模擬潛望鏡半實物仿真系統設計與實現
2011-08-20 08:41:12楊國志熊先鋒賈玉柱張文彬
艦船科學技術 2011年9期
楊國志,熊先鋒,賈玉柱,張文彬
(1.海軍工程大學船舶與動力學院,湖北 武漢 430033;2.海軍92196部隊,山東 青島 266011)
0 引言
系統仿真是利用科學技術方法構造能反映實際系統表征和基本特性的模型,以達到對系統實驗、分析、研究的目的[1],在復雜系統和裝備研制、生產、訓練的各個環節都得到廣泛的運用。隨著武器裝備的發展,潛艇作為一種水下作戰武器,其潛望鏡的戰術作用不可忽視,被稱作潛艇的“眼睛”,指揮員的航行、作戰等指令決策很大程度上要依靠潛望鏡的觀察情況。依托實際裝備的航行訓練、演習是目前部隊針對潛望鏡使用訓練的普遍途徑,而利用仿真手段設計模擬潛望鏡參與該項訓練,將大大降低訓練成本和提高訓練效果。為此,我們開發設計了潛艇模擬潛望鏡仿真系統。
1 模擬潛望鏡仿真系統總體結構
針對潛望鏡實際裝備的使用和技術情況,設計了模擬潛望鏡本體硬件系統、虛擬視景及控制模塊及潛艇運動控制模塊等為主體的半實物仿真系統,如圖1所示。
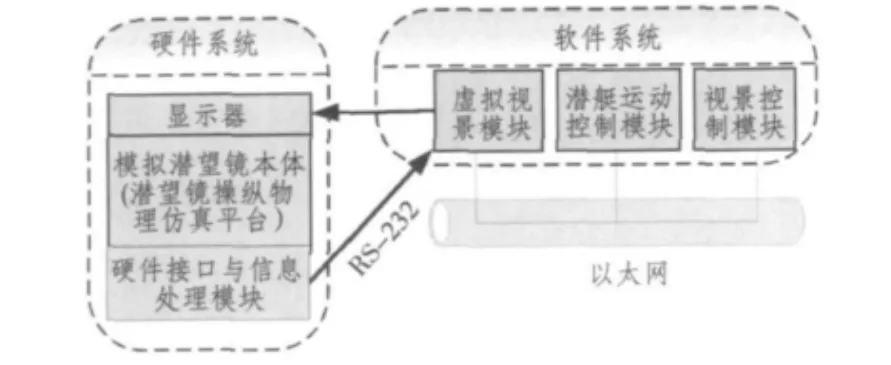
圖1 模擬潛望鏡仿真系統結構Fig.1 Structure of periscope's simulation syatem
模擬潛望鏡本體硬件系統是參訓人員操作的物理仿真平臺,硬件接口與信息處理模塊采集和處理潛望鏡操作控制部件電氣信號,并將這些信號傳送給虛擬視景模塊產生相應的場景變化;視景控制模塊構建虛擬海洋環境、地理信息、目標信息等場景案例;潛艇運動控制模塊提供本艇運動的主要姿態參數;虛擬視景模塊根據以上信息渲染潛望鏡視景,并傳送到模擬潛望鏡本體的顯示器終端。系統利用RS-232及以太網實現數據的實時通信。
2 模擬潛望鏡本體硬件系統
2.1 硬件系統主要技術設計
參照潛望鏡實體結構原理,針對潛望鏡操作和使用特點,在保持模擬潛望鏡與實體外觀和基本功能一致的前提下,對其基本硬件部位進行了電路設計,主要的技術手段包括:
1)視野光路。選用液晶顯示器作為虛擬視景的終端設備,與潛望鏡目鏡之間使用光學透鏡構造光路,調整透鏡的位置和方向,構建模擬視野光路,并保持目鏡調焦、單雙目切換等基本功能。
2)基本操作設備的改造。保持實體外觀一致的情況下,對倍率選擇、濾鏡選擇及俯仰控制等部件,改換適當的位置開關接入,應用程序采集位置狀態進行操作的識別。
3)潛望鏡轉動角度的跟隨。在虛擬潛望鏡中心轉軸上固接能同步轉動的旋轉編碼器,作為潛望鏡轉動角度測量的設備。旋轉編碼器的選用主要考慮脈沖計數輸出范圍、頻率等方面的適用條件,保證跟蹤轉動角度準確、實時。
4)測距及顯示模塊。設計了矩陣鍵盤和數碼管顯示電路,作為潛望鏡測距功能部分的模擬設備。
2.2 硬件系統主要接口設計
根據系統需要,專門設計了硬件采集和驅動電路,采用RS-232串行通信與虛擬視景模塊進行數據交換。主要功能設計有:
1)采用8255芯片擴展采集旋轉編碼器位置。旋轉編碼器脈沖計數芯片選用QA740808R,數據寬度為24位,保證數據的精度和范圍。
2)采用8255芯片作為數字量I/O通道,實現控制部件狀態采集和測距顯示模塊的控制。控制部件開關狀態直接接入8255數據端口,而潛望鏡測距顯示模塊的矩陣鍵盤和數碼管顯示,設計了擴展電路進行控制。
3)硬件系統采用51系列單片機芯片,使用C語言開發編程,主要實現對8255芯片擴展功能的控制,以及RS-232串行通信與上位機進行數據交換。為了達到系統實時性的要求,使用了單片機時間中斷和串口中斷進行進程控制。
3 虛擬視景及控制模塊
3.1 虛擬視景模塊軟件設計與實現
近年來出現了多種虛擬作戰視景仿真需要的仿真支撐軟件,如OpenGL、Vetree、3Dmax等,而實時三維建模和仿真軟件MultiGen Creator和Vega由于其先進的功能在包括軍事的各個工程領域的視景仿真開發中得以廣泛采用。本系統采用MultiGen Creator實時三維建模工具,高效、優化地生成實時三維(RT3D)數據庫,與實時仿真軟件Vega緊密結合,完成潛望鏡虛擬視景的構建。

