類骨骼肌電磁直線驅動器設計
2011-11-20 08:34:42秦現生尤向榮王占璽張雪峰
微特電機 2011年9期
李 靖,秦現生,尤向榮,王占璽,張雪峰
(西北工業大學,陜西西安710072)
0 引 言
隨著機器人技術的發展,機器人關節通常采用的傳統的“旋轉電機+傳動機構”方式已不能滿足越來越高的性能要求。仿生肌肉式的直線驅動器相比傳統的結構,有結構簡單、體積小、加速度大、能量密度高等優勢,隨著科技的發展,應用于各種研究中[1],特別是機器人領域。人工肌肉驅動和仿生關節設計受到了廣泛的重視,基于人工肌肉的關節設計已成為研究熱點。
常用的仿生肌肉包括電磁激勵、壓電超聲波電動機、氣動、液動、聚合物、形狀記憶合金、電磁等,如美國波士頓動力公司研發的BigDog[2],驅動采用液動系統;韓國的Byungkyu Kim等則將形狀記憶合金用于驅動仿生蚯蚓機器人[3];韓國Hoon C.Park等[4]使用壓電材料作為微型飛行器的驅動裝置,翼的工作頻率可達9 Hz;日本的Koh Hosoda等[5]制作的雙足機器人使用氣動人工肌肉驅動,可以實現跑、跳、走三種運動;中國徐偉[6]等設計并制作了磁性橡膠人工肌肉等。其中,電磁驅動的仿肌肉驅動裝置具有優秀的驅動特性和高疲勞壽命,并且還應具有疲勞壽命大、強度好、功率密度大和柔順性好等特征,較之其它方式的仿肌肉驅動裝置在應變[1]和執行位移都有較大的優勢[7]。模仿哺乳動物骨骼肌肌肉結構及運動形式設計一種直線驅動裝置,將大大改善現有直線電機的性能。
本文在分析哺乳動物骨骼肌構成和驅動機理的基礎上,提出一種骨骼肌類肌小節直線電磁驅動器串并聯陣列人工肌肉設計方案。
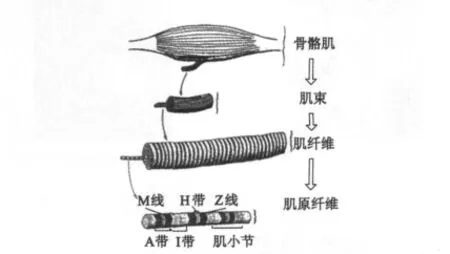
圖1 哺乳動物骨骼肌組成結構圖[11]
1 生物骨骼肌的結構及工作原理
哺乳動物的肌肉一般分為三類:骨骼肌、心肌、平滑肌。骨骼肌作為動物運動的發動機,完成了如跑步、跳躍等運動[8-10]。動物骨骼肌結構圖如圖1所示,作為基本單元的肌小節通過串聯的方式組成了肌原纖維,若干肌原纖維通過并聯的方式組成了肌纖維,若干肌纖維通過并聯的方式組成了肌束,若干肌束通過并聯的方式組成了骨骼肌,骨骼肌附著在骨骼上,通過收縮拉伸協同工作帶動人體產生了運動。
Huxley H E和Huxley A F在1954年分別獨立地提出肌肉收縮的肌絲滑行學說(sliding-filament theory of muscle contraction)[12]。該學說認為肌肉的收縮(也就是肌肉的縮短)是細肌絲(肌動蛋白纖維)在粗肌絲(肌球蛋白纖維)之間主動地相對滑行的結果。骨骼肌的收縮與舒展是由最小單位肌小節狀態決定的,肌小節伸張狀態,粗肌絲、細肌絲之間的重疊減少,即為肌肉的伸展;肌小節收縮狀態,粗肌絲、細肌絲之間的重疊增加,即肌肉的縮短。肌纖維中肌小節的顯微結構如圖2所示,其展現了肌小節的兩種狀態,A部分為肌小節伸張狀態;B部分為肌小節收縮狀態;C部分為細肌絲與粗肌絲重合部分的構示意圖。
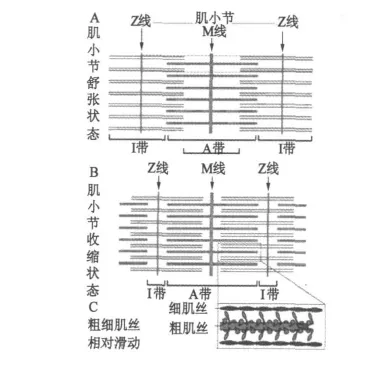
圖2 肌纖維中肌小節的顯微結構
骨骼肌絕大多數通過肌腱附著在骨骼上,通過收縮帶動骨骼,在神經系統的支配下協調工作完成人體的各種隨意運動。以人體下肢為例,圖3a表示右腿骨胳肌與骨骼之間的附著聯結關系,圖3b表示右腿伸展運動肌群。
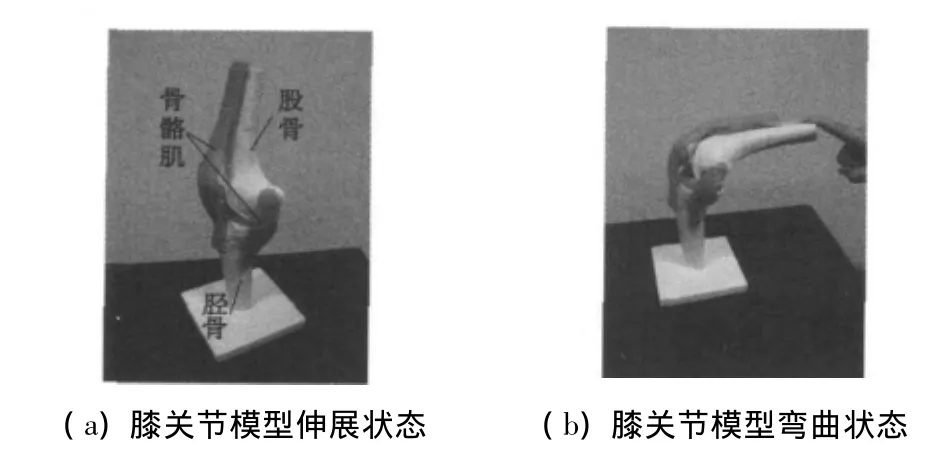
圖3 人體膝關節模型
2 人工肌肉實現模式
人工肌肉仿真骨骼肌的結構,先串聯類骨骼肌肌小節構成類肌原纖維驅動器;再通過并聯類肌原纖維驅動器來構成人工肌肉。通過增加串聯類肌小節驅動器的數量可以提高瞬時速度和加速度,通過增加并聯類肌原纖維驅動器的數量則可以提高人工肌肉的整體負載能力。
模擬骨骼肌附著生物體的形式,人工肌肉通過鉸鏈連接附著在機械結構上,以人體下肢仿生關節為例進行分析說明。人體下肢膝關節伸展運動由股四頭肌驅動完成。人體膝關節有三個自由度,為了簡化設計與控制,機器人關節通常只保留一個自由度,保留股四頭肌作用于該自由度的骨骼肌。仿生關節模型示意圖如圖4所示。

