基于遞推最小二乘法的永磁同步電動機參數辨識
2011-07-20 03:59:00張洪東
微特電機 2011年11期
張洪東,李 宏,鄭 勇
(西北工業大學,陜西西安710072)
0 引 言
永磁同步電動機具有結構簡單、體積小、效率高、轉矩電流比高、轉動慣量低,控制性能好等優點,廣泛應用于交流控制系統中[1]。但是在實際的控制中當受到負載變化、溫度升高以及老化等因素影響時,永磁同步電動機的繞組電阻、電感和轉子磁鏈等參數會發生變化,導致實際控制效果變差,嚴重時可導致系統震蕩。為了達到更好的控制效果,參數的實時辨識是非常必需的。目前常用的電機參數辨識方法有最小二乘法、卡爾曼濾波法、模型參考自適應法、遺傳算法以及神經網絡模糊控制法。最小二乘法具有算法簡單、易于理解、易于實現等優點,因此被廣泛應用于系統辨識中。
本文采用遞推最小二乘法實現參數的自適應辨識。通過對永磁同步電動機穩態數學模型的推導,將電機的定子電壓等可觀測的量作為輸入輸出量辨識出電機的定子電阻Rs和d、q軸電樞電感Ld、Lq。
1 最小二乘法的原理及設計
最小二乘法是工程中常用的辨識方法[2],最小二乘法理論是高斯在解決天體運動軌道問題時提出的,它包括最小二乘法、增廣最小二乘法、廣義最小二乘法、輔助變量法和相關二步法等。圖1是最小二乘法的表達形式。
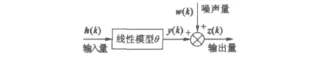
圖1 最小二乘法的表達形式
圖中,h(k)為輸入量,y(k)是輸出量,w(k)為測量噪聲,z(k)為輸出測量值,e(k)是均值為零的隨機噪聲,θ是未知模型參數,記:

模型的輸出可表示:

利用數據系列{z(k)}和{h(k)},極小化下列準則函數:


導出下列遞推公式:

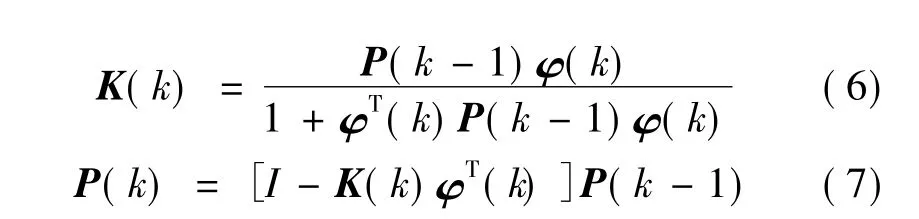
式中:α為充分大的正實數(104~106),ε是零向量。
2 辨識模型的建立
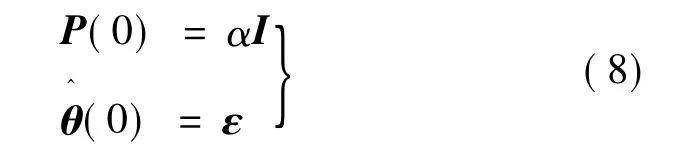
永磁同步電動機是個非線性、強耦合的多變量系統。在控制時,要實現對象的近似解耦,采用轉子磁鏈定向同步旋轉坐標系,可以消除定子繞組與轉子繞組之間的旋轉耦合,方便分析永磁同步電動機穩態和動態性能。在d、q旋轉坐標系下的電壓方程:
其中:

式中:iq、id和 uq、ud分別為 d、q 的電流和電壓;Rs、Lq、Ld分別為定子繞組的電阻和 d、q軸的電感;ψf、ψq、ψd分別為永磁體勵磁磁鏈和定子在d、q磁鏈的分量;ωe是轉子的電角速度。采用最小二乘參數估計的遞推算法實現參數的自適應辨識。將式(9)改寫成最小二乘法的表達形式:

由于逆變器的開關周期選用的是10 kHz,取Ts=1×10-4s。在狀態變量處理過程中引入了三階巴特沃思濾波器截止頻率800 Hz進行修正。
3 仿真結果及分析
在 Matlab 7.0的 Simulink環境下搭建基于SVPWM的雙閉環永磁同步電動機參數辨識系統的仿真模型。根據模塊化仿真建模的思想,如圖2所示,可以將整個永磁同步電動機控制系統分割為各個功能獨立的子模塊,包括:永磁同步電動機模塊,電機矢量控制(SVPWM)模塊,最小二乘法參數辨識模塊。通過這些功能模塊的有機整合,在Simulink中仿真實現電機的定子電阻Rs和d、q軸電樞電感Ld、Lq在線辨識。
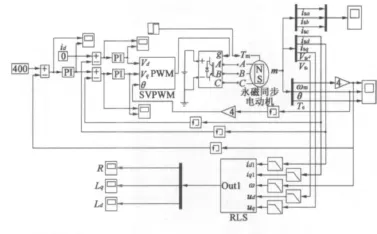
圖2 基于SVPWM的雙閉環永磁同步電動機參數辨識系統的仿真模型
仿真系統中永磁同步電動機參數如表1所示。

