衛星姿軌控系統故障推演系統設計架構
2011-12-26 14:27:46董云峰
航天器工程 2011年1期
胡 迪 董云峰
(北京航空航天大學宇航學院,北京 100191)
1 引言
故障是指系統至少有一個特性參數出現較大的偏差,超出了可接受的范圍。此時系統的性能明顯低于其正常水平,已難以完成其預期的功能[1]。目前故障研究一般是針對即將發生的故障進行故障預測研究,對已發生的故障進行診斷、隔離及容錯控制研究。對已發生的故障,Ding Xiaochun 和Paul M.Frank 提出采用基于觀測器的方法對系統進行故障檢測及診斷[2-4],文獻[5]提出了基于人工免疫算法和支持向量機的故障診斷算法;針對故障預測有基于動態小波神經網絡的方法[6]等。這些算法均是采用信號處理或模式識別或殘差的方法判定故障。基于知識的算法需要采用計算機對大量的數據進行歸類分析,基于模型的方法只能對某些故障進行診斷。
對地面應用系統來說,采用計算機進行數據處理分析結合人工智能算法可對設備進行故障診斷;對于在軌運行的衛星來說,其星載計算機的計算能力有限,故障診斷算法雖簡單實用,但只能針對某些特定故障進行診斷。衛星系統高度復雜,一個故障的發生可能是由于很多因素綜合產生,因此目前的算法并不能完全勝任星上的故障診斷。Michael E.Cortese[7]提出一種實時失效管理系統,就是一種采用分布式通用模塊構成的地面系統,它是對遙測數據進行分析及監控在軌航天器,并提供航天器部件失效管理。但系統從遙測觀測到的數據十分有限,并不能完全反映出衛星各部件的狀態數據,因此如果專家僅根據少量數據來判斷部件故障,則有可能導致判斷失誤,從而造成故障進一步復雜化。
文獻[8]針對某低軌衛星進行了長達2個月的搶救,針對遙測數據與仿真結果對比分析處理,最終實現對衛星的修復與控制。但采用的仿真只是數學仿真,其故障仿真不可能覆蓋所有可能的故障情況。
綜上所述,如果能充分利用地面強大的計算能力,并能借助專家的經驗知識,同時又能對出現的各種因素進行實際推演,為專家提供決策依據,并通過推演能得到衛星操作結果,這樣可及時對衛星出現的故障進行搶修與恢復。因此,本文提出了一種可用于解決這類問題的故障推演系統架構。
2 故障推演系統方案設計
2.1 總體設計
故障推演系統根據功能需要由三部分系統組成,分別是動態模擬系統、故障動態注入系統和數據歸檔顯示及處理系統,三部分組成一個推演系統大閉環,通過建立仿真模型,按飛行工況實現閉環推演,如圖1所示。
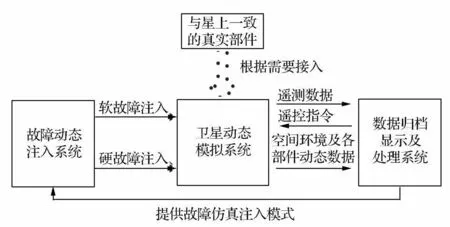
圖1 故障推演系統組成結構示意圖Fig.1 Fault demonstration system compositions
動態模擬系統由各種部件模擬器組成,解決衛星在軌的動態仿真,提供與真實衛星一致的信號接口及一致的遙測數據,這樣就能真實反映出真實衛星的運行狀態。部件模擬器可由地面商用器件組成,成本較低。
故障動態注入系統,對各模擬器實施動態數據注入,以實現對不同故障模式的仿真。根據實際的需求,可將故障注入分為軟故障注入、硬故障注入和真實部件故障注入三種方式。
