0603貼片電阻自動分割設備的研制
2012-01-10 03:06:00李繼生
天津科技大學學報 2012年2期
關鍵詞:設備
王 臻,李繼生
(天津科技大學電子信息與自動化學院,天津 300222)
0603貼片電阻自動分割設備的研制
王 臻,李繼生
(天津科技大學電子信息與自動化學院,天津 300222)
設計了一種用于 0603貼片電阻從板狀分割成條狀的自動分割設備.詳細闡述該分割設備主要結構的工作原理、關鍵機構的設計、控制系統和氣路的設計.該設備可將貼片電阻生產中的分割工序從手動操作變成半自動化操作,生產效率提高4倍.
貼片電阻;自動分割設備;氣動系統
貼片電阻[1](chip-resistor)又稱片式固定電阻器,是將金屬粉和玻璃鈾粉混合,采用絲網印刷法印在陶瓷基板上制成的電阻器.它的特點是體積小、重量輕、適應再流焊與波峰焊、電性能穩定、可靠性高、裝配成本低,并可與自動裝貼設備匹配(SMT/SMD設備),其常應用于自動化設備、高端計算機、通信設備及高科技多媒體電子設備上.貼片電阻按照結構可以分為:一般貼片電阻、陣列貼片電阻、網絡貼片電阻等;按照尺寸可以分為:0402、0603、1005、1608、2012、3216、6432 等[2].
不同類型電阻的生產工藝[3]不同.通常,貼片電阻的第一次分割是將電阻沿沖壓(或激光切割)的分割線由板狀分割成條狀,然后進行側面電極的印刷(或真空噴濺)[4].第一次分割工序的成品率對整個生產工序的成品率影響很大,是貼片電阻加工制作中的一個非常關鍵的過程.
目前,貼片電阻的第一次分割主要采用皮帶分割方式,即以偏心分割輪對基板的壓力作為分割力,以皮帶為介質進行分割,能夠實現連續分割,效率高且穩定.但是這種分割方式只能適用于 1005以上尺寸的貼片電阻.對于 0603型電阻,因為其基板較薄(0.2,mm 左右),對壓力敏感,皮帶分割壓力不均、厚度不均或者電阻基板分割線與分割輪中心線平行度小于 0.1,mm 時,會造成基板破碎.國內外貼片電阻生產廠家大多采用手動夾具分割的方式進行0603型貼片電阻的分割,即操作人員將單枚基板插入夾具的分割槽中,用手來控制基板插入槽中的垂直度與壓力,通過繞該槽的旋轉實現對基板的分割.這種方式能夠較好地控制壓力及分割線與分割夾具接觸面的平行度.但該種方式的生產效率低下、勞動強度大,不適合工業化生產.
參考手動分割電阻基板的動作,本文設計了一種專門用于分割 0603型貼片電阻的分割設備,用旋轉機構實現人工分割基板的動作,并且能夠自動供給基板和收集條狀電阻.
1 總體結構設計
0603型電阻的基板為沖壓基板,即印刷前基板已存在分割線,印刷后厚度(0.23±0.05),mm.利用分割設備模仿人工分割貼片電阻基板的方式,能夠實現電阻基板的自動供料以及分割后的自動收集,能夠自動且高精度、高效率、穩定的將電阻基板分割.電阻分割設備主要包括供料、定位、分割和收集4個機構,如圖 1所示.供料機構將層疊排列的經過印刷與激光調阻的基板逐一通過 z軸、x軸的傳送機構,按照工序傳送至分割機構的導向軌道上,并在中間位置進行基板位置的校正.定位機構將供料機構傳送的基板進行位置校正,確保其以正確的姿態放入分割機構的導向軌道.分割機構將基板通過與分割線重合的旋轉軸的正反向旋轉,在分割輪的槽中分割為條狀,并通過分割輪的定位旋轉將條狀電阻傳送至收集機構.收集機構將條狀電阻從分割輪槽中取出,依次放入指定的夾具中,并能夠自動更換夾具.
