元編號:01-14-0210-0699b,平行壩軸線邊長L=110 m,垂直壩軸線邊長B=44 m,高程EL=730.7 m。
2)碾壓機(jī)械配置信息。碾壓機(jī)型號:26T凸塊碾;碾壓機(jī)數(shù)量:5臺,碾輪寬度:2 m。
3)碾壓參數(shù)。采用進(jìn)退各一遍再錯距的碾壓方法,標(biāo)準(zhǔn)碾壓遍數(shù)n0=10遍,碾壓遍數(shù)合格率控制標(biāo)準(zhǔn)Q0=90%,碾壓機(jī)最大允許速度V0=3.0 km/h。
4)隨機(jī)變量。碾壓機(jī)行進(jìn)速度v~N(2.5 km/h、0.1),碾壓機(jī)行進(jìn)偏移角度θ(弧度)~N(0、0.1),錯距距離b~N(0.35 m、0.001),錯距時間T~N(25 s、4)。
5)時間信息。碾壓開始時間:2011-5-7 21:26:43,碾壓結(jié)束時間:2011-5-8 01:26:23,碾壓歷時:4 h,時間利用系數(shù):0.85。
4.2 填筑單元碾壓仿真分析
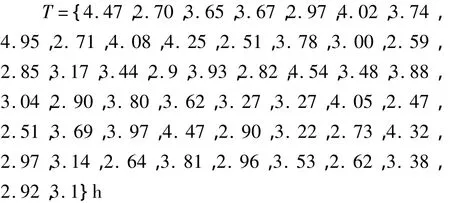
輸入仿真參數(shù),更新模型,對心墻區(qū)編號為01-14-0210-0699b的填筑單元的碾壓過程進(jìn)行施工仿真50次,碾壓歷時依次為:
對應(yīng)的每次仿真的碾壓遍數(shù)合格率依次為:

借助SPSS軟件對碾壓歷時仿真結(jié)果進(jìn)行K-S檢驗,如圖 5所示,由此可知:碾壓歷時T~N(3.39、0.623)的正態(tài)分布。

圖5 碾壓歷時K-S檢驗結(jié)果Fig.5 K -S test result of rolling time
4.3 仿真模型驗證分析
經(jīng)計算,=3.39 h,S2=0.388。文章取置信度為95%,則α=0.5,查t分布表后計算可得碾壓歷時的置信區(qū)間為(3.21 h、3.57 h)。考慮時間利用系數(shù)后,實際碾壓歷時T=3.4 h。實際工期落入此區(qū)間內(nèi),說明工期差異不明顯,仿真模型能較好地反映實際施工系統(tǒng)。
5 結(jié)語
壩面碾壓是高心墻堆石壩施工中最關(guān)鍵的工序,對其過程進(jìn)行全面的描述和系統(tǒng)的分析,對于高心墻堆石壩施工質(zhì)量和進(jìn)度控制具有重要意義。筆者等對高心墻堆石壩壩面碾壓過程進(jìn)行了分解-協(xié)調(diào)分析,通過綜合考慮各環(huán)節(jié)之間的施工邏輯關(guān)系和各種施工約束條件的影響機(jī)制,建立了高心墻堆石壩壩面碾壓施工數(shù)學(xué)模型,提出了高心墻堆石壩壩面碾壓施工仿真理論,構(gòu)建了以填筑單元為基本仿真單位的精細(xì)化仿真模型,并設(shè)計了仿真計算的流程。所提出的理論方法在糯扎渡心墻堆石壩工程中得到了實際應(yīng)用,對其填筑單元碾壓過程進(jìn)行了仿真分析,結(jié)果符合客觀實際,為指導(dǎo)高心墻堆石壩壩面碾壓施工提供了技術(shù)手段和理論指導(dǎo),具有很好的實際應(yīng)用價值。
[1]Zhong D H,Zhang P,Wu K X.Theory and practice of construction simulation for high rock-fill dam[J].Science in China Series E:Technological Science,2007,50(1):51-61.
[2]鐘登華,胡程順,張 靜.高土石壩施工計算機(jī)一體化仿真[J].天津大學(xué)學(xué)報,2004,37(10):872-877.
[3]鐘登華,張發(fā)瑜,李明超,等.面向?qū)ο蟮亩咽瘔问┕は到y(tǒng)仿真與優(yōu)化研究[J].水力發(fā)電,2003,33(3):87-89.
[4]李 翔,李玉珠.土石壩施工仿真模擬中壩面填筑系統(tǒng)的初步研究[J].水電站設(shè)計,2005,21(4):2-4.
[5]李家亮,李玉珠,李 翔.心墻堆石壩施工仿真系統(tǒng)研究及應(yīng)用[J].水力發(fā)電,2010,36(1):17-19.
[6]王仁超,吳桂蘭,李 喆.高土石壩施工系統(tǒng)仿真模型及其集成研究[J].水利水電技術(shù),2002,33(12):23-25.
[7]劉珊珊,周宜紅,劉 全,等.堆石壩施工的實時動態(tài)仿真系統(tǒng)研究[J].系統(tǒng)仿真學(xué)報,2004,16(11):2525-2528.
[8]Zhong D H,Cui B,Liu D H,et al.Theoretical research on construction quality real-time monitoring and system integration of core rockfill dam[J].Science in China Series E:Technological Science,2009,52(11):3406-3412.
[9]王維平,朱一凡,華雪倩,等.仿真模型有效性確認(rèn)與驗證[M].長沙:國防科技大學(xué)出版社,1998.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
建材發(fā)展導(dǎo)向(2022年10期)2022-07-28 03:04:36
建材發(fā)展導(dǎo)向(2021年18期)2021-11-05 09:19:50
建材發(fā)展導(dǎo)向(2021年9期)2021-07-16 07:11:36
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
中國房地產(chǎn)業(yè)(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
