用于多電機同步控制的角位移傳感器設計
2011-07-10 06:54:52奚小網
制造業自動化 2011年15期
奚小網,陸 榮,高 波
(1.無錫職業技術學院 機電技術學院,無錫 214121;2.中國船舶科學研究中心,無錫 214082)
0 引言
角度和角位移的測量在現代工業生產中廣泛應用,主要采用電阻式、電感式、電容式、光柵式、磁阻式等角度和角位移傳感器[1]。在多電機同步控制系統中角位移傳感器也有應用,但傳統的角位移測量儀,因結構等方面的缺陷,影響了其使用壽命和可靠性。利用導電塑料薄膜電位器作為敏感元件,設計了一種新型角位移傳感器,用于多電機同步運行控制,具有無接觸式、結構簡單、小巧輕便、線性好、控制精度高等特點,既提高了控制的可靠性和分辨率,又簡化了裝配工藝,降低了成本。
1 多電機同步控制原理
在造紙、紡織印染、軋鋼等生產設備中,由于具有多點傳動的要求,電動機的數量通常較多,對系統的調速控制也提出了更高的要求。在調速方式上,由于變頻調速具有可靠性高、使用維護方便等特點,因此這些設備一般采用變頻器傳動交流異步電動機的調速方式[2]。在工藝上,通常要求這些傳動電動機之間能夠實現同步運行(例如造紙、紡織印染設備)或按照一定的牽伸比(線速度比)運行(例如軋鋼機、化纖后處理設備)。如常用的印染后整理設備有顯色皂洗機、退煮漂聯合機、熱風烘燥機、絲光聯合機等,這些設備的傳動電機較多。工作時,布卷從設備進口進入,經過多電動機傳動后,在出口處再次形成布卷。顯然,為防止布匹在加工過程中跑偏、起皺并保證一定的張力,要求多個電動機保持同步運行,即實現多單元同步傳動。
圖1為三單元同步控制系統框圖。圖中VF1為主令電動機變頻器,VF2、VF3為軋車2以及軋車3的傳動電機變頻器。VF1的運行速度信號來自主控單元的主令給定,當主令信號確定后,整機的運行速度就確定了。
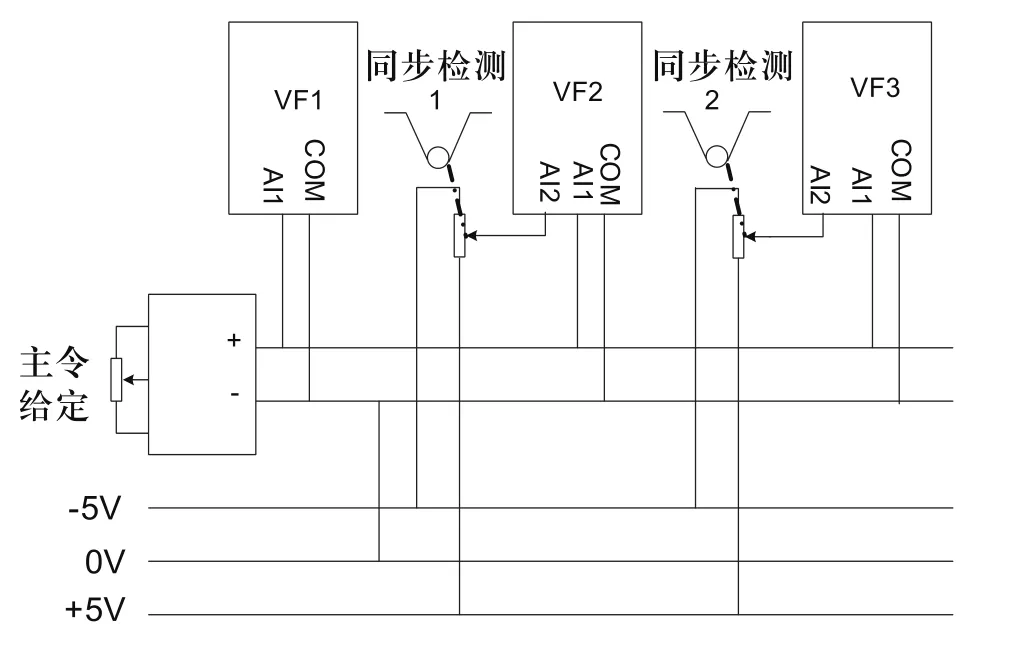
