基于仿真的長(zhǎng)距離引水隧洞施工全過(guò)程進(jìn)度實(shí)時(shí)控制與可視化分析研究
2011-08-17 00:50:10胡連興佟大威
中國(guó)工程科學(xué) 2011年12期
胡連興,佟大威,焦 凱
(1.天津大學(xué)水利工程仿真與安全國(guó)家重點(diǎn)實(shí)驗(yàn)室,天津 300072;2.二灘水電開(kāi)發(fā)有限責(zé)任公司,成都 610021)
1 前言
長(zhǎng)距離引水隧洞常具有埋深大、洞線長(zhǎng)、洞徑大和工程地質(zhì)條件復(fù)雜等特點(diǎn)。傳統(tǒng)施工進(jìn)度控制一般是依據(jù)開(kāi)工前所制定的施工組織設(shè)計(jì)來(lái)進(jìn)行的,而在實(shí)際施工過(guò)程中,內(nèi)外環(huán)境和各種約束條件可能發(fā)生變化,使原定的施工進(jìn)度計(jì)劃與實(shí)際施工進(jìn)程不可避免地產(chǎn)生偏差,這種偏差如不及時(shí)糾正,將會(huì)越來(lái)越大,以致原計(jì)劃進(jìn)度起不到指導(dǎo)實(shí)際施工的作用。文章利用計(jì)算機(jī)仿真技術(shù)、控制論思想和虛擬現(xiàn)實(shí)技術(shù),提出了基于仿真的長(zhǎng)距離引水隧洞施工全過(guò)程進(jìn)度實(shí)時(shí)控制與可視化分析方法,對(duì)實(shí)時(shí)控制施工進(jìn)度提供可行性研究和科學(xué)依據(jù),確保項(xiàng)目管理人員準(zhǔn)確、迅速地進(jìn)行施工項(xiàng)目管理。
2 基于仿真的長(zhǎng)距離引水隧洞施工全過(guò)程進(jìn)度實(shí)時(shí)控制原理
2.1 施工全過(guò)程仿真原理
長(zhǎng)距離引水隧洞施工全過(guò)程仿真技術(shù)融合網(wǎng)絡(luò)計(jì)劃分析和數(shù)值仿真技術(shù)于一體,利用CPM(critical path method,關(guān)鍵路徑法)網(wǎng)絡(luò)計(jì)劃技術(shù)和循環(huán)網(wǎng)絡(luò)仿真技術(shù)[1](cycle operation network,CYCLONE),并結(jié)合優(yōu)化技術(shù),對(duì)整個(gè)施工過(guò)程進(jìn)行仿真計(jì)算和優(yōu)化分析。
長(zhǎng)距離引水隧洞仿真采用系統(tǒng)仿真的辦法。系統(tǒng)分為連續(xù)性系統(tǒng)和離散系統(tǒng)[2]。前者是指系統(tǒng)狀態(tài)隨時(shí)間呈連續(xù)性變化,后者是指系統(tǒng)狀態(tài)僅在有限的時(shí)間點(diǎn)發(fā)生跳躍性變化。對(duì)于工程施工系統(tǒng),研究施工過(guò)程的變化與發(fā)展時(shí),使用離散系統(tǒng)進(jìn)行仿真已經(jīng)足夠了[3]。
