Matlab在控制理論時域分析法教學中的應用
2011-11-15 01:32:12戴成梅
巢湖學院學報 2011年6期
劉 偉 戴成梅
(周口師范學院物理與電子工程系,河南 周口 466001)
Matlab在控制理論時域分析法教學中的應用
劉 偉 戴成梅
(周口師范學院物理與電子工程系,河南 周口 466001)
時域分析法是一種直接在時間域中對系統進行分析的方法,具有直觀和準確的優點.它是根據控制系統輸入與輸出之間的時域表達式,分析系統的穩定性、瞬態過程和穩態誤差.根據自動控制原理課程的特點和授課內容要求,結合多媒體教學實踐,提出了在課堂上將MATLAB的函數功能和PowerPoint課件有機融合起來的現場教學方法.該方法不僅圖文并茂、動靜結合,而且可以讓學生看到實時的科學計算結果,從而有效的激發學生的學習興趣,加深學生對抽象理論知識的理解和彌補實驗環節的不足.
MATLAB軟件;時域分析;瞬態指標;仿真曲線
《自動控制原理》是高等工科院校自動化專業和電子信息類專業的一門重要基礎課程,其應用領域非常廣泛,幾乎遍及電類及非電類的各個工程技術學科.學好這門課程,掌握自動控制的基本原理,學會自動控制系統的分析和設計方法,對于高等工科院校自動化專業和電子信息類專業的學生來說是非常重要的.在自動控制原理教學過程中,常常要分析同一系統在不同參數情況下對同一信號源的不同響應過程及相應的瞬態過程指標,這就需要畫一些函數曲線,我們嘗試著將仿真軟件MATLAB引入到傳統的教學中來,將大量的曲線圖表清晰的展現在學生面前.通過實踐,取得了較好的教學效果.MATLAB簡介 MATLAB(Matrix Laboratory,即“矩陣實驗室”)是美國Mathworks公司于1984年推出的一種面向科學與工程的計算軟件,它將不同領域的計算集成為函數的形式,用戶在使用時,只需調用這些函數并賦予實際參數就能解決實際問題.MATLAB軟件已經成為應用代數、自動控制原理、數字信號分析與處理、時問序列分析、統計應用、動態系統仿真等學科的一個重要工具[1].
1 線性系統穩定性分析
線性系統穩定的充要條件是系統的特征根均位于S平面的左半部分.系統的零極點模型可以直接被用來判斷系統的穩定性.另外,MATLAB語言中提供了有關多項式的操作函數,也可以用于系統的分析和計算[2].
1.1 直接求特征多項式的根
設p為特征多項式的系數向量,則MATLAB函數roots()可以直接求出方程p=0在復數范圍內的解v,該函數的調用格式為:

例1已知系統的特征多項式為:

特征方程的解可由下面的MATLAB命令得出。
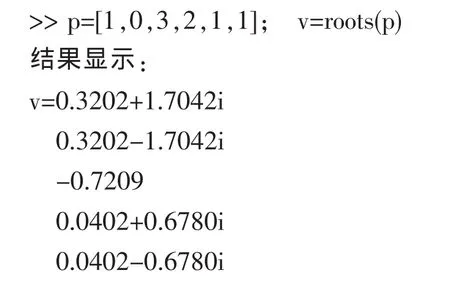
利用多項式求根函數roots(),可以很方便的求出系統的零點和極點,然后根據零極點分析系統穩定性和其它性能.
1.2 零極點分布圖。
在MATLAB中,可利用pzmap()函數繪制連續系統的零、極點圖,從而分析系統的穩定性,該函數調用格式為:

例2給定傳遞函數:

利用下列命令可自動打開一個圖形窗口,顯示該系統的零、極點分布圖,如圖1所示.
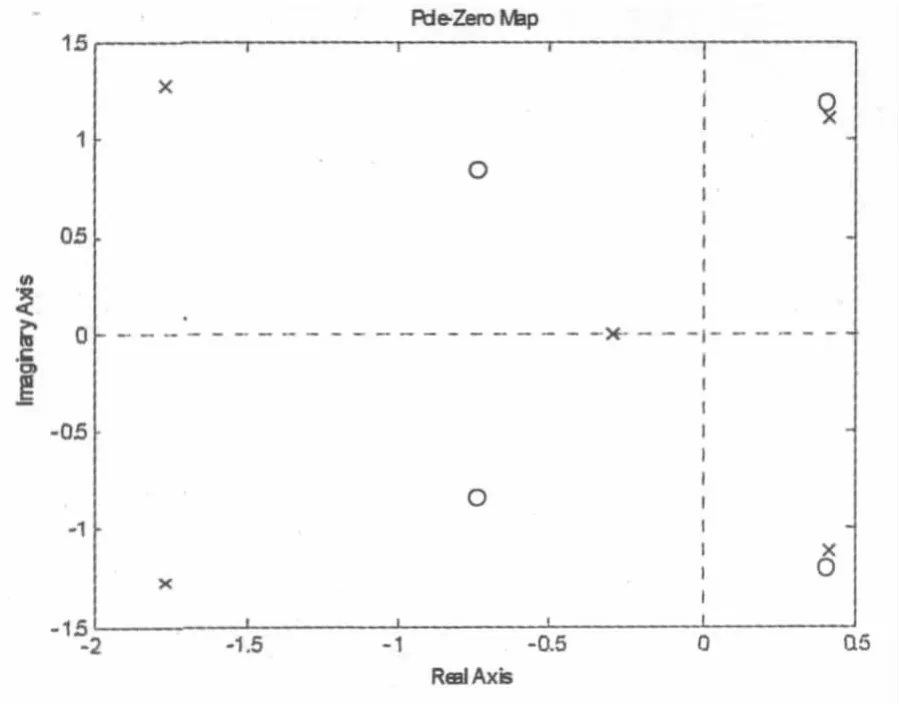
圖1 系統的零、極點分布圖
2 系統動態特性分析
2.1 單位階躍響應的求法:
控制系統工具箱中給出了一個函數step()來直接求取線性系統的階躍響應,如果已知傳遞函數為:
則該函數可有以下幾種調用格式:
該函數將繪制出系統在單位階躍輸入條件下的動態響應圖,同時給出穩態值.如果需要將輸出結果返回到MATLAB工作空間中,則采用以下調用格式:

例3已知傳遞函數為:
利用以下MATLAB命令可得階躍響應曲線如圖2所示.
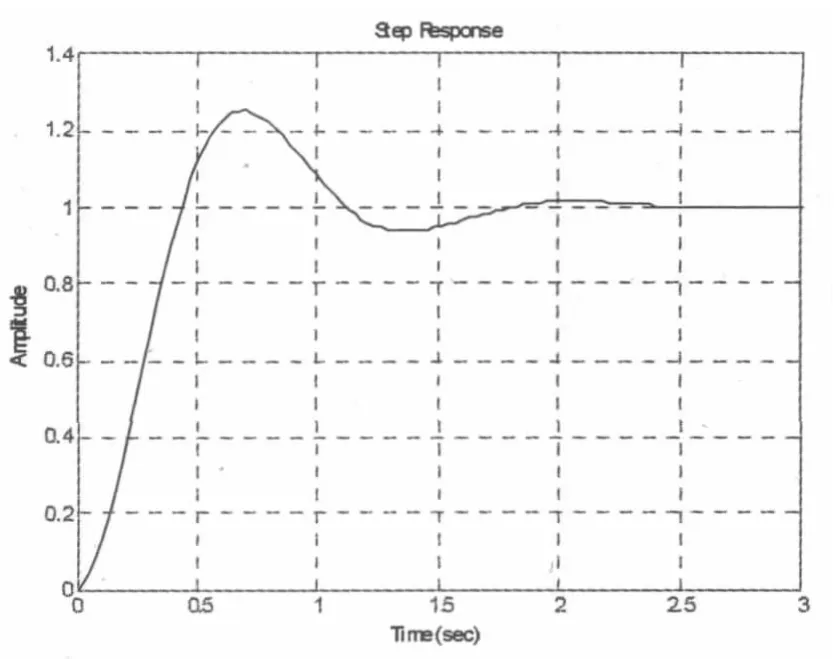
圖2 MATLAB繪制的響應曲線
2.2 求階躍響應的性能指標
MATLAB提供了強大的繪圖計算功能,可以用多種方法求取系統的動態響應指標.我們首先介紹一種最簡單的方法——游動鼠標法.對于例3,在程序運行完畢后,用鼠標左鍵點擊時域響應圖線任意一點,系統會自動跳出一個小方框,小方框顯示了這一點的橫坐標(時間)和縱坐標(幅值).按住鼠標左鍵在曲線上移動,可以找到曲線幅值最大的一點——即曲線最大峰值,此時小方框中顯示的時間就是此二階系統的峰值時間,根據觀察到的穩態值和峰值可以計算出系統的超調量.系統的上升時間和穩態響應時間可以依此類推.另一種比較常用的方法就是用編程方式求取時域響應的各項性能指標.與上一段介紹的游動鼠標法相比,編程方法稍微復雜,但通過下面的學習,讀者可以掌握一定的編程技巧,能夠將控制原理知識和編程方法相結合,自己編寫一些程序,獲取一些較為復雜的性能指標[3].
通過前面的學習,我們已經可以用階躍響應函數step()獲得系統輸出量,若將輸出量返回到變量y中,可以調用如下格式