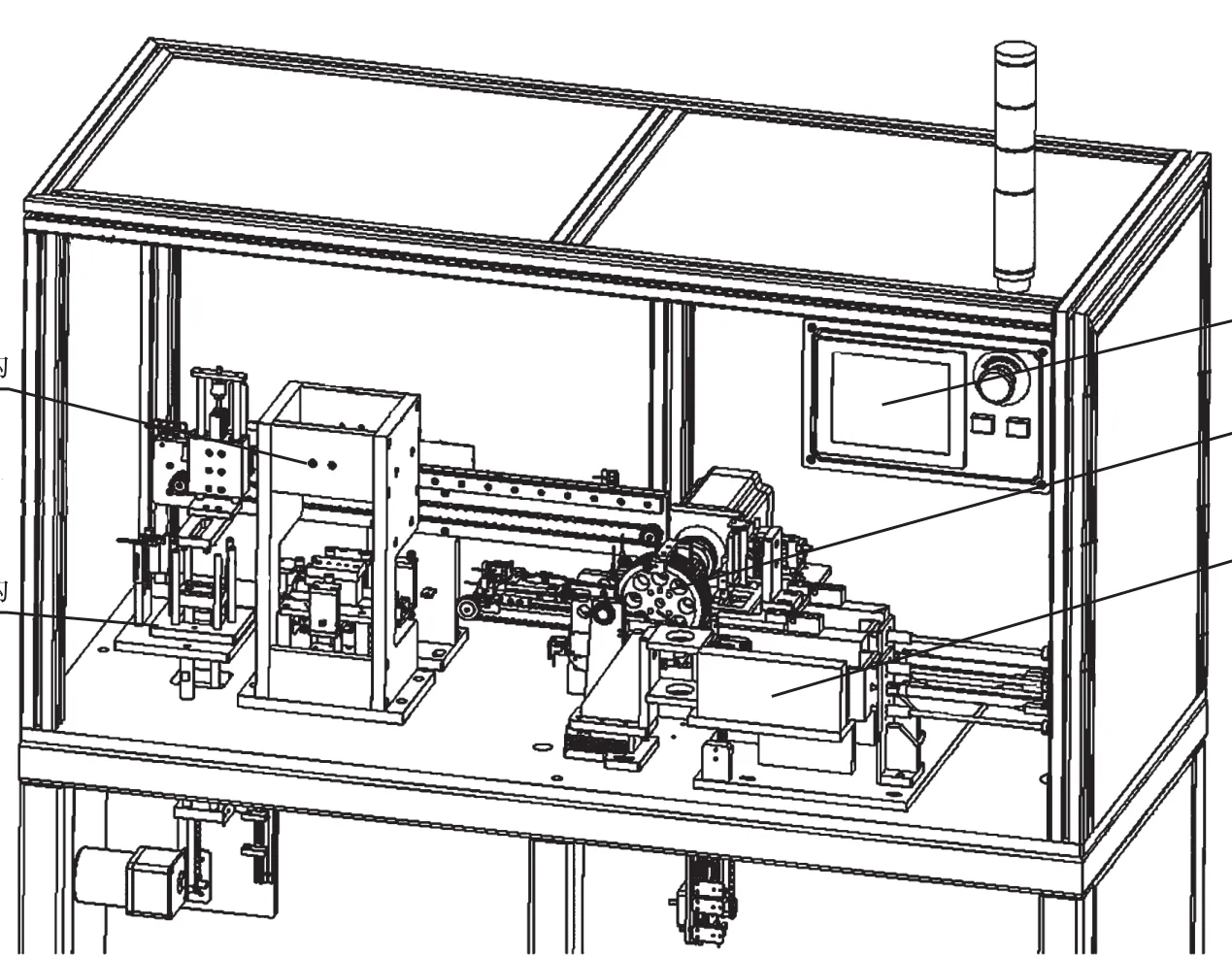
圖1 設備整體結構圖Fig.1 Main structure drawing of the machine
2 機械結構設計
2.1 供料和定位機構
供料和定位機構如圖 2所示.一個單位的基板層疊排列,手動放入供料機構中由6根圓柱導桿限位的滑塊3上,用交流電機1驅動同步齒形帶2的z軸運動機構,帶動基板從原點向上運動,當最上層的基板到達由光纖傳感器 4確定基板最上層的位置后停止;然后,由步進電機帶動同步齒形帶的 x軸運動機構,通過精密直線導軌滑塊固定的微型吸盤機構 5,汽缸 6下壓真空開啟吸起最上層的基板,z軸下降并從側面向吸起的基板吹氣,保證只能吸起一張基板,x軸運動將基板傳送至校正機構.