數據歸檔顯示及處理系統中,實時將動態模擬系統輸出的所有動態數據,實時錄入數據庫進行數據歸檔,為數據處理提供強大的數據支持。采用三維顯示技術動態地顯示衛星在軌運行期間各部件的參數狀態。
2.2 動態模擬系統
動態模擬系統是一套針對在軌衛星的姿軌控地面模擬系統。系統由敏感器模擬器、執行機構模擬器、星載計算機模擬器、空間環境及運動學和運動學計算機(也稱實時計算機)、數據管理系統模擬器、遙測遙控系統模擬器組成。
為了達到各種故障的注入推演,動態模擬系統至少要達到信號接口一致,即所有的信號線及部件狀態與在軌衛星一致,星載計算機運行與真實衛星一致的程序,保真度達到最高。在實際提供故障診斷及策略時,可采用與在軌衛星一致的部件進行連接,這樣可以排除由于模型仿真出現的不一致,并且由于采用了與真實部件一致的接口,可以直接采用真實部件配合運動學和動力學轉臺,實現對衛星在軌運行進行最真實的仿真,達到數據的最好匹配,對故障進行精確推演。
動態模擬系統各部件模擬器采用嵌入式設計,信號接口與真實部件接口一致,信號傳輸與數據協議也與真實部件一致,只是采用模擬器來實現各種信號的產生。各模擬器的下載接口與調試接口均接入了故障動態注入系統,以便于注入各種故障模式。
根據數據處理的需求,動態模擬系統需要輸出與真實衛星一致的遙測數據,從遙測遙控模擬器通過無線接口下傳至數據歸檔系統;另一部分數據從實時計算機輸出,這部分數據真實反映了衛星經過控制后的各種狀態數據;還有一部分數據是從星載計算機模擬器、敏感器模擬器和執行機構模擬器輸出,這部分數據反映了衛星姿軌控各部件狀態最真實的數據信息,對于故障診斷非常重要。
動態模擬系統組成與結構如圖2所示,實際系統如圖3所示。
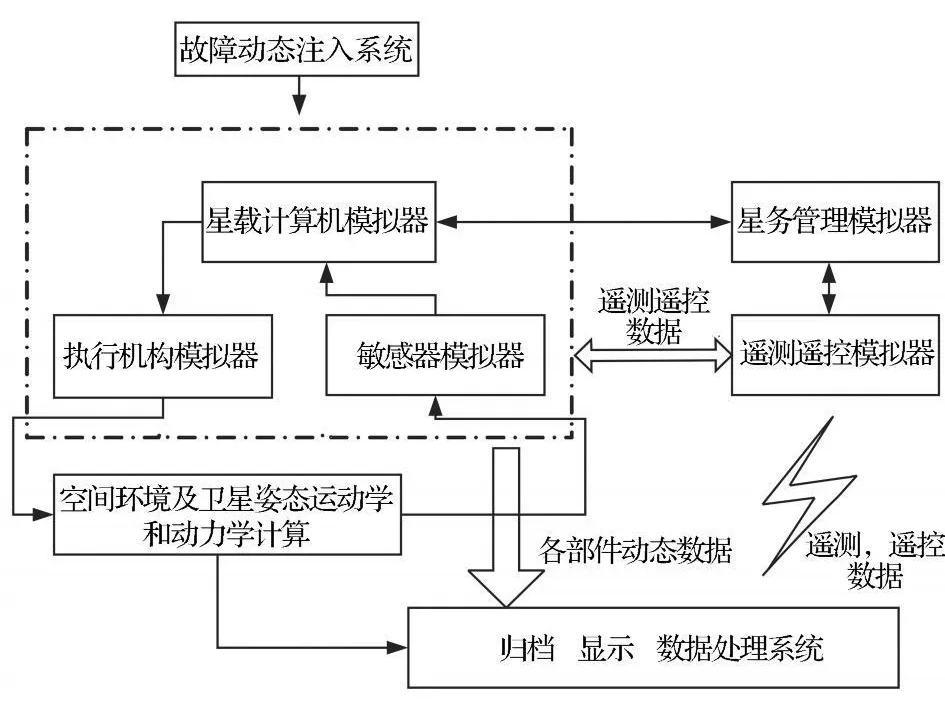
圖2 動態模擬系統組成結構示意圖Fig.2 Dynamic simulation system
2.3 故障動態注入系統
故障動態注入方式,是指在衛星動態仿真過程中,通過對處理系統生成的各種故障模式進行注入操作。由于數據處理系統分析得出的故障模式可能非常多,采用人工注入方式,工作量大,而且不能保證每次注入的故障的正確性,采用故障動態注入系統可以解決多個故障在某個時刻同時注入的問題。
圖3 實際動態模擬系統圖Fig.3 True dynamic simulation system
故障注入之前,需要對數據歸檔顯示及處理系統發送過來的故障模式進行分類處理,并根據故障模式確定故障因素編號,便于注入。文獻[9]針對直接對應于物理失效因素的故障,采用物理健康指數描述(Physical Health Index,PHI),如反作用輪的電機電流可以直接表征反作用輪電機狀態,從而可以用PHI 來描述;針對不是直接與物理因素相關的故障,采用虛擬健康指數描述(Virtual Health Index,V HI),如反作用輪的轉速并不直接與反作用輪某一組成部分直接關聯,其轉速突變并不能直接描述某一組成部分失效,因而可以用VHI 描述。根據文獻[9]的描述方法,故障動態注入系統動態地將每個故障進行PHI 和VHI 編號并進行注入。