圖1 三單元同步控制系統示意圖
本系統中,為保證軋車2、軋車3與軋車1的同步運行,變頻器VF2、VF3 的速度由主令信號和同步檢測裝置共同給定。由圖1可見,同步檢測裝置中的電位器接±5V直流電源,當電位器處于中間位置時,給定信號為0V。同步檢測信號輸入變頻器輔助模擬量輸入端后,可通過設定變頻器內部參數得到如下速度控制信號:

式中,k1、k2取值范圍為0~1。
運行中,當軋車2速度偏大時,同步檢測電位器觸點上移,變頻器輔助輸入端的信號為負,速度控制信號VF變小,使軋車2速度下降,最終實現與VF1同步,即實現多單元同步運行。
傳統設備采用直流電機加變速箱傳動,單元間采用擺式或棍式松緊架同步裝置或自整角機調節電機的轉速,或采用張力傳感器構成恒張力控制系統,這些措施可靠性較差,控制操作管理與使用維護成本高。有人采用光電編碼器或光柵等數字轉速傳感器和數字控制器實現的同步控制方案,也有用計算機和網絡加開關量接口模塊控制的同步方案,但這類方案又有因所需傳感器或接口模塊數量多,致使設備成本大大增加和對控制要求非常高的缺點[3]。采用交流變頻調速取代直流調速,技術水平有了很大的提高,新型非接觸式角位移傳感器的使用,可有效提高長期可靠性和達到很高的分辨率。
2 新型角位移傳感器設計
2.1 角位移傳感器的結構
新型角位移傳感器采用非接觸式設計,其結構示意圖如圖2所示。敏感元件采用導電塑料電位器WDD35D-4。選擇電位器標準阻值5kΩ、阻值公差±15%、獨立線性精度±0.5%。電位器理論電氣轉角:345°±2°;分辨率:無限;功率:2W(70℃);電阻溫度系數(ppm/℃):<±400;工作溫度范圍:-55℃~125℃;機械轉角:360°(連續)。電位器固定于傳感器外殼,電位器線圈隨傳感器外殼一起轉動,其滑動轉軸與質量塊固定,在重力作用下保持豎直向下,因而可將傳感器轉角的變化轉換成電阻的變化。
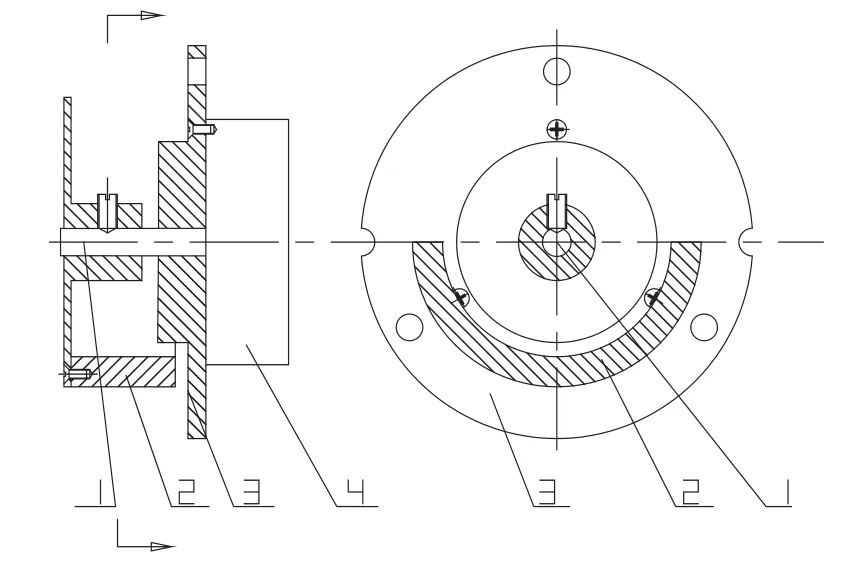