定位機構是用 3個微型導軌帶動的夾緊軸承 7與 2個精密定位的軸承共同組成的平面夾緊定位機構,驅動結構采用直線薄型汽缸 8帶動錐形輪,汽缸桿伸出時,錐形輪推動 3個微型導軌向外運動,留出基板放置空間.基板放入校正機構時,汽缸桿收回,3個微型導軌上的滑塊依靠彈簧的彈力復位,使得3個夾緊軸承夾緊基盤,實現基板的定位.
2.2 分割機構
分割機構如圖 3所示.基板推進電機 1帶動同步齒形帶,驅動基板夾緊機構 4夾住并帶動基板,沿著基板導向軌道 5,向有 100個槽的分割輪 7運動.分割輪在原點位置時,基板可以插入分割輪的槽中,而且第一條分割線與分割輪的槽外邊相切.通過傳感器確認基板進入分割槽后,推進電機 1停止,基板對分割輪的槽底部的壓力由調壓彈簧3調節.
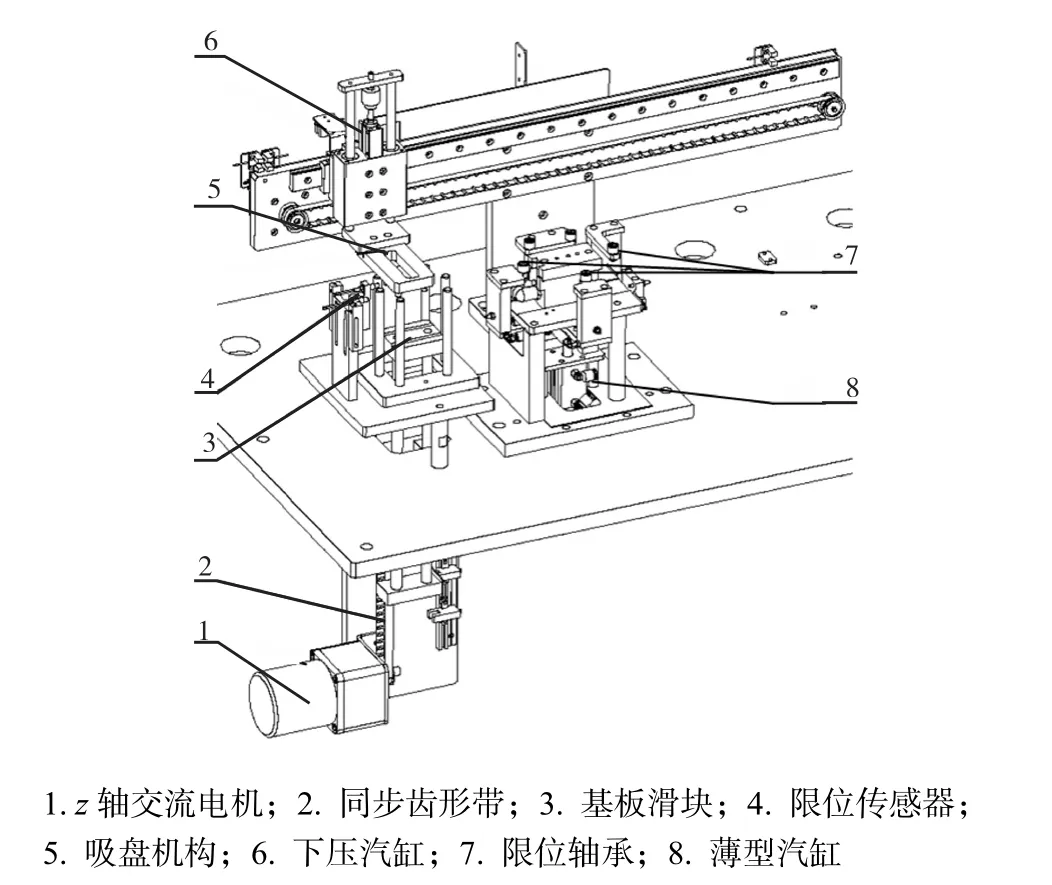
圖2 供料和定位機構Fig.2 Feeding mechanism and location mechanism
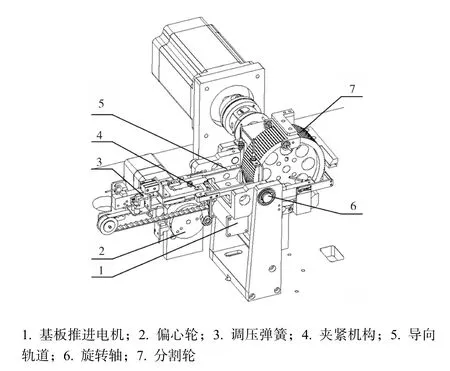
圖3 分割機構Fig.3 Breaking mechanism
基板進入分割輪的槽后,偏心輪電機帶動偏心輪2旋轉 360°,同時,連接在偏心輪上的連桿帶動基板導向軌道5及基板夾緊機構4分別繞分割軸6正反向旋轉,實現對基板沿第一條分割線的折斷.連桿的兩側分別為左右螺旋的外螺紋,通過連桿的旋轉,可以調節分割的角度.