故障動態注入系統由兩部分組成:一部分由運行在PC 機端的程序,負責對由數據處理系統發送過來的故障進行解碼,對應好故障的設置編號;另一部分是現場可編程門陣列(FPGA)邏輯處理單元,負責管理動態模擬系統眾多的FPGA接口和調試接口,如圖4所示。
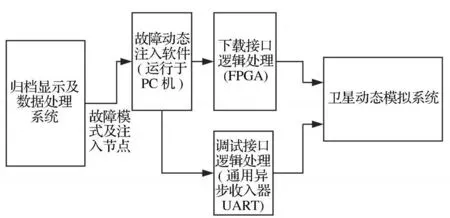
圖4 故障動態注入系統Fig.4 Dynamic Injection system
故障注入方式可以分為兩種:一種是直接通過修改源程序,產生可執行文件從JTAG(Joint Test Action Group)接口下載到相應的模擬器,然后復位這個模擬器即可;另一種是從調試口注入故障編號,通過模擬器程序識別相應的編號將故障設定好。這種方法需要在可能設置故障的地方設置好編號,可通過建立故障樹的方法對某個部件的故障進行編號,通過注入編號的方式實現故障注入。故障動態注入硬件和軟件如圖5所示。
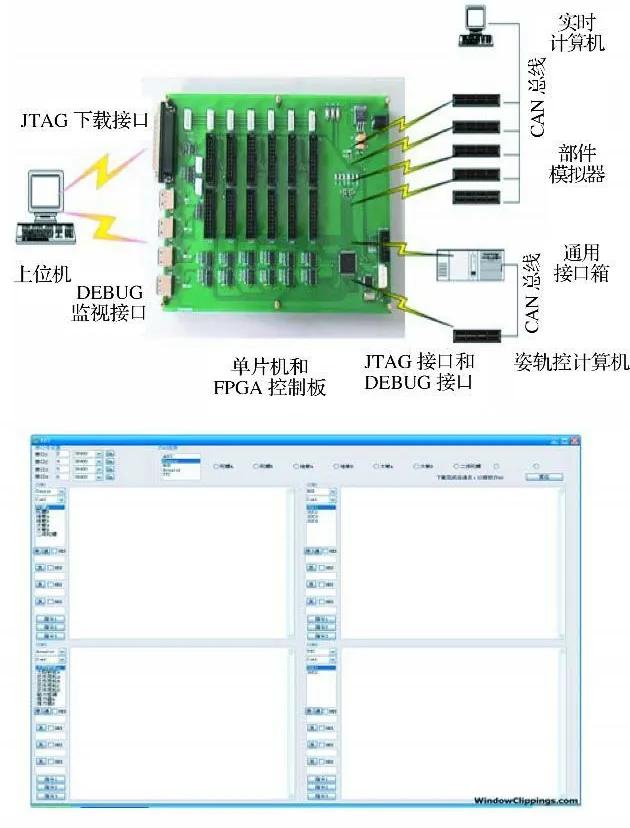
圖5 故障動態注入硬件和軟件Fig.5 Hardware and softw are of dynamic injection system
故障注入方式實現三種類型的故障注入,包括軟故障、硬故障和真實部件故障注入。
軟故障注入。即對各部件軟件進行故障注入,實現故障復現,此種注入方式采取軟件方式修改,方便易行,可重復修改,成本低。
硬故障注入。由于動態模擬系統采用與真實部件一致的信號接口,因此在確定好故障類型后,為了更加真實地反映出故障的特性,可對部件模擬器進行硬故障注入。硬故障注入方式是對部件模擬器進行物理上的改變,具有破壞性,模擬程度高,應用于那些軟故障不能模擬的特性,如某些信號斷路后,信號接口阻態為高阻態,就不能簡單地將其設置為低電平狀態。
真實部件故障注入。先采用部件模擬器仿真后,確定好故障類型及方式,將真實部件加入到動態模擬系統,在真實部件上施加故障操作進行復現衛星當前的故障狀態。這種方式是對故障有了明確的認識,破壞性最大,成本高,相似程度最高,應用于某些模擬器不能勝任的故障,如動量輪加速過程中產生作用于衛星的力矩等。
2.4 數據歸檔顯示及處理系統
數據歸檔顯示及處理系統是對仿真出現的數據進行歸檔處理,由歸檔、顯示和處理系統三部分組成。
數據歸檔系統是對由動態模擬系統輸出的眾多數據及真實衛星下傳的遙測數據進行歸檔,編入數據庫,供顯示及處理調用。
數據顯示系統分三部分:一部分用于顯示由真實衛星下傳的遙測數據,表明真實衛星當前的工作狀態;一部分用于顯示由動態模擬系統輸出的遙測數據,表明動態模擬系統當前的工作狀態;一部分用于顯示由動態模擬系統輸出的實時計算機和各部件的狀態數據,反映當前動態模擬系統運行各部件狀態數據,同時也能反映在軌運行的部件狀態,可及時觀測到注入的各故障狀態及衛星運行的結果。這部分數據及遙測遙控系統數據完成對衛星運行數據最完整的記錄,對于故障預測及診斷可以提供最完整的數據。數據處理系統采用專家系統進行推演或計算智能算法對采集到數據進行分析,提出可能的故障模式反饋給故障注入系統進行閉環仿真,通過注入仿真提供仿真結果與真實遙測數據的符合度,給出衛星操作對策,達到最優的解決方案。