圖2 傳感器結構示意圖
新型角位移傳感器使用時直接安裝在松緊架傳感器安裝軸端,如圖3所示,這樣可有效避免傳感器承受的扭矩。安裝軸檢測浮動輥的位置變化,當右側的電機運行速度相對變快時,浮動輥升高,角位移傳感器檢測的角度正向變大,當浮動輥升高到超出最高值的范圍時,角位移傳感器輸出上越位信號。相反,當左邊的電機運行速度相應變快時,浮動輥下降,角位移檢測的角度反向變大,當浮動輥下降到超出最低值的范圍時,角位移傳感器輸出下限位信號。

圖3 角位移傳感器安裝示意圖
2.2 角位移傳感器電路設計要求
工作類型:該角位移傳感器可根據同步控制的要求,設定為標準型和同步型兩種工作類型。標準型角位移傳感器無同步控制功能,工作時變頻器需外接同步器;同步型角位移傳感器有專門的同步信號輸入端,可獨立實現同步控制。
測量范圍及輸出電壓:根據實際應用的需求,該角位移傳感器的出廠整定范圍為±45°,標準型輸出電壓2.5~7.5V,同步型輸出電壓為同步信號±1V。
越位輸出信號:傳感器具有上限越位觸點和下限越位觸點,在正常工作范圍內,上限越位觸點和下限越位觸點均閉合,上限越位時對應的上限越位觸點斷開,下限越位時則對應的下限越位觸點斷開。
同步型傳感器的上下限位開關串聯輸出,作為一個開關使用。正常時,開關閉合;越位狀態下,開關斷開。
2.3 檢測與轉換電路組成
根據設計要求,新型角位移傳感器完成信號檢測與轉換的電路由正常輸出電路、上限位輸出電路、下限位輸出電路以及電源電路四部分組成,敏感元件為導電塑料電位器RW0。其電路組成如圖4所示。
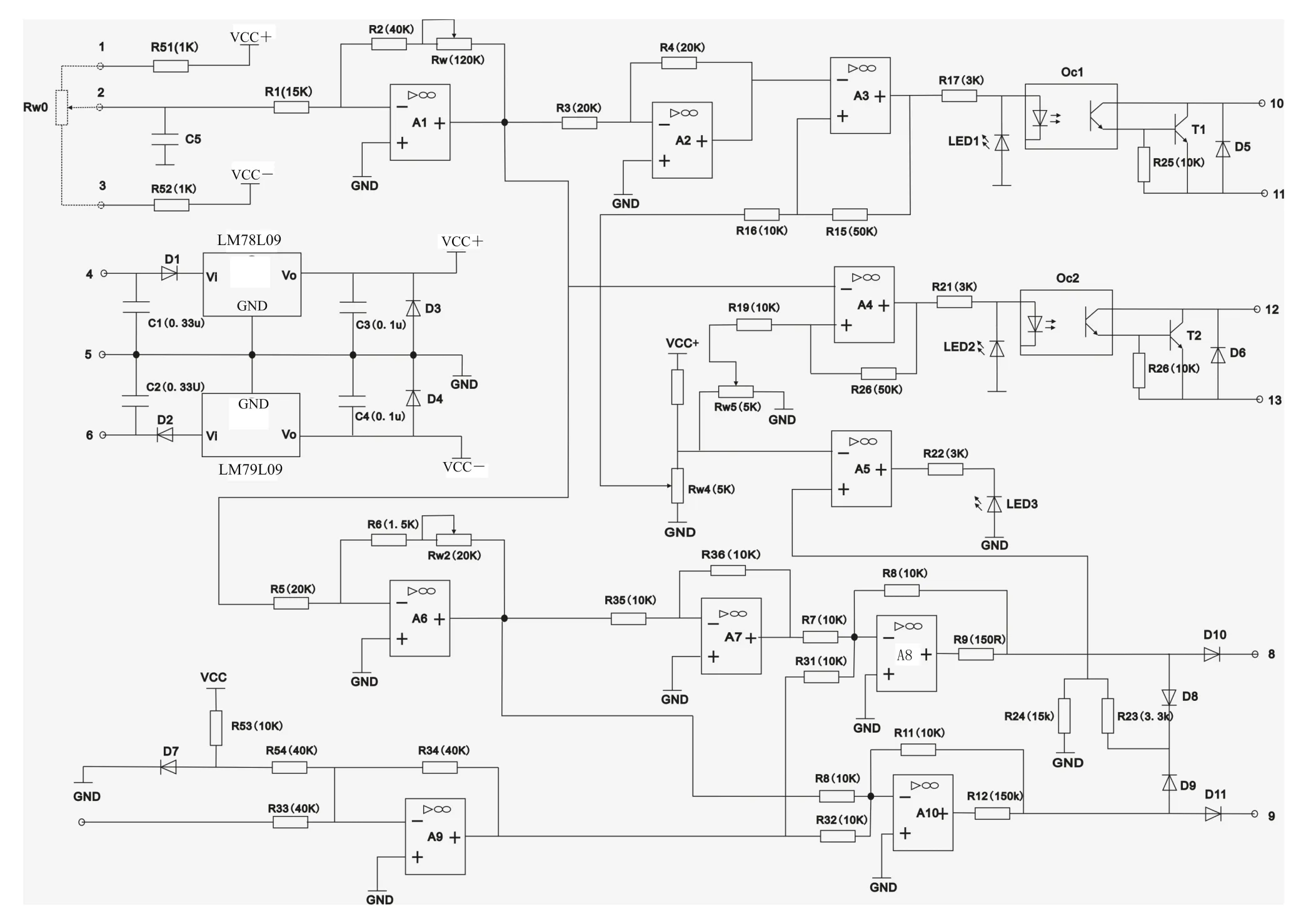
圖4 角位移傳感器檢測與轉換電路
電源電路:采用三端集成穩壓器LM78L09以及LM79L09產生所需電壓。三端集成穩壓器的輸出電流為100mA,可滿足負載電路的使用要求。二極管D1和D2用于防止外部電源極性接反,D3和D4為集成穩壓器的保護二極管。輸入端接電容C1和C2用于消除串入電路的高頻干擾;輸出端接電容C3和C4可消除電路中的有害自激振蕩,改善電源的瞬態響應。
