圓筒型永磁直線電動機電流L2控制
2011-11-20 08:34:42金朝紅李槐樹宋立忠
微特電機 2011年9期
金朝紅,李槐樹,宋立忠
(海軍工程大學,湖北武漢430033)
0 引 言
當前我國國民經濟正處于結構轉型的關鍵時期,十二五規劃明確提出要對現有制造業進行升級,大力發展先進制造業。直線電動機行業作為基礎行業,直線電動機的發展對我國先進制造業意義重大。1983年隨著價格相對低廉的釹鐵硼永磁材料研制成功,國內外永磁電機的研究開發重點轉移到工業和民用電機上。永磁直線電動機(以下簡稱PMLM)具有體積小、能效高、噪聲小、結構靈活和直驅等特點,廣泛應用在數控機床、工業機器人、信息與自動化、汽車工業、磁懸浮列車等場合[1]。我國每年稀土產量的三分之二用于出口,剩下的三分之一用于電機的部分也很少,因此我國發展永磁直線電動機有巨大的潛力。由于PMLM的磁場不是閉合的,由此產生了邊端效應;永磁直線電動機直接驅動負載,對負載的變化比較敏感;此外,PMLM的機電參數是變化的,如動子質量隨時間變化、電感隨位置而變化、電阻隨溫度變化;同時電動機的模型存在未建模和非線性動態,還存在不確定的外部干擾例如負載的變化、摩擦力的不確定性、電機推力的脈動等,這些干擾直接影響到閉環系統的穩態誤差、極限環和低通帶寬[1]。上述問題使得永磁直線電動機的控制變得比較復雜。為了獲得永磁直線同步電動機高精度控制,必須采取有效的控制策略來抑制系統自身參數及外界環境變化產生的擾動,這就要求控制方法有很強的魯棒性。由于永磁直線電動機系統具有很強的非線性,采用線性系統的控制策略不能獲得良好的性能。學者們提出了很多控制策略,比如迭代學習控制[2]、模糊神經網絡控制[3]、自適應控制[4-5]、滑模控制[6]等。這些方法有其局限性,比如模糊規則庫的建立問題、滑模控制的抖振問題、神經網絡的算法復雜性問題。這些問題限制了其應用范圍。
本文將參數的不確定性看作系統的干擾,采用非線性L2控制策略,結合LMI方法,設計了L2控制器,使圓筒型永磁直線電動機系統在存在參數不確定性的情況下,在原點平衡點漸進穩定。