數據處理系統通過對動態模擬系統的輸出數據和真實衛星的遙測數據建立相關性分析,當數據發生異常時分析可能產生的故障模式,將故障模式反饋給故障動態注入系統,產生閉環推演,達到最優的結果,保證能正確反映在軌衛星的故障狀態。
數據歸檔顯示及處理系統的組成結構如圖6所示。
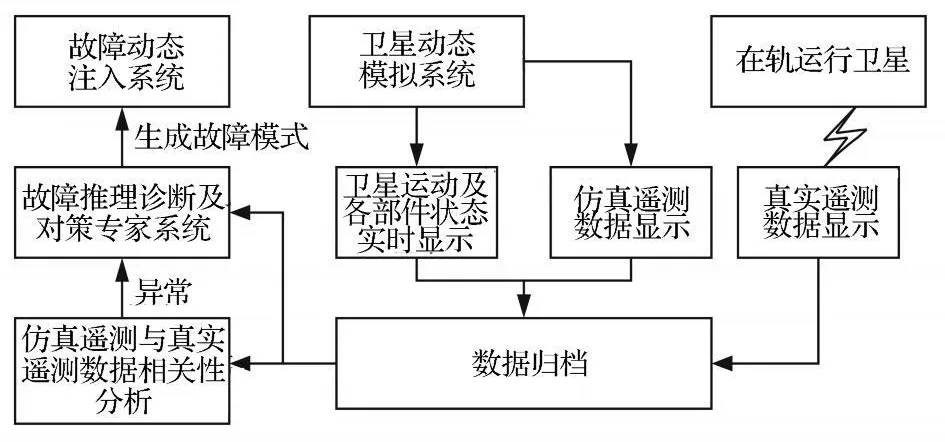
圖6 數據歸檔顯示及處理系統Fig.6 Data archive &display handling system
3 閉環推演過程
閉環推演即由故障注入系統注入故障模式,動態模擬系統進行系統仿真,進而由數據歸檔顯示及處理系統進行分析反饋給故障注入系統,達到最優結果后提交給工作人員決策。
故障推演系統的推演過程如圖7所示,由數據歸檔顯示及處理系統接收從動態模擬系統輸出的遙測數據與從真實衛星接收的遙測數據進行數據歸類處理,建立各種數據相關度函數。
數據分析推演,當發現數據異常時,及時根據動態模擬系統輸出的各種部件狀態信息進行數據分析,提出可能引起的各種故障因素進行故障推演。
軟件故障注入推演。數據歸檔顯示及處理系統生成各種故障模式提交給故障動態注入系統,由故障動態注入系統生成各模擬器可實現的軟故障信息傳至動態模擬系統。根據故障仿真結果,由數據歸檔顯示及處理系統進一步計算仿真結果與實際遙測數據的相關度,達到指標后列入可能的故障數據集。

圖7 故障推演系統推演過程Fig.7 Process of fault demonstration
硬件故障注入推演。工作人員根據軟故障推演結果決定是否進行硬故障推演,如果工作人員認為需要進行故障推演,則下達指令生成故障節點信息,由故障注入系統實施對各部件模擬器進行硬故障注入,再重復軟故障注入的過程,計算仿真結果與實際結果的相關度,并生成可能的故障數據集。
真實部件故障注入推演。由工作人員根據硬故障仿真結果決定是否進行真實部件故障注入仿真,如果需要則接入真實部件進行故障推演,達到最優結果后,工作人員根據推演指令操作及模擬結果,對真實衛星進行故障搶救,進而對比操作的結果并決定是否進行新一輪的故障推演。
故障推演系統充分利用了最先進的數據處理算法對衛星進行系統的健康管理,為決策者提供最完整的數據分析及故障控制策略,能及時發現衛星存在的問題,提高衛星的使用效率。
4 將來的工作
目前故障推演系統的總體設計已經完成,各項關鍵技術已經突破,接下來需要完成的是針對姿態軌道控制系統建立敏感器和執行機構的故障模式,并對故障模式進行特征分析,采用計算智能的方法進行分類,通過機器學習的方式對故障進行分類推演,達到系統故障推演的目的。
5 結束語
故障動態推演系統充分利用了地面強大的數據處理算法以及地面專家的經驗知識,可以實現對衛星出現異常動態的推演,獲得衛星在軌運行最完整的數據分析并進行處理,可以對衛星隱性故障進行深入分析,同時可以針對衛星在軌運行期間發現異常數據進行反復仿真驗證,對衛星的狀態進行深入分析論證。本文涉及的故障推演系統只是針對衛星姿態軌道控制分系統而產生,也可以推廣到衛星的其他分系統。