基板折斷后,夾緊機構后退,分割輪逆時針旋轉3.6°,分割輪的下一個槽旋轉至分割位置,基板推進電機 1再次將基板插入分割槽中,開始第二條電阻的分割.而已經分割為條狀的電阻沿分割輪的限位環旋轉,逐一旋轉至收集工位.如此反復運動既能實現基板的逐條分割,也實現了條狀電阻向收集機構的傳送.
分割機構是設備的核心機構,機構中旋轉軸與當前分割槽的平行度、軌道與分割槽的平行度、基板插入分割槽的壓力及基板旋轉的角度,對基板的分割效果影響較大,如以上形位公差無法保證,會導致基板的破碎.在設計過程中充分考慮關鍵零件的公差設計和累計公差的計算與分析,調試過程中利用 DOE實驗方法[3]得出最佳工作條件:旋轉分割的最佳角度為 105°,分割輪旋轉定位精度為±0.1°,分割輪分割槽分度累計誤差為±0.1°/360°,基板對分割槽的壓力為0.075,MPa,每次分割旋轉時間控制在0.63,s,旋轉軸與分割槽的平行度需控制在0.15,mm以內.
2.3 收集機構
收集機構如圖4所示,由2個氣動滑臺組成x、z軸方向的機器手,將條狀電阻從分割輪的槽中取出,并通過真空針管 1將其吸取、壓入夾具中;夾具通過4、5兩個由快速排氣閥控制的汽缸張緊定位,由氣動滑臺 6、8的平移實現夾具的定位和自動更換.條狀電阻在夾具中隨支撐板7步進向下運動,步進電機帶動同步齒形帶實現支撐板隨真空針管 1壓入動作的向下緩沖和向上定位,確保條狀電阻被壓入及下降過程中不會受力破損.