1 圓筒型永磁直線電動機的數學模型
1.1 TPMLM的電流方程
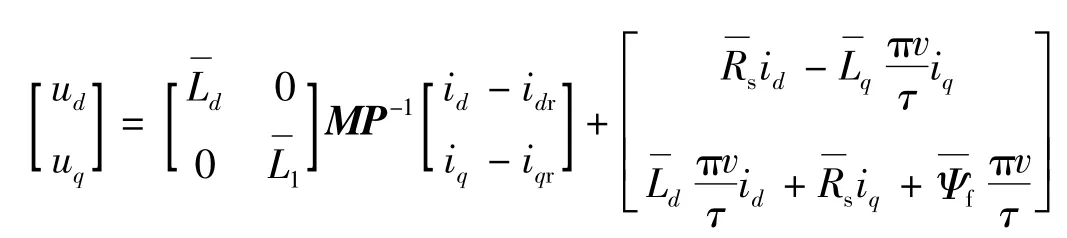
我們僅考慮基波分量,在d-q軸坐標系,圓筒型永磁直線電動機(以下簡稱TPMLM)的電流方程描述[7]:
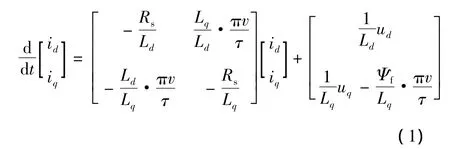
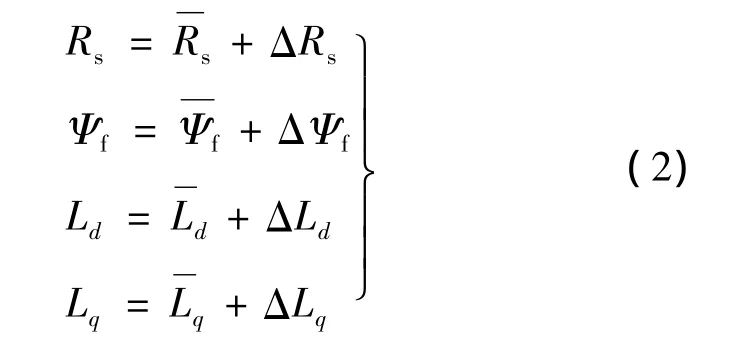
式中:id、iq為TPMLM相電流;ud、uq為TPMLM相電壓;v為動子直線速度;τ為極距;Rs、Ld、Lq、Ψf分別為相電阻、d、q軸電感、永磁體基波磁勢過動子繞組磁鏈的實際值為其標稱值,其變化量分別為ΔRs、ΔLd、ΔLq、ΔΨf,則有:
將式(2)代入式(1),并令x=[x1x2]T=[id-idriq-iqr]T,idr、iqr為d、q軸電流的參考信號。TPMLM的電流狀態方程可變成:
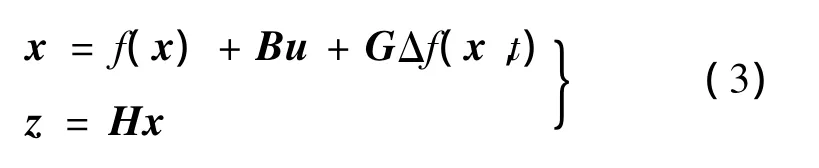
式中:f(x)為單位矩陣,z表示評價信號,H∈ Rp×2,Δf=
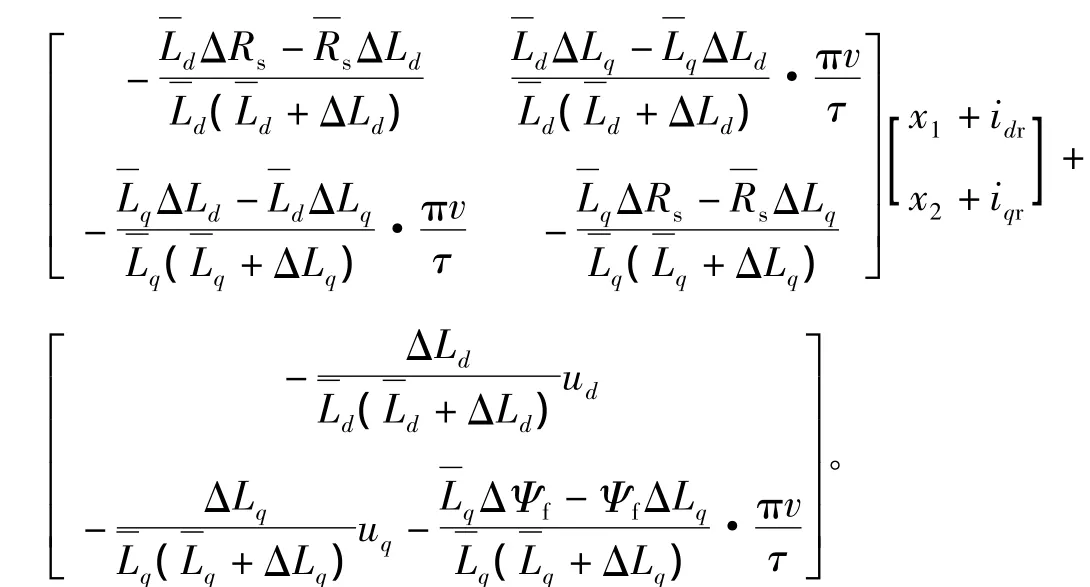
在式(3)中,Δf表示由電機參數的變化引起的系統干擾,可以看出,Δf含有電流分量,因此Δf可以表示由電機參數變化引起的干擾的量化指標。如果我們將電機參數的變化看作施加在電流控制系統上的干擾信號,將電機參數變化引起的電流變化看作干擾信號在系統輸出端的輸出量,則電機參數變化問題就變成了系統的干擾抑制問題,可以采用L2性能指標來描述此干擾信號的抑制問題。
1.2 TPMLM的動力學模型
TPMLM的動力學模型如下:
式中:Cv為粘滯摩擦系數;Fconcos(2Npz)為齒槽力;Fr為紋波推力;Fload為負載阻力;Ffsign(v)為靜摩擦力;m為動子質量;Fem為電磁推力;v為動子速度;y為動子位移。
令:F=Fem-d,d=Ffsign(v)+Fcogcos(2Npz)+Fr+Fload并對式(4)進行拉普拉斯變換,可得:
TPMLM電磁推力模型如下:

式中:Kd為推力系數;iq為q軸電流。
由上所述,TPMLM系統的模型如圖1所示。

圖1 TPMLM系統的模型
2 TPMLM電流控制系統設計
針對式(3),對TPMLM的L2控制問題可以表述如下:對于給定的正數γ,求狀態反饋控制律:

使得閉環系統滿足如下性能準則:
(1)當Δf(x,τ)=0時,閉環系統在x(0)=0處是全局漸近穩定的;
(2)對于任意給定的T>0,當x(0)=0時,不等式:

成立。
由γ耗散性與L2性能準則的關系可知,式(8)等價于以下耗散不等式:

其中:V(x)是正定的儲能函數。
由文獻[4-5]可知,如果存在半正定的儲能函數V(x),滿足如下HJI不等式:

則閉環系統具有性能準則(2)。本文以下部分將敘述如何將求解HJI問題轉化為求解LMI問題,同時使得閉環系統滿足性能準則(1)和(2)。
下面采用LMI方法設計TPMLM電流L2控制算法。
設V(x)=xTP-1x為儲能函數,其中P∈Rn×n,P=PT>0,代入式(10)左邊,得:
易知存在D∈Rn×n,HTH=DTD成立,式(11)右邊乘以P2并將HTH=DTD代入得到:

則L=P-1RP-1。由式(10)~式(12)可知,當R≤0時,?x即:

TPMLM電流閉環系統滿足性能指標(2)。
由式(13)和Shur定理可得:
當w=0時,令儲能函數V(x)=xTP-1x為其Lyapunov函數,則:

由于P>0,M<0,所以V·(x)=2xTP-1MP-1x<0,x≠0,又因為V(x)是徑向無界的,所以閉環系統在x=0處全局漸近穩定。因此TPMLM電流閉環系統具有性能準則(1)。
因此,令式(3)的控制律為u(x)=B-1[MP-1x-f(x)],TPMLM電流控制系統滿足性能準則(2);由式(14)求得P、M滿足P>0,M<0,則TPMLM電流控制系統滿足性能準則(1)。將式(3)代入可得:
M、P可由式(14)求解。
式(14)是非嚴格LMI,對于可行性問題,對應的嚴格LMI的解也包含在其解集內。因此求解非嚴格LMI的可行性問題,可求解對應的嚴格LMI的可行性問題,在大多數情況下是可行的。運用Matlab中的LMI工具箱或其他計算軟件容易求解。
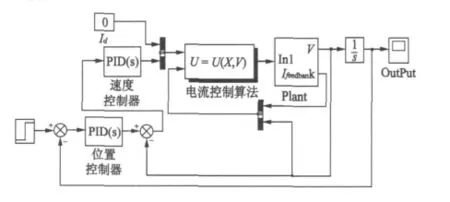
圖2 圓筒型永磁直線電動機控制系統仿真模型
3 仿真實例
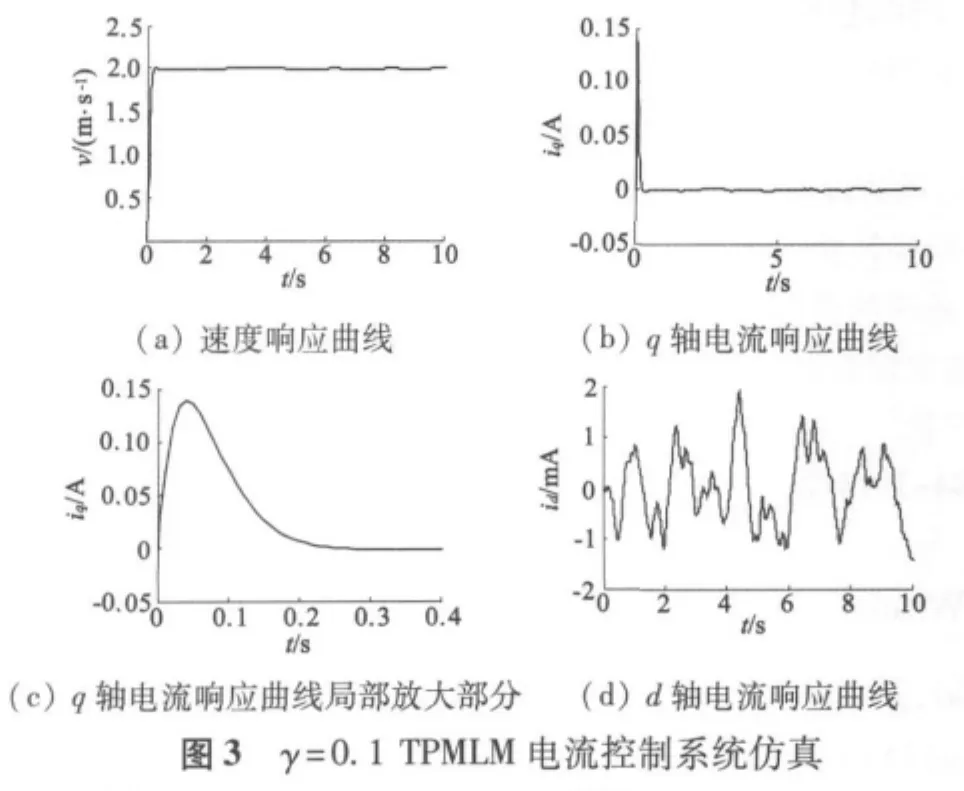
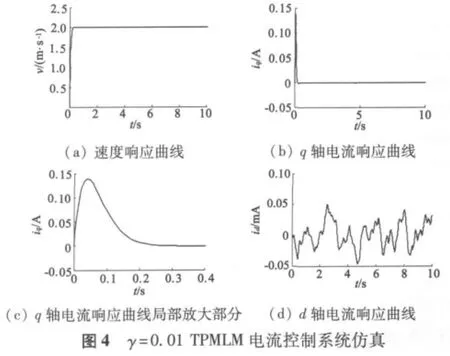
為了驗證設計的控制律,針對一臺圓筒型TPMLM控制系統進行仿真。樣機的主要參數解得由Matlab魯棒控制工具箱解式(14)得到則控制律得u=仿真時,電機參數的變化在±10%的范圍內。設置的初始狀態為[idiq]′=[0 0]′,速度設為2 m/s,d軸電流設為0。仿真模型如圖2所示。電流控制器仿真模型采用S函數編寫,速度控制器和位置控制器采用PI控制算法。本文主要設計電流控制算法,不考慮動力學模型中的干擾d,分別對γ=0.1、γ=0.01的情況下進行仿真。仿真結果如圖3和圖4所示。
仿真結果歸納如下:
(1)在干擾抑制方面,L2控制器對電機參數變化的抑制效果很好,并且γ越小,電機參數的變化對電流的影響越小。
(2)在控制系統動態性能方面,電流輸出響應速度很快,超調量很小,并且與γ的大小關系不大。
4 結 論
針對TPMLPM參數變化引起的干擾,設計了電流L2控制器。將TPMLPM的參數變化看作系統的干擾項,采用狀態空間法,在旋轉坐標系下建立包含干擾項的的TPMLPM模型,根據所建立的模型,將TPMLPM電流控制器的設計問題轉化為L2控制標準問題;最后對于L2控制標準設計問題,選取二次型函數作為HJI不等式存儲函數,采用線性矩陣不等式方法,推導出了電流控制器的解析表達式,并且證明了該閉環系統是漸進穩定的。針對由于TPMLPM系統參數變化引起的不確定性,仿真和實驗研究表明L2控制策略能夠抑制TPMLPM參數變化對電流的影響,實現了對電流的有效控制,進而實現了對電磁推力的有效控制,為圓筒型永磁直線電動機的直線運動控制創造了重要條件。
[1] 葉云岳.直線電機技術手冊[M].北京:機械工業出版社,2003.
[2] Butcher M,Karimi A.Linear Parameter-Varying Iterative Learning Control With Application to a Linear Motor System[J].IEEE/ASME transactions on mechatronics,2010,3(15):412-420.
[3] Lin F J,Shen P-H.Adaptive Fuzzy-Neural-Network Control for a DSP-Based Permanent Magnet Linear Synchronous Motor Servo Drive[J].IEEE transactions on fuzzy systems,2006,4(14):481-495.
[4] Liu T H,Lee Y C,Chang Y H.Adaptive Controller Design for a Linear Motor Control System[J].IEEE transactions on aerospace and electronic systems,2004,2(40):601-616.
[5] Su W T,Liaw C M.Adaptive Positioning Control for a LPMSM drive based on adapted inverse model and robust disturbance observer[J].IEEE Transactions on Power Electronics,2006,21(2):505-517.
[6] Francesco C,David N,Ernesto M,et al.Sliding-Mode Control With Double Boundary Layer for Robust Compensation of Payload Mass and Friction in Linear Motors[J].IEEE Transactions on Industry Applications,2009,45(5):1688-1696.
[7] 郭慶鼎,王元成,周美文,等.直線交流伺服系統的精密控制技術[M].北京:機械工業出版社,2000.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