離散系統(tǒng)仿真是用“仿真鐘”[4]來(lái)體現(xiàn)“模擬時(shí)間”的運(yùn)行軌跡。仿真鐘采用時(shí)間步長(zhǎng)法推進(jìn),以工序準(zhǔn)備施工狀態(tài)作為初始狀態(tài),以開(kāi)始施工的時(shí)刻作為本地仿真鐘的零點(diǎn),從該點(diǎn)開(kāi)始,向前推進(jìn)一個(gè)時(shí)間步長(zhǎng)Δt,檢測(cè)是否有滿足條件的活動(dòng)發(fā)生。如果有活動(dòng)發(fā)生,則被認(rèn)為發(fā)生在Δt的終止處,相應(yīng)地改變系統(tǒng)的狀態(tài),重復(fù)上述做法直到該工序結(jié)束,并把本地仿真鐘的狀態(tài)及資源利用率等信息一同返回給當(dāng)前工序,作為當(dāng)前工序的仿真結(jié)果保存起來(lái)。依此辦法,按時(shí)間順序進(jìn)行推進(jìn),對(duì)所有的仿真工序進(jìn)行仿真,直到整個(gè)工程結(jié)束。長(zhǎng)距離引水隧洞施工全過(guò)程仿真流程如圖1所示。
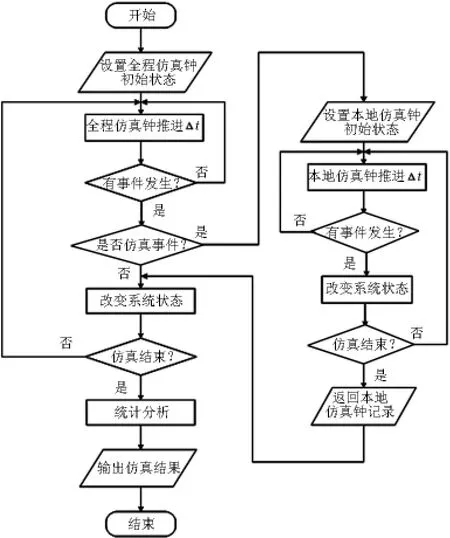
圖1 長(zhǎng)距離引水隧洞施工全過(guò)程仿真流程Fig.1 Flow chart of long diversion tunnel whole construction process simulation
2.2 長(zhǎng)距離引水隧洞施工系統(tǒng)仿真建模
長(zhǎng)距離引水隧洞施工是一個(gè)動(dòng)態(tài)過(guò)程,為了降低建模的復(fù)雜性,提高建模的效率,文章采用層次化、模型化建模的思想[5],根據(jù)系統(tǒng)協(xié)調(diào)原理,將長(zhǎng)距離引水隧洞施工仿真模型劃分成兩個(gè)層次:控制層模型和實(shí)施層模型。控制層模型采用CPM網(wǎng)絡(luò)計(jì)劃技術(shù)建立,稱為CPM網(wǎng)絡(luò)層模型;實(shí)施層模型采用循環(huán)網(wǎng)絡(luò)仿真技術(shù),稱為CYCLONE層模型。
2.2.1 CPM網(wǎng)絡(luò)層仿真模型的建立
控制層模型對(duì)應(yīng)著工程控制的基本單位——工序。工序作為一個(gè)基本控制單元,采用的施工方法、機(jī)械設(shè)備配置和人員等基本固定。長(zhǎng)距離引水隧洞施工控制層CPM網(wǎng)絡(luò)模型如圖2所示。
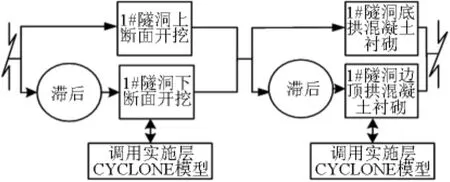