圖2 潛望鏡視景效果截屏Fig.2 Interface of periscope's virtual scene
利用可視化的應用程序開發工具VC++編寫了基于MFC的Vega應用程序,實現了潛望鏡視景場景的驅動和渲染。主要作了如下幾個方面的處理:
1)對object進行結構化管理。為了有效管理object的各種信息(靜態、動態屬性以及添加/刪除指令、特效等控制信息),定義了object結構。

2)使用fst模型文件格式載入模型。Vega提供了一種轉換工具可以把adf文件里的flt模型文件轉換為 fst文件格式[2-3]。Vega的 fst文件格式為系統盡可能快的加載模型到場景中提供了一種有效的途徑。fst文件的數據方式與Vega場景里需要的方式非常相似,所以可以非常快的載入。其他的文件格式在加入Vega場景時對系統運行時間沒有什么影響,但在系統需要動態實時調入模型數據尤其是大規模模型數據時就有很大的延時,影響渲染效果。
3)視景觀察者的控制。潛望鏡作為視景環境的觀察者,這里采用手動調整方式來控制它在場景中的位置和姿態。視景渲染進程循環中實時接收潛望鏡的操縱控制信息和潛艇的運動姿態數據,更新觀察者的位置和姿態,給出潛望鏡與本艇結合的動態效果。
4)創建單獨的線程完成Vega渲染的任務。MFC把線程分為用戶界面線程和工作者線程:用戶界面線程一般用于處理用戶輸入事件并對事件做出響應,實現線程的代碼中含有消息循環;工作者線程與用戶界面無關,主要用于各種耗時的計算量大的場合[3]。Vega系統需要實時的進行渲染循環,這是個非常耗時的計算過程,顯然創建單獨的工作者線程來完成Vega渲染的任務是恰當的。
5)碰撞檢測和特效處理。使用Isector實例與視景中的角色對象綁定,根據相交測試結果實時增加爆炸、煙火等特效。考慮到相交測試的計算量對CPU的占用,這里只選取相交點坐標和相交的模型對象名稱2種相交測試的結果信息進行處理,減少相交測試的計算量。
3.2 視景控制功能設計與實現
視景控制模塊在VC++環境下開發,主要任務包括:
1)海圖信息的處理。加載海圖信息,并完成海圖信息的提取、計算、顯示等工作;
2)環境設置。以菜單形式進行海況(風浪等級)、天氣(陰晴雨雪)、時間(晨午夜)、光線(明暗)、能見度等自然環境的選擇設置;
3)目標設置。可使用鼠標對目標進行增減、移動、改變屬性等控制,進行目標方位、航向、航速、航線等信息的設置,并在海圖中實時更新。
電子海圖用于圖形化實時反映仿真環境的態勢變化,通過讀取地理信息數據文件并進行判斷處理后繪制地圖,除了經緯度標定、測距、測角等功能外,還可以實現對地圖的縮放、移動等靈活操作。艦船、島嶼等目標信息的態勢變化通過坐標映射、動態繪圖的方法在以海圖為背景的界面上以線條圖標的形式顯示。
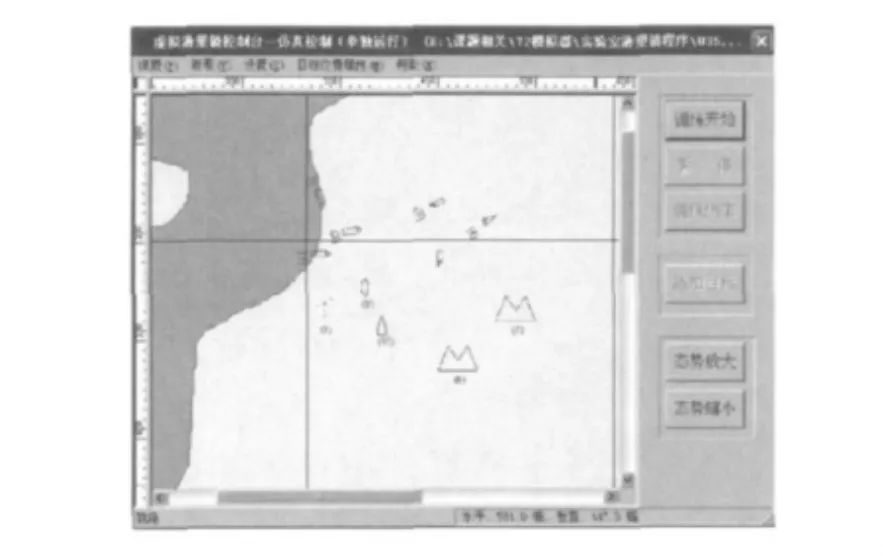
圖3 視景控制程序主界面Fig.3 Main interface of scene control program
4 潛艇運動控制模塊
潛艇可視為一個剛體,其運動可以分解成沿通過潛艇重心G的三根垂直相交軸方向的移動及繞各軸的轉動,即六自由度的運動。根據使用目的和實驗條件不同,潛艇操縱方程的形式較多,這里選用潛艇運動線性方程[4],利用狀態空間矢量法建立仿真模型。根據實艇操縱經驗,通過對各水動力系數的分析,忽略一些次要水動力系數的作用,同時還充分考慮了各自由度運動之間的耦合影響。
垂直面運動線性方程:

水平面運動線性方程:

式中:m,P,V分別為潛艇質量、重力和航速;Iy和Iz為對動系坐標軸的轉動慣量;u,v,w分別為縱向速度、橫向速度和垂向速度;p,q,r分別為橫傾角速度、縱傾角速度和回轉角速度;Z0和M0分別為零升力和零升力矩;Zw,,Zδb,,Yv,,Yr,Yδ,,Nr等為對應的水動力系數。
采用狀態空間法求解潛艇運動空間矢量方程,利用Matlab/Simulink工具箱建立潛艇運動仿真模型,解算出本艇運動的主要參數(位置、深度、航速、航向、縱傾、橫傾等姿態信息),實現潛望鏡與本艇的動態姿態匹配。

圖4 系統運行信息流程Fig.4 Flow chart of system running information
5 系統運行流程及測試
整個仿真系統的運行以模擬潛望鏡為物理實物,計算機仿真系統實時解算、控制。系統主要的信息流程如圖4所示。從系統運行情況來看,數據傳輸穩定、實時性好,能滿足訓練要求。
6 結語
該半實物仿真系統的設計和實現,為潛望鏡系統的使用訓練提供了方便、經濟的方法,能在保證物理操作感覺真實、虛擬視景逼真的前提下,反映潛望鏡使用的基本工作原理。該系統已經成功運用到某型潛艇操縱模擬器系統,與潛艇操縱訓練結合(提供操縱、運動姿態信息)開展潛望鏡系統使用訓練,并取得較好的仿真訓練效果。該系統軟件接口開放,還可以與導航、對抗、魚攻等訓練模塊結合,形成綜合仿真訓練系統。
[1]單家元,孟秀云,丁艷.半實物仿真[M].北京:國防工業出版社,2008.
[2]葉疊,仲梁維,羅云.基于Vega/MultiGen的三維仿真漫游系統的研究與實現[J].計算機工程與設計,2005,26(2):362-363.
[3]龔卓容.Vega程序設計[M].北京:國防工業出版社,2002.
[4]邢繼峰,林俊興,戴余良.潛艇操縱[M].武漢:海軍工程大學出版社.2003.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32