該函數還同時返回了自動生成的時間變量t,對返回的這一對變量y和t的值進行計算,可以得到時域性能指標.
①峰值時間(timetopeak)可由以下命令獲得:

應用取最大值函數max()求出y的峰值及相應的時間,并存于變量Y和k中.然后在變量t中取出峰值時間,并將它賦給變量timetopeak.
② 最大(百分比)超調量(percentovershoot)可由以下命令得到:
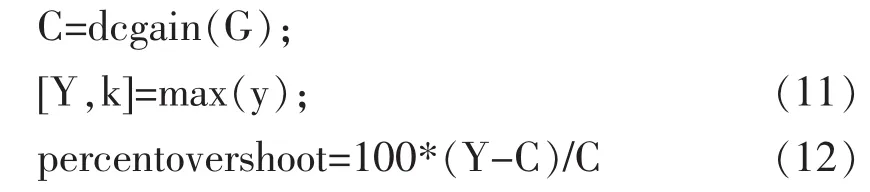
dcgain()函數用于求取系統的終值,將終值賦給變量C,然后依據超調量的定義,由Y和C計算出百分比超調量.
③ 上升時間(risetime)可利用MATLAB中控制語句編制M文件來獲得.要求出上升時間,可以用while語句編寫以下程序得到:

在階躍輸入條件下,y的值由零逐漸增大,當以上循環滿足y=C時,退出循環,此時對應的時刻,即為上升時間.
對于輸出無超調的系統響應,上升時間定義為輸出從穩態值的10%上升到90%所需時間,則計算程序如下:
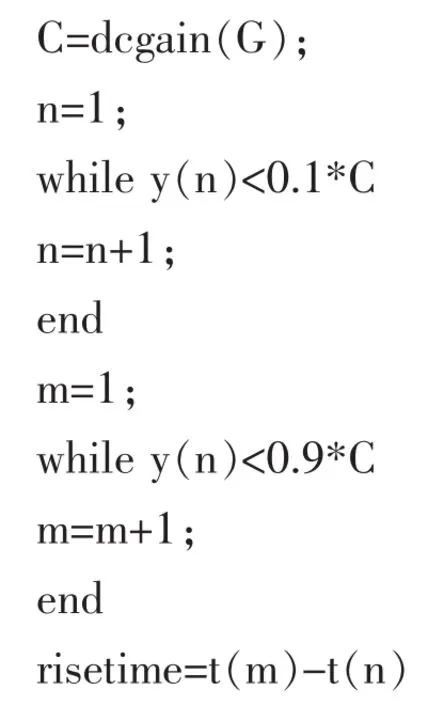
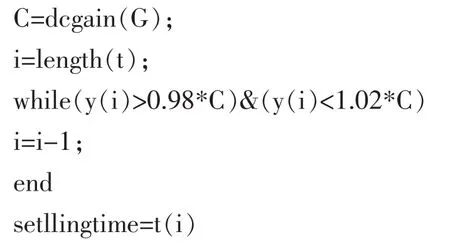
用向量長度函數length()可求得t序列的長度,將其設定為變量i的上限值[4].
例4已知二階系統傳遞函數為:

利用下面的stepanalysis.m程序可得到階躍響應如圖3及性能指標數據.
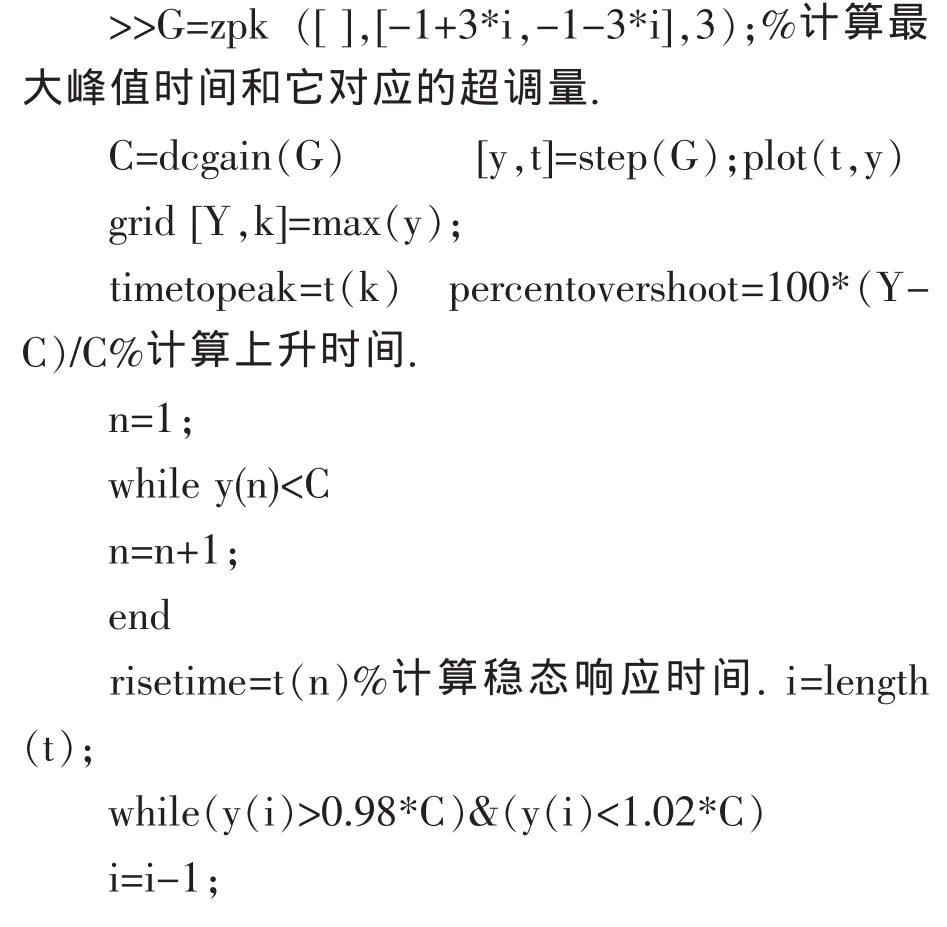
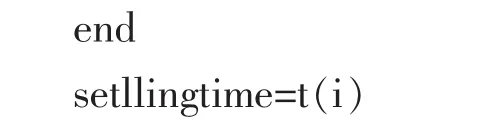
運行后的響應圖如圖3,命令窗口中顯示的結果為


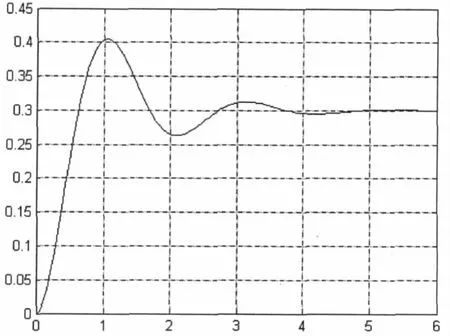
圖3 二階系統階躍響應
由于課堂上直接進行演示,使得本課程教師教起來輕松,學生學起來愉悅,提高了上課效率,也使得該課程的教學更加生動、活躍,方便學生理解和掌握比較抽象的問題,有助于學生獨立學習和科研能力的提高.在MATLAB中,已經把復雜的概念和數學公式編織成可以直接調用的函數.可以調用來講解許多概念和理論的實際意義和應用,因此我們在演示圖形時只是將MATLAB作為一種輔助教學手段,淡化了程序的編寫過程,程序的編寫非常簡潔,只讓學生觀察仿真結果和比較各個圖形,使課本中的抽象原理形象化,提高了教學效果.
[1]黃忠霖.控制系統MATLAB計算及仿真[M].北京:國防工業出版社,2001.
[2]薛定宇.反饋控制系統設計與分析-MATLAB[M].語言應用,北京:清華大學出版社,2000.
[3]朱漢敏.Matlab在靜電場教學中的優越性[J].上海電力學院學報,2005,(3):66-68.
[4]魏可新.Matlab語言與自動控制系統設計[M].北京:電子工業出版社,2002.
THE APPLICATION OF MATLAB IN THE TEACHING OF TIME DOMAIN ANALYSIS METHOD IN CONTROL THEORY
LIU WeiDAI Cheng-mei
(Department of Physics and Electrionic Engineering,Zhoukou Normal University,Zhoukou Henan 466001)
Time domain analysis method is a direct system analysis method in the time domain with an intuitive and accurate advantage.It is based on the control between the system input and output time domain expression,analysising the stability of the system,transient state and steady error.According to the principle of automatic control course characteristics and teaching contents and combining multimedia teaching practice,This paper presents MATLAB function and PowerPoint courseware of organic integration of the scene teaching method in the class. The method is not only illustrated by use of pictures and text,static and dynamic,and allows students to see the real scientific results In order to effectively stimulate students interest in learning,it Deepens the student to understand the theory of abstraction and makes up for the inadequacy of link experiment.
Matlab software,time domain analysis,transient standard,simulation curve
G71
A
1672-2868(2011)06-0140-04
2011-11-07
河南省教育廳自然科學研究計劃項目(項目編號:2009B510020)
劉偉(1976-),女,河南太康人。講師,碩士,研究方向:智能控制
責任編輯:陳 鳳
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
電子制作(2018年18期)2018-11-14 01:48:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
山東工業技術(2016年15期)2016-12-01 05:31:22
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