圖2 長(zhǎng)距離引水隧洞施工控制層CPM網(wǎng)絡(luò)模型Fig.2 CPM network model of long diversion tunnel construction control layer
2.2.2 CYCLONE層仿真模型的建立
實(shí)施層模型反映控制層工序的施工工藝。以上斷面開(kāi)挖為例,長(zhǎng)距離引水隧洞上斷面開(kāi)挖施工過(guò)程包括鉆孔、裝藥、爆破、通風(fēng)排煙、安全檢查、支護(hù)、出渣等工藝,每個(gè)工藝構(gòu)成實(shí)施層的一個(gè)模型單元。實(shí)施過(guò)程是循環(huán)往復(fù)的,采用循環(huán)網(wǎng)絡(luò)(CYCLONE)技術(shù)對(duì)其進(jìn)行建模分析。針對(duì)不同的施工工序的施工特點(diǎn),可以建立不同施工工序的循環(huán)網(wǎng)絡(luò)仿真模型,包括開(kāi)挖工序、襯砌工序和灌漿工序。圖3所示為開(kāi)挖工序施工CYCLONE層仿真模型。
2.2.3 仿真模型參數(shù)的分類與確定方法
仿真模型參數(shù)是仿真系統(tǒng)的重要組成部分,也是模型方案設(shè)計(jì)的數(shù)據(jù)基礎(chǔ),參數(shù)的準(zhǔn)確性與有效性直接影響到模型有效性評(píng)價(jià)及仿真結(jié)果的可信性與可用性。長(zhǎng)距離引水隧洞施工系統(tǒng)仿真模型參數(shù)按照其性質(zhì)和來(lái)源方式可分為確定型模型參數(shù)、隨機(jī)型模型參數(shù)[6]。
1)確定型模型參數(shù)指那些在系統(tǒng)運(yùn)行過(guò)程中不發(fā)生改變,且能夠客觀地反映原型系統(tǒng)運(yùn)行特征屬性的參數(shù),如隧洞的斷面尺寸、出渣通道以及機(jī)械設(shè)備的有關(guān)性能指標(biāo)等。
2)隨機(jī)型模型參數(shù)指那些在仿真運(yùn)行過(guò)程中是不確定的,但可以通過(guò)統(tǒng)計(jì)分析方法或隨機(jī)理論方法獲得的模型參數(shù),如裝渣、卸渣時(shí)間等。文章研究了9種不同的隨機(jī)分布類型,其名稱及有關(guān)參數(shù)如表1所示。
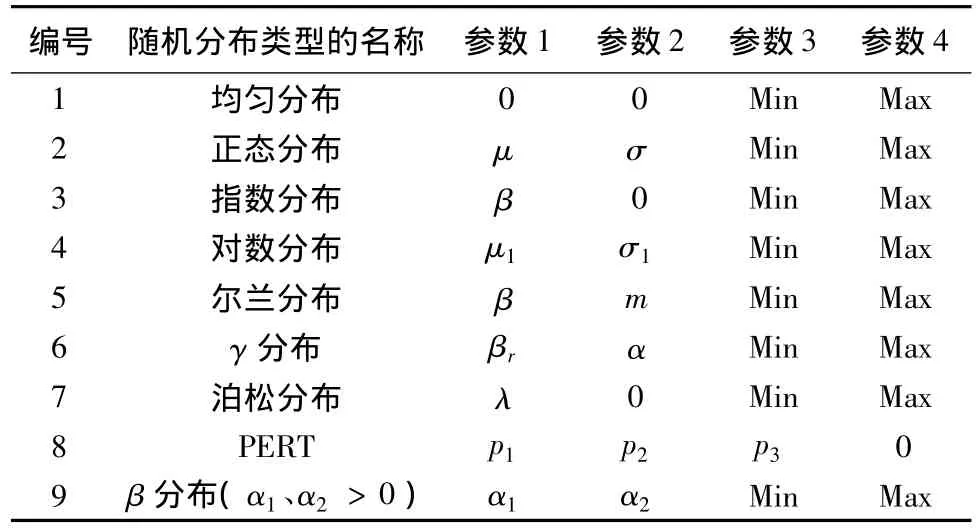
表1 隨機(jī)分布類型的名稱及其參數(shù)Table 1 Designation and parameters of the random distribution
2.3 基于仿真的實(shí)時(shí)進(jìn)度控制方法分析
2.3.1 進(jìn)度偏差比較分析方法
長(zhǎng)距離引水隧洞實(shí)際進(jìn)度信息一般比較散亂,沒(méi)有一個(gè)整體的概念,如果把這些信息反映到圖表上,就可以直觀、全面地了解實(shí)際進(jìn)度信息。文章采用進(jìn)度狀態(tài)向量和進(jìn)度動(dòng)態(tài)曲線[7,8](前鋒線法)兩種方法來(lái)描述實(shí)際進(jìn)度與計(jì)劃進(jìn)度之間的偏差。