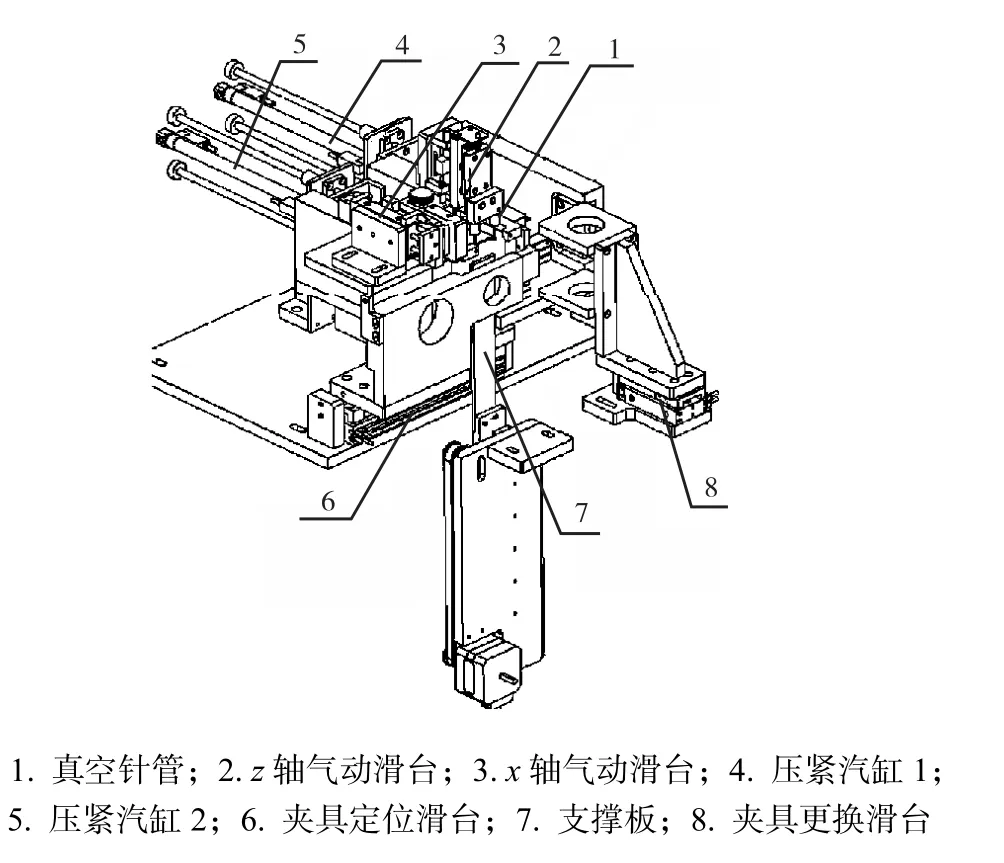
圖4 收集機構Fig.4 Accumulate mechanism
2.4 驅動機構選型
根據驅動機構的方式和要求的精度,合理地選擇電機和氣缸,在能夠實現精度和速度要求的前提下,控制設備的開發成本.需要精密控制位置且可以停止在多個位置的驅動機構,比如分割機構的基板推動電機,選用五相步進電動機及同步帶傳動的驅動方式.需要快速往復運動的驅動機構,比如收集機構中x、y軸方向的機械手,選擇精密氣動滑臺驅動方式.
3 控制系統和氣路設計
本設備采用 PLC、繼電器共同控制,其電氣控制原理如圖 5所示.根據選用的驅動電機及汽缸的特點,選用三菱的Q系列PLC控制系統及位置控制模塊.在控制系統設計中充分考慮了各驅動機構的運動方式、時間及相互的運動配合,合理編制程序,并使用三菱GT11系列觸摸屏作為人機交互界面.設備的參數設置,如電機的速度、定位位置等的設定均可以在觸摸屏上完成.將設備的各種故障報警原因及處理方式等編制在觸摸屏程序中,使得設備操作人員能夠自主處理設備的報警停機.
本設備中很多機械動作均由氣動系統[4]實現,如基盤的吸取、定位、夾緊,基盤定位的真空系統,條狀電阻的吸取、壓入動作,均由各種汽缸及真空發生器完成.在氣動系統設計中,根據各機構的動作頻繁程度,計算整個系統和各動作組的耗氣量,合理分組,使氣動系統各組動作基本均衡,減少耗氣量,降低系統的容量要求.設備的主氣壓為 0.5,MPa,真空負壓0.1,MPa.主氣路原理如圖6所示.