表1 永磁同步電機仿真參數
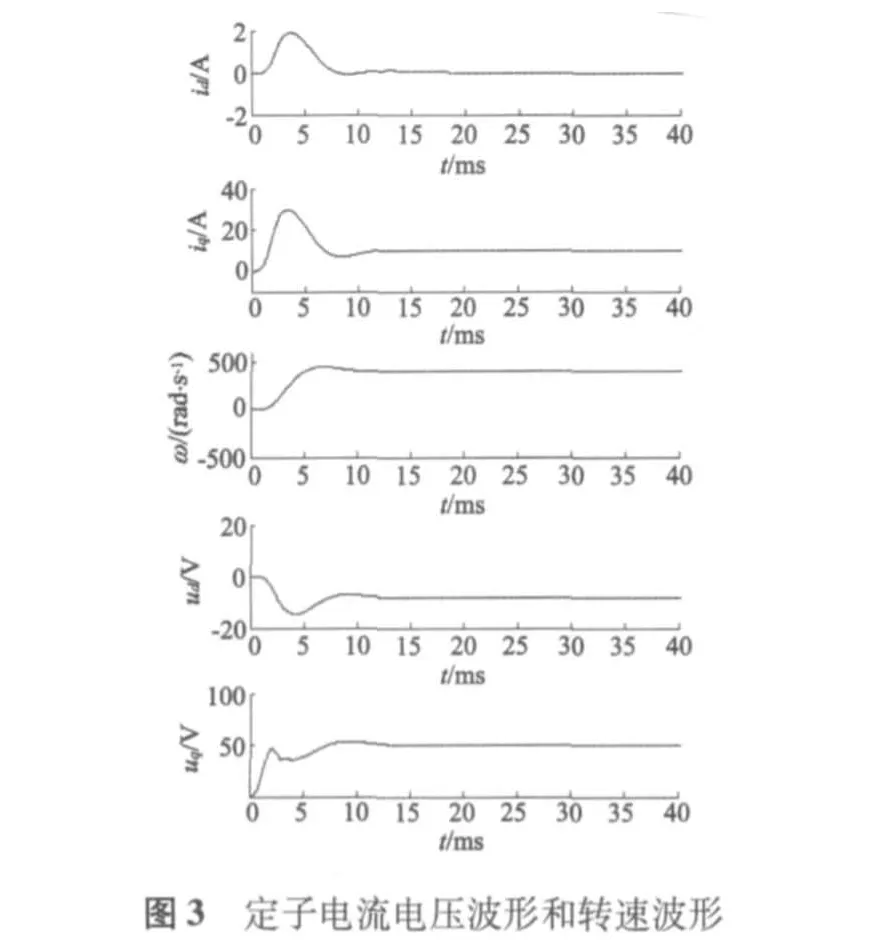
最小二乘法參數辨識模塊由于需要大量數據進行矩陣運算,編寫函數S-function作為一個模塊嵌入整個永磁同步電動機控制系統仿真環境中,將電機模型輸出的 id、iq、ω、ud、uq5 組數據作為函數的輸入。仿真過程中電機的初始電磁參數都為零,仿真最大步長設置為 100 μs,采樣時間 Ts=1 ×10-4s,利用遞推最小二乘算法修正前一時刻辨識出的電機參數,獲得新的電機辨識參數。如圖3所示。
圖4是永磁同步電動機控制過程中電阻和電感的辨識的仿真結果。實線表示應用遞推算法的估計值,虛線表示實際電機的電磁參數。可以看出永磁同步電動機的定子電阻Rs及d、q軸電樞電感Ld、Lq從初始值零單調向電機相應參數的實際值進行收斂,并無限地接近相應電機參數的實際值。

仿真結果表明,采用遞推最小二乘法的參數辨識算法能夠在線準確辨識出電機的電磁參數,能夠很好地跟隨電機參數的變化,具有快速的收斂性和良好辨識精度。
4 結 語
在永磁同步電動機的矢量控制系統中,為了提高控制系統的控制精度,改善電機由于實際運行中受到負載變化、溫度升高等因素引起電機控制失調,因此在電機控制系統中往往會加入電機參數辨識。本文介紹了基于遞推最小二乘法辨識的永磁同步電動機電機參數辨識原理,在Simulink環境下進行仿真以驗證該方法的有效性。從仿真結果來看,效果比較理想。由于遞推最小二乘算法實現比較簡單,易于實現因此該方法對于實現電機參數的高速在線辨識,具有較大實際應用價值。
[1] 唐任遠.現代永磁電機理論與設計[M].北京:機械工業出版社,1997:3-6.
[2] 龐中華,崔紅.系統辨識與自適應控制MATLAB仿真[M].北京航空航天大學出版社,2009:25-35.
[3] 侯媛彬,汪梅,王立琦.系統辨識及其 MATLAB仿真[M].2004:51-78.
[4] 齊榮,林輝,陳明.單斬調制方式對無刷直流電動機換相轉矩脈動的影響[J].微特電機,2006(8):11-14.
[5] Joong H S,Jck C.Commutation Torque Ripple Reduction in Brushless DC Motor Drive Using a Single DC Current Sensor[J].IEEE Transon Power Electionics,2004,19(2):312 -319.
[6] 趙濤,姜衛東.利用Pspice仿真分析PWM控制電路[J].安徽大學學報,2005,29(5):49-52.