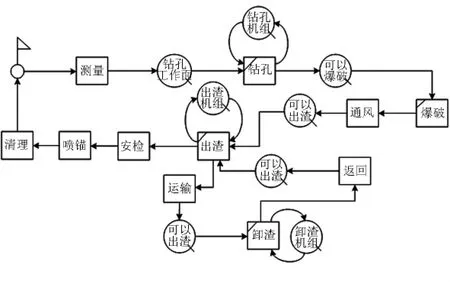
圖3 開(kāi)挖工序施工實(shí)施層CYCLONE模型Fig.3 CYCLONE model of drill-blasting process construction implementation layer
1)進(jìn)度狀態(tài)向量。在進(jìn)度控制中,任意時(shí)刻的工作狀態(tài)有三種可能,一是未開(kāi)始,二是已完成,三是正在進(jìn)行。
設(shè)狀態(tài)變量mit表示在t時(shí)刻第i項(xiàng)工作ai的狀態(tài),則有:

假設(shè)工程共有n個(gè)工序,則在t時(shí)刻所有工作狀態(tài)的集合構(gòu)成了一個(gè)狀態(tài)向量mt:
該向量中的元素只由-1、0、1構(gòu)成,mt為實(shí)際進(jìn)度狀態(tài),即在t時(shí)刻工程中各項(xiàng)工作實(shí)際達(dá)到的進(jìn)度狀態(tài)。為計(jì)劃進(jìn)度狀態(tài),即在t時(shí)刻工程中各項(xiàng)工作計(jì)劃達(dá)到的進(jìn)度狀態(tài)。dt為t時(shí)刻實(shí)際進(jìn)度狀態(tài)與計(jì)劃進(jìn)度狀態(tài)之差異,設(shè):則dt中各元素有5種可能的值:
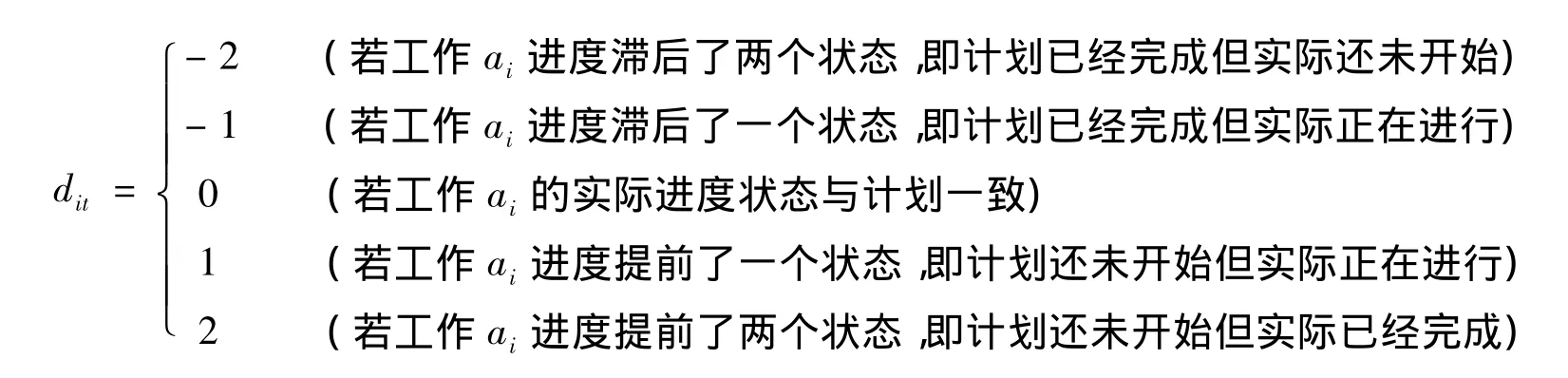
從工程開(kāi)始到當(dāng)前時(shí)刻的所有檢查點(diǎn)的狀態(tài)向量集合,可以構(gòu)成進(jìn)度狀態(tài)矩陣和偏差矩陣。其中計(jì)劃進(jìn)度狀態(tài)矩陣為,實(shí)際進(jìn)度矩陣為,而進(jìn)度偏差矩陣上述矩陣反映了施工進(jìn)度計(jì)劃的執(zhí)行過(guò)程,對(duì)于工程計(jì)劃執(zhí)行情況的評(píng)價(jià)和施工狀態(tài)的預(yù)測(cè)提供了科學(xué)依據(jù)。
2)進(jìn)度動(dòng)態(tài)曲線(前鋒線法)。前鋒線比較法是通過(guò)繪制檢查時(shí)刻工程實(shí)際進(jìn)度前鋒線進(jìn)行實(shí)際進(jìn)度與計(jì)劃進(jìn)度的偏差比較。所謂前鋒線是指在原時(shí)標(biāo)網(wǎng)絡(luò)計(jì)劃上,從檢查時(shí)刻的時(shí)標(biāo)點(diǎn)出發(fā),依次將各項(xiàng)工作實(shí)際進(jìn)展位置點(diǎn)連接而成的折線,如圖4所示。