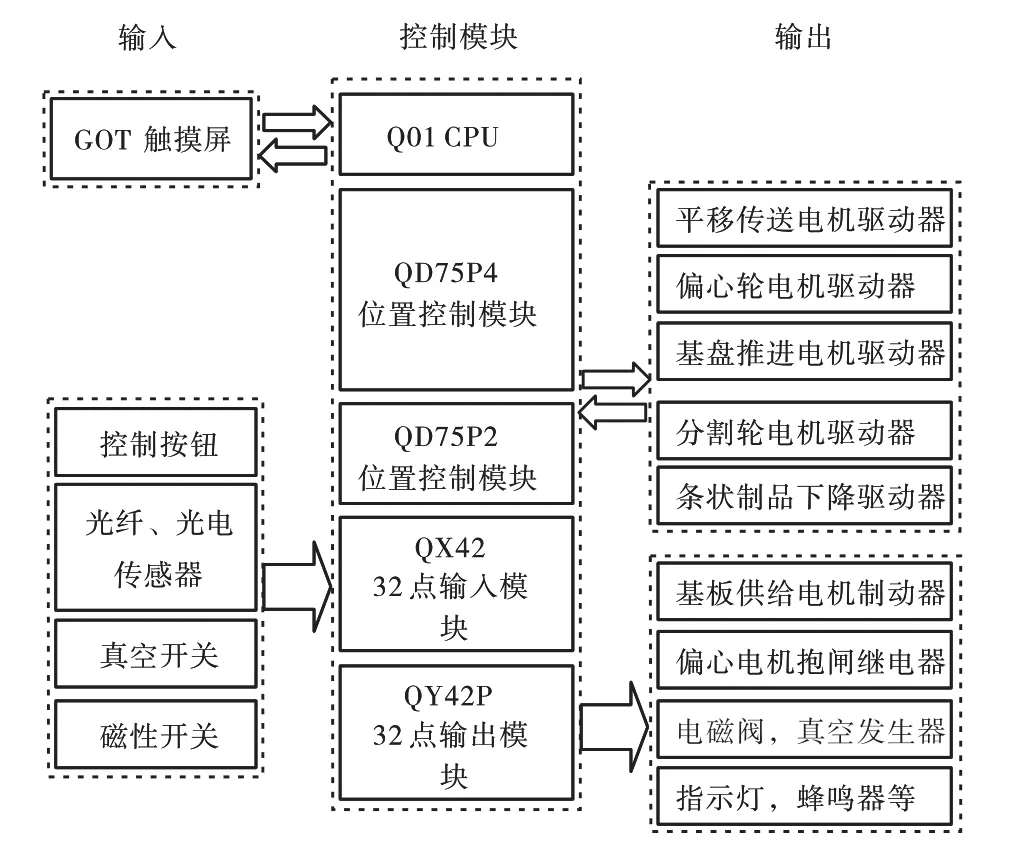
圖5 電氣控制原理圖Fig.5 Diagram of the electrical apparatus control

圖6 設備主氣路圖Fig.6 Diagram of the main pneumatic control
4 結 語
本文設計了一種用于 0603貼片電阻從板狀分割成條狀的自動分割設備,詳細闡述了該設備的機械結構、電路控制系統和氣路設計.該設備實現了0603型電阻基板的分割,并且能夠自動供給基板和收集條狀電阻.該設備已經投入實際生產,生產效率相對于人工生產方式提高4倍,成品率達到96%,以上.
[1]徐克振. 我國片式電阻器產業的發展[J]. 中國電子商情:基礎電子,2005(10):36–39.
[2]鮮飛. 貼片電阻阻值大小識別[J]. 單片機制作,2008(3):29.
[3]高艷茹,孟曉玲. 片式電阻的性能及應用[J]. 印制電路信息,2004(8):66–68.
[4]張勇,李金海. 貼片電阻排條機氣動系統[J]. 液壓氣動與密封,2006(5):57–58.
[5]任凱,王軍杰,吳德宏. 基于 DOE技術的微型汽車前輪定位參數設計[J]. 中國機械工程,2010,21(3):368–372.
Development of the Automatic Termination Machine for the 0603 Chip-Resistor
WANG Zhen,LI Jisheng
(College of Electronic Information and Automation,Tianjin University of Science & Technology,Tianjin 300222,China)
An automatic machine used in the termination progress of the 0603 chip-resistor was designed. The main mechanical process,the design of the key structure of the termination machine,and the design of the electronic and pneumatic system were discussed in details . The equipment can change the manual process into a semi-automatic one,and the production efficiency can be increased 4 times.
chip-resistor;automatic termination machine;pneumatic system
TH138
A
1672-6510(2012)02-0057-04
2011–08–25;
2011–12–31
王 臻(1986—),男,新疆人,碩士研究生;通信作者:李繼生,教授,lijish@tust.edu.cn.
常濤
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代工人(2020年13期)2020-09-27 23:04:20
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(2017年11期)2017-12-20 08:10:57
工業設計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(2015年1期)2015-04-17 03:25:28
設備管理與維修(2015年12期)2015-04-09 06:57:00