References)
[1]葉銀忠,潘日芳,蔣慰孫.動態系統的故障檢測與診斷方法[J].信息與控制,1985,15(6):27-34
[2]Ding Xiaochun,Frank P M.Fault detection via optimally robust detection filters[C]// Proceedings of the 28th Conference on Decision and Control,IEEE,1989:1767-1772
[3]Ding Xiaochun,Frank P M.Fault detection via factorization approach[C]// Proceedings of the 29th Conference on Decision and Control,IEEE,1990:3623-3628
[4]Ding Xiaochun.Survey of robust residual generation and evaluation methods in observer-based fault detection system s[J].J.Proc.Cont.1997(6):403-424
[5]Yuan Shengfa ,Chu Fulei.Fault diagnosis based on support vector machines with parameter optimisation by artificial immunisation algorithm[J].Mechanical Systems and Signal Processing ,2007,21:1318-1330
[6]Wang Peng ,George V.Fault prognostics using dynamic w avelet neural networks[J].Artificial Intelligence for Engineering Design,Analysis and Manufacturing,2001,15:349-365
[7]Michael E C.Real time failure management system[R].AIAA-89-3084-cp,1989:767-775
[8]彭仁軍,馬雪陽,鄭科宇,等.一顆低軌道衛星在軌故障搶修與恢復[J].航天器工程,2008,17(1):24-29
[9]Wang Pingfeng ,Byeng D Y.Ageneric bayesian f ramework for real-time Prognostics and H ealth Management(PHM)[C]// 50th AIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics,and M aterials Conference ,2009:1-16
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