2.3.2 基于仿真的施工實(shí)時(shí)進(jìn)度控制與預(yù)測(cè)方法
基于仿真的施工進(jìn)度實(shí)時(shí)預(yù)測(cè)[9]是指根據(jù)任意時(shí)刻的實(shí)際施工情況,運(yùn)用施工過(guò)程循環(huán)網(wǎng)絡(luò)仿真技術(shù),對(duì)剩余的工程施工過(guò)程進(jìn)行仿真,確定剩余工程的工期以及各工序的時(shí)間參數(shù),預(yù)測(cè)將來(lái)工程的施工進(jìn)度。基于仿真的施工進(jìn)度實(shí)時(shí)控制分析流程如圖5所示。
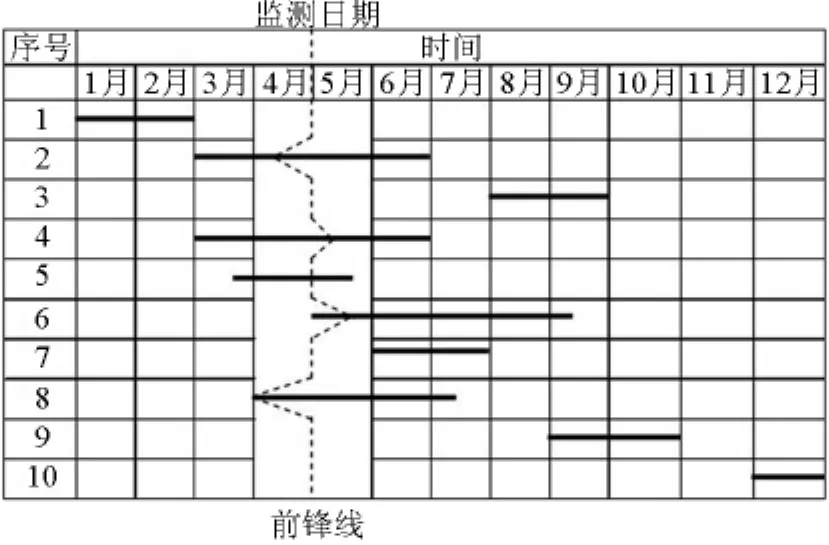
圖4 前鋒線比較法示意圖Fig.4 Schematic diagram of the front line
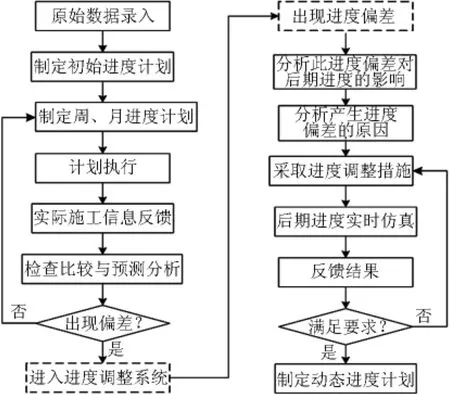
圖5 基于仿真的施工進(jìn)度實(shí)時(shí)控制分析流程圖Fig.5 Real-time control flow chart of the construction schedule based on simulation
3 長(zhǎng)距離引水隧洞施工實(shí)時(shí)進(jìn)度可視化仿真方法
3.1 基于VR-Platform的實(shí)時(shí)進(jìn)度可視化仿真機(jī)制
長(zhǎng)距離引水隧洞施工實(shí)時(shí)進(jìn)度可視化仿真采用VC++作為仿真計(jì)算平臺(tái),VR-Platform SDK作為三維圖形引擎,通過(guò)仿真計(jì)算與SDK的實(shí)時(shí)交互來(lái)實(shí)現(xiàn)實(shí)時(shí)交互式仿真[10]。長(zhǎng)距離引水隧洞施工進(jìn)度實(shí)時(shí)交互式仿真與控制系統(tǒng)如圖6所示,它由仿真計(jì)算數(shù)據(jù)、三維場(chǎng)景數(shù)據(jù)庫(kù)、系統(tǒng)仿真程序和實(shí)時(shí)交互程序等幾個(gè)部分組成。
3.2 施工進(jìn)度實(shí)時(shí)交互式仿真系統(tǒng)的運(yùn)行控制
為了實(shí)現(xiàn)對(duì)實(shí)時(shí)仿真系統(tǒng)的運(yùn)行過(guò)程進(jìn)行交互控制,就要使用戶不僅可以對(duì)真實(shí)施工場(chǎng)景進(jìn)行觀察和參與,還能對(duì)仿真系統(tǒng)的狀態(tài)進(jìn)行控制[11]。在實(shí)時(shí)交互式仿真系統(tǒng)中,用戶可以實(shí)時(shí)地參與仿真系統(tǒng)的運(yùn)行,身臨其境地體會(huì)系統(tǒng)狀態(tài)的變化過(guò)程,并做出交互控制。真實(shí)場(chǎng)景下的施工系統(tǒng)實(shí)時(shí)交互式仿真與控制原理如圖7所示。