正負動作信號輸出電路:根據控制要求,當檢測角度在±45°范圍內變化時,標準型傳感器應輸出2.5~7.5V電壓,同步型傳感器輸出同步電壓±1V。在電路中首先通過反相輸入放大電路A1將敏感元件輸出電壓進行放大,再通過反向器A8輸出正動作信號;反相輸入放大電路A1直接輸出負動作信號。為滿足同步控制要求,電路中增加反相加法電路將同步信號與檢測信號疊加,同時增加反相放大電路A6將經過A1放大后的檢測信號進行調整,以滿足同步型傳感器輸出電壓等于同步信號±1V的要求。
上限位輸出電路:上限位輸出電路由放大電路、遲滯比較電路以及光電耦合輸出電路組成。放大電路由反相比例放大電路A1以及反相器A2構成,用于對輸入電壓進行放大。由A3等組成遲滯電壓比較電路,避免上限越位輸出電壓在上限位置來回跳變。采用光電耦合電路作為輸出電路可割斷信號處理電路與輸出電路之間電的聯系,電路之間的信號通過光線傳輸,使前端與負載完全隔離,增加安全性,減小電路干擾,簡化電路設計。當U11<UTH時,即輸入未達上限位時,光電耦合器發光二極管發光,光敏晶體管導通,晶體管T1導通,端子10與端子11接通,相當于開關閉合;當U11>UTH時,即輸入超過上限位時,光電耦合器截止,晶體管T1截止,端子10與端子11斷開,相當于開關斷開。
下限位輸出電路:根據控制要求,當傳感器轉角達到基準位置-45°時產生下限越位信號。當電位器RW0滑動觸點向下滑動時,經過反相放大電路A1放大后輸出電壓UO1與遲滯電壓比較電路相應的閾值電壓UF2比較:當UO1大于UF2時,輸出電壓為低電平,下限越位指示發光二極管發光指示越位輸出,光電耦合器件截止,晶體管T2截止,端子12與端子13斷開,相當于開關斷開;當UO1小于UF2時,輸出電壓U22為高電平,光電耦合器件導通,晶體管T2導通,端子12與端子13導通,相當于開關閉合。
