一種改進的反艦導彈前置點射擊方式目標捕捉概率算法
2012-03-24 13:44:14高曉冬王光輝李傳順
海軍航空大學學報 2012年2期
高曉冬,王光輝,李傳順
(1.海軍裝備部兵器部,北京 100841;2.海軍航空工程學院指揮系,山東 煙臺 264001)
隨著反艦導彈射程的增加,在導彈飛向目標的過程中,如果中途沒有對彈道誤差進行修正,其彈道誤差隨射程的增加將大幅度增大;而反艦導彈打擊的目標又是水面機動目標,這就要求反艦導彈必須在較大區域內搜索目標。因此,反艦導彈的尋的方式通常采用主動雷達或以主動雷達為主的復合尋的方式,其他尋的方式(比如紅外)通常是在雷達被干擾或在末制導雷達無法識別真假目標時采用。因而反艦導彈捕捉目標的問題,實際上是末制導雷達能否捕捉目標的問題。
反艦導彈的射擊方式主要分3種,分別是前置點、現在點和方位射擊[1]。
前置點射擊方式是基本的射擊方式。該方式認為在從發射導彈到末制導雷達開機這段時間(稱為自控飛行時間)內,目標的航向航速保持不變。現在點射擊方式認為目標的航向航速無法預測,所以假設目標的運動速度為0;方位射擊方式是僅有目標方位的一種射擊方式[2-5]。
反艦導彈前置點射擊方式目標捕捉概率的算法是其他射擊方式算法的基礎,雖然很多文獻研究反艦導彈目標捕捉概率[6-13],但他們均把反艦導彈自控終點位置作為自控終點有效散布區的中心來處理,這與實際不符。為此,本文在深入研究反艦導彈搜索區和捕捉目標原理的基礎上,對前置點射擊方式目標捕捉概率算法進行了改進。
1 反艦導彈自控終點的有效落點區
反艦導彈的飛行彈道一般分為自控段和自導段。在自控段,反艦導彈根據發射前裝定的射擊諸元或航路點飛行;在自導段,末制導雷達開機搜索目標。因此,末制導雷達開機位置是分析反艦導彈自控終點有效落點區的一個基準點。
根據射擊方程,反艦導彈末制導雷達開機時刻,導彈與目標的距離正好是末制導雷達的自導距離,且目標在導彈的正前方[14-15],如圖1所示。
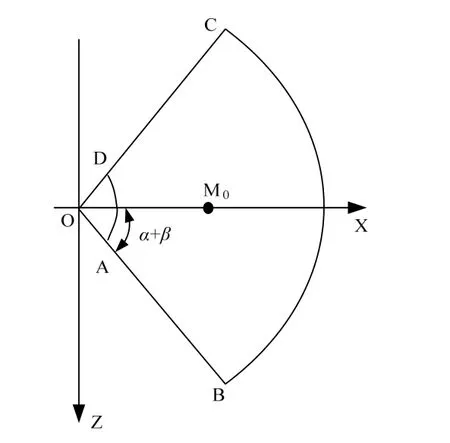
圖1 導彈與目標的相對位置
圖1中:O為末制導雷達開機時刻導彈的理論位置;OX為導彈的理論飛行方向;扇形ABCD是末制導雷達的搜索區;O A=OD=rd1為搜索區近界;OB=OC=rd2為搜索區遠界;α+β是末制導雷達的航向搜索范圍,α為末制導雷達進行航向搜索半寬,β為末制導雷達波束半寬。顯然,末制導雷達在O點開機,且目標在ABCD 內,目標肯定被捕捉。
因為前置點射擊方式假設目標的預測位置是準確的,即認為末制導雷達開機時刻,目標就在M0。因此,影響目標捕捉概率的因素主要是反艦導彈自控終點的散布。反艦導彈自控終點的散布受環境因素(風速、風向、溫度)、導彈自身因素(彈體的不對稱、射擊諸元的誤差等)等多種因素的影響,其散布一般認為服從正態分布[6]。所以,反艦導彈捕捉目標概率的計算問題,實際上轉化為反艦導彈自控終點散布在有效落點區內的計算問題。
如果反艦導彈末制導雷達在C′點開機,如圖2所示,目標正好在末制導雷達搜索區域(圖2中的雙點畫線)的右前角。
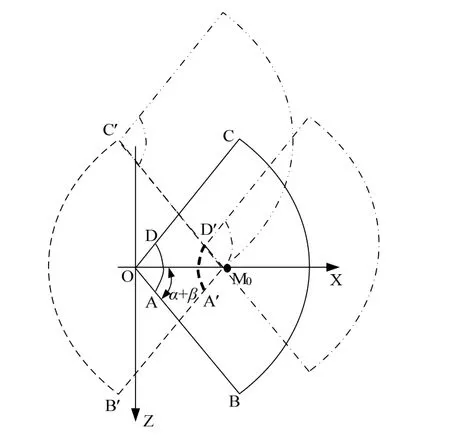
圖2 反艦導彈自控終點有效落點區
C′點的坐標為:

若反艦導彈末制導雷達在D′點開機,目標正好在末制導雷達搜索區域(圖2中的點畫線)的右后角,D′點的坐標為:

顯然,反艦導彈自控終點線段C′D′和X軸之間時,目標在末制導雷達的搜索區內;反艦導彈自控終點在線段C′D′外側時,目標不在末制導雷達的搜索區內。同理,反艦導彈自控終點線段A′B′和X軸之間時,目標在末制導雷達的搜索區內;反艦導彈自控終點在線段A′B′外側時,目標不在末制導雷達的搜索區內。A′和B′的坐標為:
經過上述分析可以看出,四邊形A′B′C′D′是反艦導彈自控終點的有效落點區,只要反艦導彈自控終點落入A′B′C′D′內,目標肯定被捕捉。
2 目標捕捉概率算法
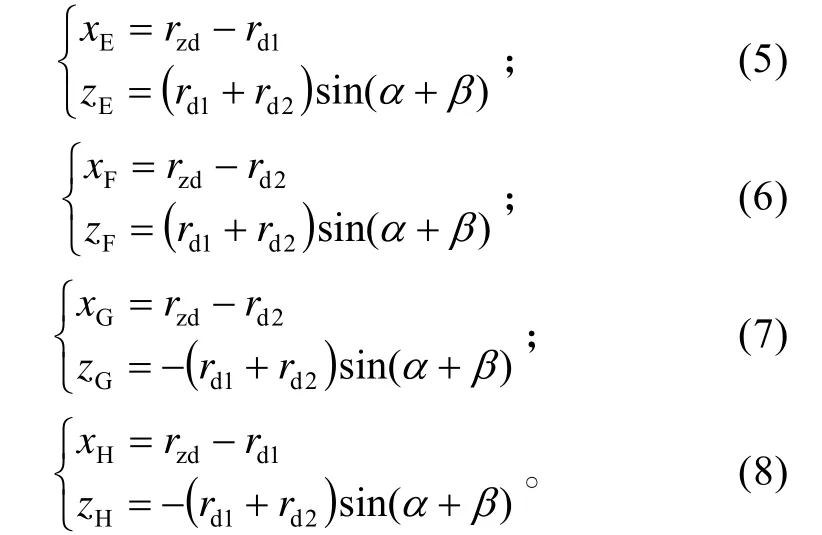
為便于直接用拉普拉斯(Laplace)公式計算目標捕捉概率,通常將圖2中的A′B′C′D′簡化為長方形EFGH,如圖3所示。
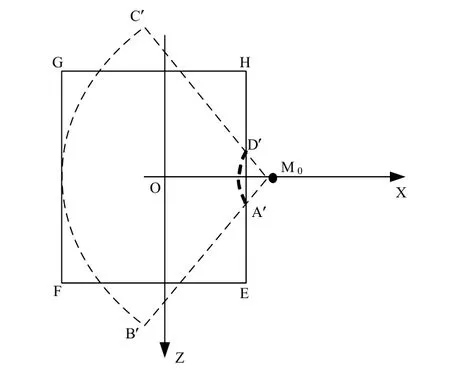
圖3 簡化的反艦導彈自控終點有效落點區
一般把EFGH的中心作為導彈自控終點的散布中心[6-11],這與實際不符,導彈的實際散布中心是O點,為使長方形EFGH 能覆蓋反艦導彈有效落點區域,E、F、G、H 各點的坐標取為:
反艦導彈有效落點區域各點的坐標確定后,即可用求得導彈在縱向上落入EF的概率為:

考慮到導彈邊飛行邊搜索的運動,式(9)改為:

式中,K為末制導雷達搜索過程中導彈向前飛行的距離。
導彈自控終點側向上落入EH之間的概率為:

如果反艦導彈自控終點在縱向上落入EF,且在側向上落入EH,則目標被捕捉。所以,末制導雷達捕捉目標的概率為

3 仿真分析
假設參數:α+β=30°,rd1=5 km,rd2=25 km,仿真結果見表1、2。

表1 原算法的仿真結果
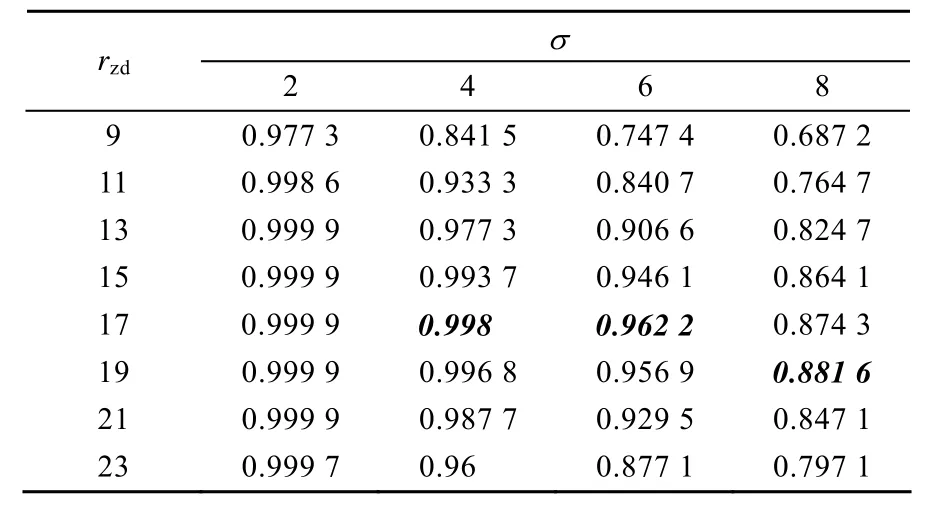
表2 新算法的仿真結果
從仿真看出,當自控終點散布較小時,新算法優勢不明顯;當自控終點散布較大時,新算法的優勢顯著,可通過選擇恰當的自導距離,提高末制導雷達目標捕捉概率。表2中的粗斜體結果對應的自導距離,即為該條件下末制導雷達的最優自導距離。
4 結論
因為末制導雷達的自導距離可根據目標數據誤差的大小進行調整,所以,相對于原算法,改進的基于前置點的反艦導彈末制導雷達捕捉目標的算法更合理、適應性更強。
[1]丁寶榮,胡海.反艦導彈攻擊方式研究[J].飛航導彈,2005(12)∶23-25.
[2]陳超,沙基昌,毛赤龍,等.雙艦無源定位捕捉概率模型及仿真研究[J].系統工程與電子技術,2007,29(4)∶622-625.
[3]曠志高,劉鼎臣.反艦導彈純方位發射捕捉概率計算方法[J].火力與指揮控制,2003,28(5)∶109-112.
[4]LU FA-XING,WU LING,DONG YIN-WEN.Blind launch of anti-ship missiles without route-planning capability[J].Systems Engineering and Electronics,2009,31(11)∶2658-2662.
[5]盧友興,吳玲,董銀文.帶航路規劃的反艦導彈盲目射擊攻擊模型及性能研究[J].電子學報,2009,37(9)∶1956-1960.
[6]紀永清,紀軍,沈培志,等.海軍兵種武器系統作戰效能評估[M].北京∶海潮出版社,2009∶33-37.
[7]王光輝,王瑞琪.超視距反艦導彈命中概率分析[J].彈箭與制導學報,2008,28(2)∶33-38.
[8]陳超,沙基昌,余濱.反艦導彈兩種射擊方式下捕捉概率及仿真[J].火力與指揮控制,2007,32(6)∶44-47.
[9]王光輝,楊根源,嚴建鋼.可變搜索區末制導雷達捕捉模型[J].火力與指揮控制,2005,30(4)∶32-37.
[10]王林,李守秀.反艦導彈末制導雷達捕捉概率的分析計算方法研究[J].戰術導彈技術,2007(3)∶12-15.
[11]吳立杰,顏仲新,劉鼎臣.反艦導彈擴展選擇圖搜捕方式探討制[J].制導與引信,2003,24(2)∶22-26.
[12]王瑞琪,王光輝.目標機動對反艦導彈捕捉概率的影響[J].海軍航空工程學院學報,2007,22(5)∶581-583.
[13]王光輝,宋艷波,王偉亞.基于目標距離的末制導雷達最優搜索圖模型研究[J].航空學報,2010,31(3)∶620-625.
[14]范洪達,李向民,朱德明,等.導彈火控系統分析與設計[M].北京∶海潮出版社,1993∶48-49.
[15]趙建軍,王光輝.反艦導彈自控終點誤差散布及其改進[J].火力與指揮控制,2003,28(5)∶12-13.
[16]劉治學,朱壽雷,許誠,等.智能反艦導彈攻防作戰的Petri網模型描述[J].海軍航空工程學院學報,2010,25(2)∶215-219.
[6]TAN H C,ZHANG Y J.Computing Eigenface from Edge Images for Face Recognition Based on Hausdorff Distance[C]//Proceedings of IEEE International Conference on Image and Graphics.2007:639-644.
[7]PAUMARD J,AUBOURG E.Adjusting astronomical images using a censored Hausdorff distance[C]//Proceedings of IEEE International Conference on Image Processing.1997:232-235.
[8]HAN I,YUN I D,LEE S U.Model-based object recognition using the Hausdorff distance with explicit pairing[C]//Proceedings of IEEE International Conference on Image Processing.1999:83-87.
[9]RUCKLIDGE W J.Locating objects using the Hausdorff distance.In:Proceedings of IEEE International Conference on Computer Vision.1995:457-464.
[10]KWON O K,SIM D G,PARK R H.New Hausdorff distances based on robust statistics for comparing images[C]//Proceedings of IEEE International Conference on Image Processing.1996:21-24.
[11]HUTTENLOCHER D P,LILIEN R H,OLSON C F.View-based recognition using an eigenspace approximation to the Hausdorff measure[J].IEEE Transactions on Pattern Analysis and Machine.1999,21(9):951-955.
[12]ZHANG Z,HUANG S,SHI Z.A fast strategy for image matching using Hausdorff distance[C]//Proceedings of IEEE International Conference on Robotics,Intelligent Systems and Signal Processing.2003:915-919.