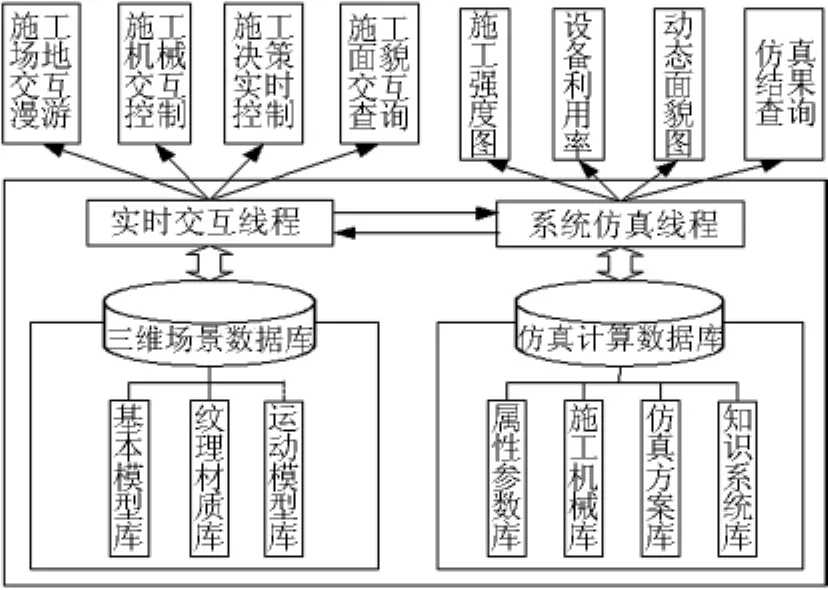
圖6 長(zhǎng)距離引水隧洞施工進(jìn)度實(shí)時(shí)交互式仿真與控制系統(tǒng)框架Fig.6 Frame diagram of the construction schedule interactive simulation
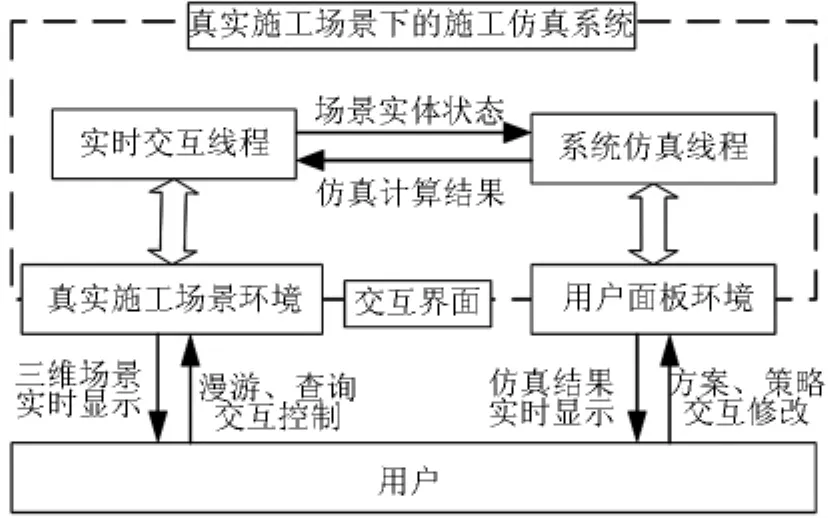
圖7 真實(shí)場(chǎng)景下的施工系統(tǒng)實(shí)時(shí)交互式仿真與控制原理Fig.7 Interactive simulation and control principle of the construction system based on real scene
4 工程實(shí)例分析
4.1 工程概況
某電站長(zhǎng)距離引水隧洞群位于我國(guó)西南地區(qū),該工程引水隧洞群的單洞長(zhǎng)約16.67 km,開(kāi)挖洞徑為12.4 ~13.8 m,最大埋深達(dá) 2525 m。長(zhǎng)距離引水隧洞群工序工作量大,相互間影響巨大,加之復(fù)雜的地質(zhì)條件,增加了執(zhí)行施工進(jìn)度的風(fēng)險(xiǎn)。文章以1#引水隧洞為例,對(duì)1#隧洞進(jìn)行實(shí)時(shí)控制與可視化分析。通過(guò)現(xiàn)場(chǎng)分析,至2011年3月,施工進(jìn)度嚴(yán)重滯后,按照原施工進(jìn)度計(jì)劃達(dá)不到2012年年底首臺(tái)機(jī)組發(fā)電的要求,需要通過(guò)實(shí)時(shí)仿真控制后續(xù)施工進(jìn)度計(jì)劃,確保工程按時(shí)完工。
4.2 成果分析
利用施工進(jìn)度實(shí)時(shí)仿真與可視化分析方法,可得到以2011年4月1日作為實(shí)時(shí)控制節(jié)點(diǎn)的1#引水隧洞后續(xù)工序施工進(jìn)度計(jì)劃。
4.2.1 仿真計(jì)算成果
1)1#引水隧洞完工日期。至2012月12月13日,1#隧洞開(kāi)挖、襯砌和灌漿施工完成,具備通水條件。
2)施工關(guān)鍵路線。包括4月份節(jié)點(diǎn)工期、輔3-1-西上斷面、輔3-1-西下斷面、5#底拱臺(tái)車安裝、輔3-1-西邊頂拱襯砌、7#橫通道-輔3洞段襯砌完成、剩余洞段開(kāi)挖、剩余洞段襯砌、1#洞灌漿、1#洞橫通道封堵與清淤、1#洞具備充水條件。
3)1#引水隧洞后續(xù)工序施工橫道圖。通過(guò)對(duì)施工進(jìn)度動(dòng)態(tài)仿真和實(shí)時(shí)控制的反復(fù)調(diào)整,可以得到后續(xù)工序施工的橫道圖,如圖8所示。