圖4 仿生關節模型示意圖
2.1 類肌原纖維驅動器
類肌原纖維驅動器由類肌小節驅動器通過串聯的方式構成。以三級類肌小節驅動器串聯組成的一個仿肌肉驅動器為例,其連接方式如圖5所示:Ⅰ、Ⅱ、Ⅲ為三個結構完全相同的類肌小節驅動器,Ⅱ級的軸(動子)連在Ⅰ的端蓋(靜子)上,Ⅲ級的軸連在Ⅱ的端蓋上,三個基本單元依次相連,組成了類肌原纖維驅動器。
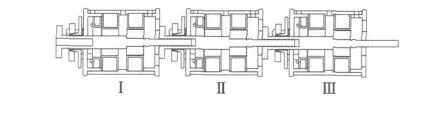
圖5 肌小節串聯組成的肌原纖維模式
2.2 類肌小節驅動器
肌小節為組成骨骼肌的基本單元,采用仿生骨骼肌肌小節結構對類肌小節驅動器進行設計,其三維模型徑向剖視圖如圖6所示。類肌小節驅動器主要由三個模塊組成,分別是動子模塊、靜子模塊和抱閘模塊。其中包括動子模塊包含的零件有軸,永磁體;靜子模塊包含的零件有左端蓋、機殼、A向線圈骨架、A相線圈、B相線圈骨架、B相線圈、右端蓋。抱閘模塊包含的零件有扣件、鎖緊件、彈簧、抱閘線圈骨架、抱閘線圈、固定螺栓、頂桿。
類肌小節驅動器設計原理是利用線圈繞組產生的磁場和永磁體的磁場相互作用,通過控制左右線圈的通電電流的大小和方向控制永磁體的具體位置和力的大小。另外還對仿生裝置設計了抱閘機構,在實際應用中,單純的靠電磁力來維持仿肌肉驅動器的運行狀態,需要不斷通入電流,而這樣必然產生很多的熱量,使驅動器溫度升高,不利于運行。根據肌肉的纖維運動結構仿生,設計的抱閘系統能最大限度地提高驅動器的效率,節省能源。

圖6 類肌小節驅動器三維模型徑向剖視圖
3 試驗與仿真
3.1 電磁仿真參數設置
一般直線電磁驅動器本身所具有的特點決定了自身存在的缺點:磁路開斷所引起的邊端效應以及安裝氣隙較大等問題。故仿生肌肉直線驅動器的性能由電磁場設計的合理與否、工作環境與電磁參數的選擇等因素有關。選擇一種精確的仿真算法和仿真軟件,可以大大減少設計優化過程的反復工作與實驗成本。本文采用的Maxwell 2D,包括交流/直流磁場、靜電場以及瞬態電磁場、溫度場分析、參數化分極以及優化功能[13]。
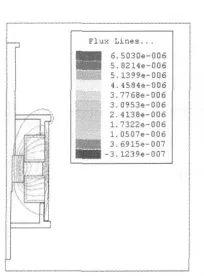
圖7 類肌小節驅動器電磁分析曲線
考慮到電機的結構,故采用軸對稱坐標即RZ平面進行仿真。為了簡化分析,電機簡化為軸、永磁體、端蓋、機殼、線圈骨架、相線圈。其中永磁體選擇NdFeB,軸、端蓋、線圈骨架為鋁,線圈為銅,機殼為45號鋼。
線圈單根導線通過電流大小為0.5~1 A,線圈匝數為360匝~380匝,這里按照電流大小為0.5 A、匝數為360匝為基準。給線圈施加電流源時,設置其中一個線圈總體面積通過總電流為180 A,另一個線圈總體面積通過總電流為-180 A。
按照上述條件對類肌小節驅動器用Maxwell軟件進行仿真求解,其電磁場磁力電磁曲線如圖7所示。計算結果顯示,動子和靜子在豎直方向上產生的電磁力為3.1 N。仿肌小節驅動器的質量經測量為22 g,力重比達到了14.4。
3.2 測試結果
依照仿真結果制造類肌小節驅動器如圖8所示,圖8a為類肌小節直線驅動器樣機整體結構,圖8b為類肌小節直線驅動器樣機分解結構。通過測試得到類肌小節驅動器響應速度可以達到毫秒級,最大效率可以達到90%以上,最大應變也在40%以上,功率密度達到200 W/kg。

圖8 肌小節串聯組成的肌原纖維模式
3.3 機械仿真
用Solidworks建立機器關節三維模型為例,用其中的Motion功能對機器關節運動參數進行仿真,如圖9所示。在本實施例中,兩個擺動桿通過鉸鏈聯接,肌肉仿生驅動裝置聯接在兩個固定端子上,固定端子通過鉸鏈聯接到擺動桿上。肌肉仿生驅動裝置收縮帶動關節運動,其中L1=44 mm,L2=36 mm,L3=33 mm,L4=27 mm,關節需要的轉動角度為70°,且基本單元總長為30 mm,壓縮率為50%,即收縮狀態與舒張狀態相差15 mm,由此可以求解出需要串聯3個基本單元,轉動范圍為56.25°~128.04°,轉動角度為71.39°。