2.4 實驗結果
調試后,取電位器RW0滑動觸點位置設定為27%時對應浮動輥的基準位置,即敏感元件+90°位置。在45°~135°范圍內進行了測量,得到正動作輸出電壓在2.46V到7.47V之間變化,其與被測角位移之間成線性關系,如圖5所示。
3 結束語
運用導電塑料電位器及其滑動轉軸與質量塊固定的結構制成的新型傳感器,固定于傳動輥上,電位器線圈隨傳感器外殼一起轉動,將傳感器轉角的變化轉換成電阻的變化而改變輸出電壓,通過變頻器使多電機同步運行。該傳感器具有無接觸式、結構簡單、小巧輕便、線性好、控制精度高等特點。
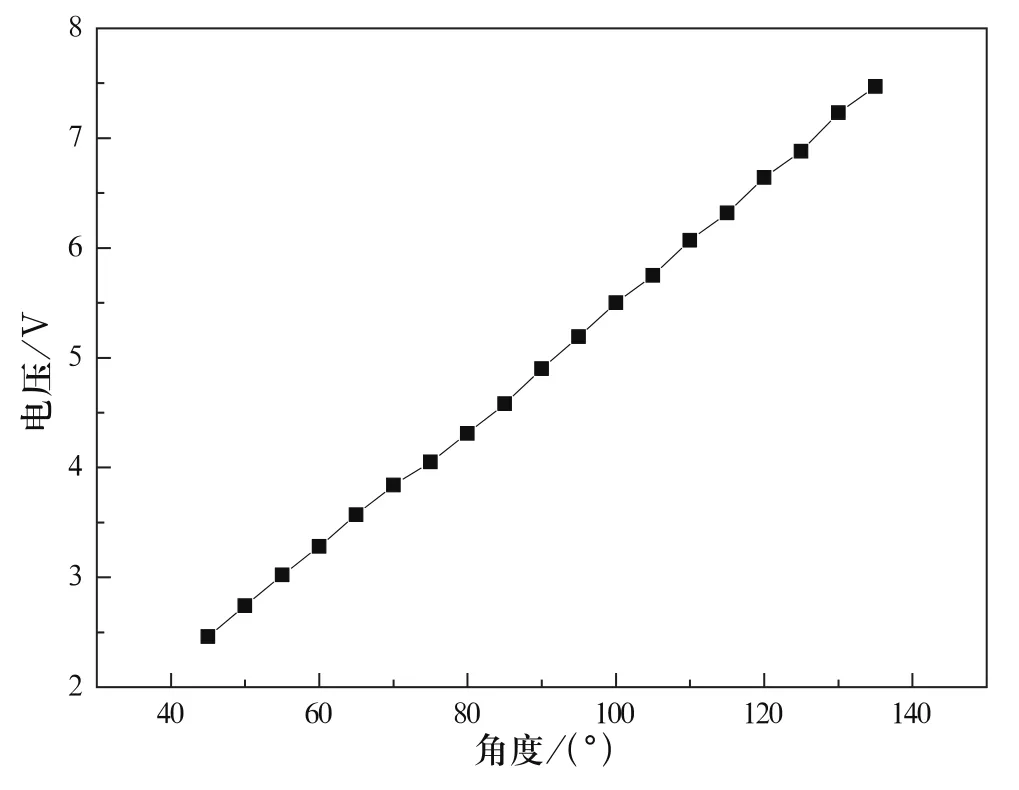
圖5 輸出電壓與角位移的關系曲線
[1] 梁長垠,晏凱.基于單片機的電容式角位移測量系統[J].傳感器與微系統,2006,25(8):52-54.
[2] 黃麟.交流調速系統及應用[M].大連理工大學出版社,2009:181-183.
[3] 潘湘高,李曉峰.紡織印染機械多電機群變頻調速同步DCS[J].紡織學報,2007,28(4):116-120.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
防爆電機(2020年3期)2020-11-06 09:07:42
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
測控技術(2018年5期)2018-12-09 09:04:50
電子制作(2017年7期)2017-06-05 09:36:13
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
自動化博覽(2014年12期)2014-02-28 22:34:39
河南科技(2014年18期)2014-02-27 14:14:58