4.2.2 長(zhǎng)距離引水隧洞實(shí)時(shí)進(jìn)度可視化仿真成果
利用VR-Platform三維互動(dòng)仿真平臺(tái),結(jié)合長(zhǎng)距離引水隧洞的實(shí)時(shí)進(jìn)度,可以得到截至2011年4月1日的可視化仿真成果。文章以上斷面開(kāi)挖進(jìn)度為例,如圖9所示。

圖8 1#引水隧洞施工進(jìn)度實(shí)時(shí)控制橫道圖Fig.8 Construction schedule real-time control bar chart of diversion tunnel 1
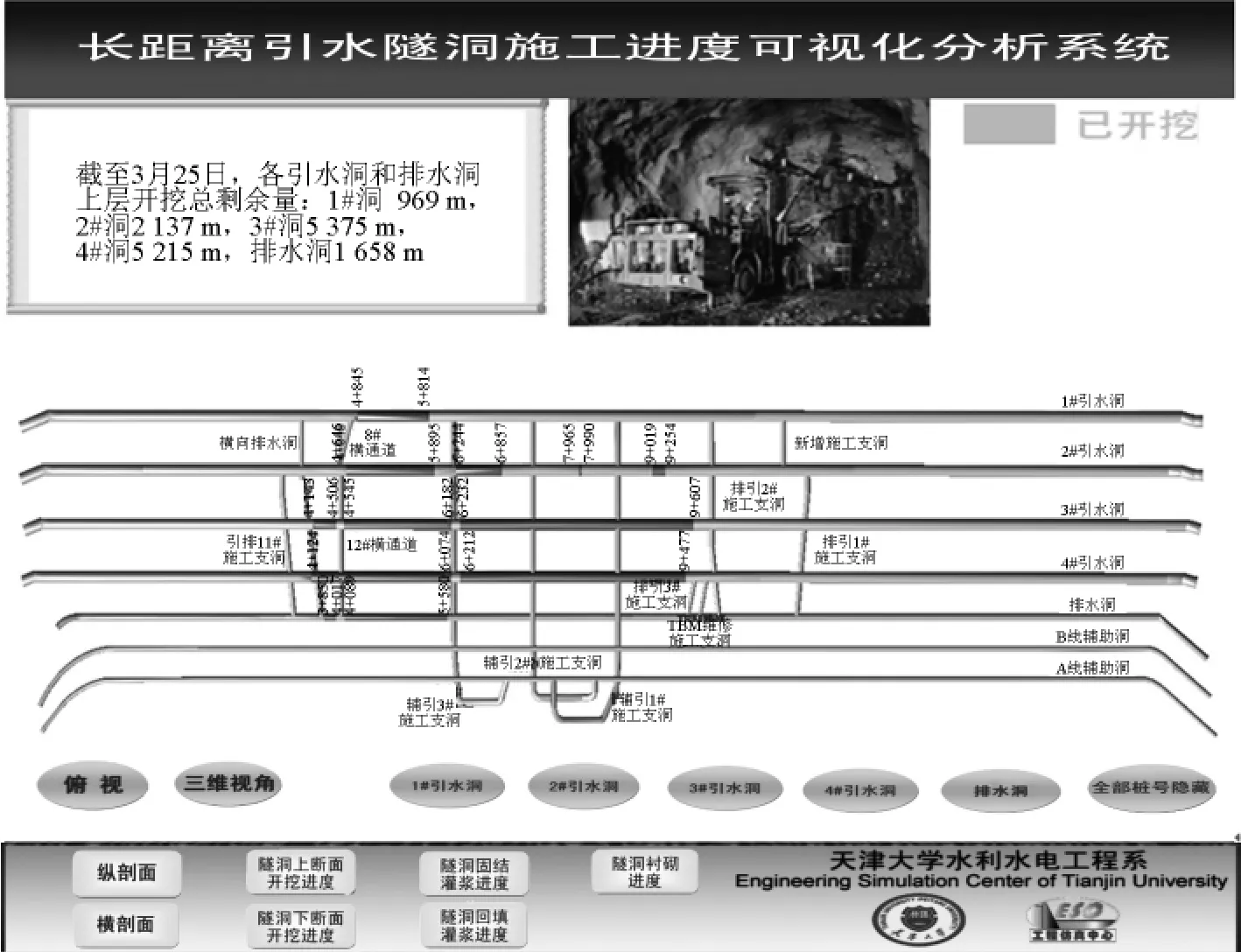
圖9 長(zhǎng)距離引水隧洞施工進(jìn)度可視化仿真分析圖Fig.9 Construction schedule visual simulation analysis chart of the long distance diversion tunnel
5 結(jié)語(yǔ)
文章提出了基于仿真的長(zhǎng)距離引水隧洞施工全過(guò)程進(jìn)度實(shí)時(shí)控制與可視化分析方法。通過(guò)對(duì)施工全過(guò)程進(jìn)度實(shí)時(shí)仿真分析,可以得到任意時(shí)刻后續(xù)的施工進(jìn)度計(jì)劃,包括后續(xù)施工的關(guān)鍵路線、橫道圖等仿真成果;通過(guò)基于VR-Platform的實(shí)時(shí)進(jìn)度可視化分析,可以實(shí)時(shí)得到任意時(shí)刻的三維進(jìn)度形象面貌,包括開(kāi)挖進(jìn)度、襯砌進(jìn)度和灌漿進(jìn)度等。通過(guò)上述方法可以使項(xiàng)目管理人員及時(shí)發(fā)現(xiàn)和處理實(shí)際施工中出現(xiàn)的問(wèn)題,預(yù)測(cè)后續(xù)施工進(jìn)度。實(shí)例研究表明該方法可為工程項(xiàng)目實(shí)時(shí)控制提供強(qiáng)有力的技術(shù)支持,具有很強(qiáng)的實(shí)用價(jià)值。
[1]鐘登華,李景茹,劉奎建.全過(guò)程動(dòng)態(tài)仿真技術(shù)及其在大型工程施工管理中的應(yīng)用[J].天津大學(xué)學(xué)報(bào),2003,36(3):347-352.
[2]康鳳舉.現(xiàn)代仿真技術(shù)與應(yīng)用[M].北京:國(guó)防工業(yè)出版社,2001.
[3]溫家林.網(wǎng)絡(luò)計(jì)劃軟件編制及其在施工仿真中的應(yīng)用[D].天津:天津大學(xué),2008.
[4]劉奎建.大型地下洞室群施工進(jìn)度實(shí)時(shí)控制研究[D].天津:天津大學(xué),2007.