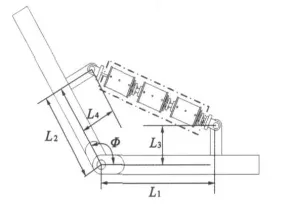
圖9 機器關節模型示意
4 結 語
本文在分析動物骨骼肌的結構和運動形式上,設計了基于電磁力的肌肉仿生驅動器,經仿真分析及試制樣機實測研究,初步發掘出該仿生驅動器具有響應速度高、加速度高、完全無接觸和機械磨損、體積小、質量輕、功率密度高等良好特性。可以預見,經后續完善改進,該仿生驅動器應具有廣泛的應用前景。
[1] 應申舜,秦現生,任振國,等.基于人工肌肉的機器人驅動關節設計與研究[J].機器人,2008,30(2):142-146.
[2] Nelson G,Blankespoor K,Raibert M.Walking BigDog:Insights and challenges from legged robotics[J].Journal of Biomechanics,2006,39:S360.
[3] Byungkyu K.An earthworm-like micro robot using shape memory alloy actuator[J].Sensors and Actuators,2006,125:429-437.
[4] Syaifuddin M.Design and evaluation of LIPCA-actuated flapping device[J].Smart Structures and Materials,2006,15(5):1225-1230.
[5] Koh Hosoda.Biped robot design powered by antagonistic pneumatic actuators for multi-modal locomotion[J].Robotics and Autonomous Systems,2008,56:46-53.
[6] 徐偉,孫序粱,何麗娟.仿生學在人工肌肉研究中的應用[J].機器人,1995,17(5):303-308.
[7] Kwon D,Yang T.Mechatronics Technology in Mobile Devices[J].IEEE Industrial Electronics Magazine,2010,4(2):36-41.
[8] Passerieux E,Rossignol R,Letellier T,et al.Physical continuity of the perimysium from myofibers to tendons:Involvement in lateral force transmission in skeletal muscle[J].Journal of Structural Biology,2007,159(1):19-28.
[9] Yucesoy A,Maas H,Koopman Bart H F J M,et al.Mechanisms causing effects of muscle position on proximo-distal muscle force differences in extra-muscular myofascial force transmission[J].Medical Engineering&Physics,2006,28(3):214-226.
[10] 陳守良.動物生理學[M].第二版.北京:北京大學出版社,2005.
[11] 馮元楨.生物力學[M].北京:科學出版社,1983.
[12] Brian R M,Phil G,Alan J M.Skeletal muscle:form and function[M].Second Edition.Human Kinetics Publishers,2006.
[13] 劉國強.Ansoft工程電磁場有限元分析[M].北京:電子工業出版社,2005.