[5]李景茹,鐘登華,劉東海,等.水利水電工程三維動(dòng)態(tài)可視化仿真技術(shù)與應(yīng)用[J].系統(tǒng)仿真學(xué)報(bào),2006,18(1):116-119.
[6]王 帥.魯?shù)乩叵露词胰菏┕?dòng)態(tài)可視化仿真與優(yōu)化研究[D].天津:天津大學(xué),2007.
[7]鐘登華,劉奎建.基于實(shí)時(shí)仿真的地下洞室群施工進(jìn)度預(yù)測(cè)與控制[J].天津大學(xué)學(xué)報(bào),2007,40(6):721-725.
[8]Falco M D,Macchiaroli.Timing of control activities in project planning[J].International Journal of Project Management.1998,16(1):51-58.
[9]吳世勇,王 鴿.錦屏二級(jí)水電站深埋長(zhǎng)隧洞群的建設(shè)和工程中的挑戰(zhàn)性問(wèn)題[J].巖土力學(xué)與工程學(xué)報(bào),2010,29(11):2161-2171.
[10]Carr Robert I.Cost,schedule and time variances and integration[J].Journal of Construction Engineering and Management,1993(6):245-265.
[11]Simaan Abourizk,Yasser Mohamed.Optimal construction project planning[C]//Proceedings of the 2002 Winter Simulation Conference(0780376145).San Diego:IEEE,2002:1704-1708.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2022年3期)2022-08-22 00:32:50
云南化工(2021年8期)2021-12-21 06:37:54
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
海洋信息技術(shù)與應(yīng)用(2020年1期)2020-06-11 12:43:56
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
傳媒評(píng)論(2019年4期)2019-07-13 05:49:14
水利規(guī)劃與設(shè)計(jì)(2017年8期)2017-12-20 08:24:07
家庭影院技術(shù)(2017年12期)2017-02-06 02:32:16
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
