搜救螞蟻機器人設計
2012-04-20 09:31:08孫世成毛麗民張笠君許震
常熟理工學院學報 2012年4期
孫世成,毛麗民,張笠君,許震
(常熟理工學院電氣與自動化工程學院,江蘇常熟 215500)
搜救螞蟻機器人設計
孫世成,毛麗民,張笠君,許震
(常熟理工學院電氣與自動化工程學院,江蘇常熟 215500)
針對目前的搜索機器人體積龐大,無法進入狹小空間內搜尋幸存者,而且搜索到幸存者所花的時間比較長等缺點,提出了一種以MSP430F2234單片機為控制核心的螞蟻機器人設計方案,螞蟻機器人搜索相互獨立,采用紅外傳感器相互通訊.與通常的搜索機器人相比,螞蟻機器人功耗低、體積小,能快速、準確地搜索到目標.
搜救;螞蟻機器人;MSP430F2234單片機
地震、火災、礦難等災難發生后,在廢墟中搜尋幸存者,給予必要的醫療救助,并盡快救出被困者是救援人員面臨的緊迫任務.由于災難現場情況復雜,救援人員在存在有害物、煙霧、灰塵和一氧化碳等危險的情況下是很難進入現場開展救援工作的,此外,廢墟中形成的狹小空間使搜救人員甚至搜救犬也無法進入[1].
近十年來,尤其是“911”事件之后,美國、日本等發達國家在地震、火災等救援機器人的研究方面做了大量的工作,研究出了各種可用于災難現場救援的機器人.輪履式機器人是一種最常見的,在傳統的輪式移動機器人的基礎上發展起來的搜救機器人,但由于體積普遍偏大,不太適合在倒塌的建筑物廢墟中狹小空間內搜尋幸存者.而且現有的搜救機器人,是獨自的搜索幸存者,機器人相互之間沒有通信,搜索速度比較慢,搜索到幸存者所花的時間比較長[2].
1 設計原理
在搜索的過程中,通過紅外相互通信,了解彼此狀態.當一個螞蟻搜救機器人找到幸存者后,該螞蟻搜救機器人就會通過紅外信息通知其他螞蟻機器人,其他螞蟻機器人收到信息后,向其靠攏,并發出報警聲.螞蟻搜救機器人通過相互協作,實現在復雜情況下快速、準確的搜索到幸存者.當螞蟻搜救機器人在搜索過程中遇到障礙物,觸角開關就會被觸動,螞蟻搜救機器人就會轉向.
2 硬件電路設計
本設計基于MSP430微處理器,構建了具有目標搜尋與檢測功能的螞蟻機器人.螞蟻機器人系統的組成主要包括微處理器部分、電源供電部分、電機控制部分、目標搜尋與檢測部分、通訊部分等,如圖1所示.
2.1 微處理器
本設計采用了MSP430F2xx系列中的MSP430F2234.MSP430F2234具有16位控制器、8 KB閃存、512 B RAM,其電源電壓采用1.8~3.6 V,待機電流小于1 μA,在RAM數據保持方式時耗電僅0.1 μA,在活動模式時耗電250 μA,I/O輸入端口的漏電流最大為50 μA;強大的處理能力,內部采用目前最流行的、頗受學術界好評的經典指令集結構,內部集成了豐富的片上外圍模塊,包括12位ADC、DAC、比較器、LCD驅動器、電源電壓監控、串行通訊、紅外線控制器、DMA控制器等[3].
2.2 電源模塊設計
如圖2所示,本電路主要通過穩壓管MCP1702給單片機MSP430提供一個穩定的電壓.穩壓管MCP1702的3引腳輸入電壓范圍為2.7 V~13.2 V,2引腳輸出電壓為3.3 V.B+和B-兩端分別連接320 mA鋰電池的正負端.開關SSSS210810控制螞蟻機器人的啟動和停止.圖中的電容均用來濾波,100 μF的電容用來過濾高頻波,4.7 μF的電容用來過濾低頻波.
2.3 電機驅動電路
采用六個場效應管來控制兩個電機.如圖3所示,信號端M1、M2、MP、MN由單片機MSP430控制,連接具有10 K上拉電阻的Vbatt處,因為單片機MSP430是由3.3 V的穩壓管供電,而Vbatt處的電壓為鋰電源的兩端電壓高至4.2 V.
當M1為低電平MN、MP為高電平時,Q1P與Q2N導通,電機1正轉.電機狀態編碼如表1所示.
2.4 電池充電模塊
電子設備電源部分是整個系統的基礎,這部分的穩定工作對整個主控板的穩定工作起著至關重要的作用.
本設計采用MCP73833高級線性電池管理控制器,用于給鋰電池充電,詳細說明如下:
(1)電池管理輸入電壓VDD是MCP73833/4器件的輸入電源,接5 v至6 V的外部恒流電源.
(2)通過在PROG引腳和GND之間的電阻來控制充電電流的大小.編程電阻和充電電流可以通過(1)式計算,其中IREG為充電電流,RPROG為PROG引腳和VSS之間的電阻.

圖1 螞蟻機器人示意圖
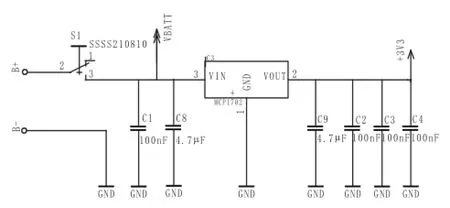
圖2 電源模塊電路

圖3 電機驅動電路

表1 電機轉動狀態編碼

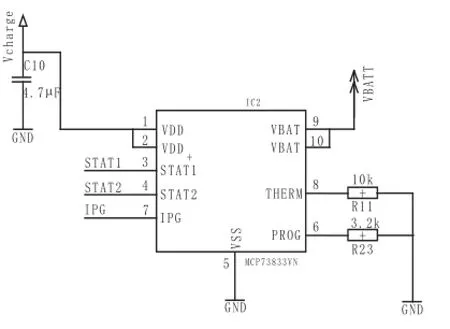
圖4 電池充電電路
(3)電池充電控制輸出VBAT電池充電控制輸出引腳,與電池組的正極相連.此為內部P溝道MOSFET的漏極. MCP73833通過在線性工作區控制該MOSFET工作來給電池組提供恒流和恒壓調節.
(4)溫度判斷THERM,由于不需要溫度監控功能,所以在THERM引腳和VSS之間連接一個標準10 K電阻.
(5)電池管理0 V參考電壓VSS接該引腳接電池的負極和輸入電源的地.
(6)狀態指示STAT1、STAT2、PG如表2所示,接MSP430的引腳. 2.5紅外通訊模塊
紅外通信技術就是利用紅外線來傳遞數據,是無線通訊技術的一種.其優點是保密性強,信息容量大,結構簡單,既可以在室內使用,也可以在野外使用.通過對發送信號進行編碼、調制,具有可靠性高、誤差小、成本低、傳輸距離遠、功耗低等特點.一般由紅外發射和接收系統兩部分組成,通過數據電脈沖和紅外光脈沖之間的相互轉換實現無線的數據收發.發射系統對一個紅外輻射源進行調制后發射紅外信號,而接收系統用光學裝置和紅外探測器進行接收.
螞蟻機器人的紅外發射電路如圖5所示.信號TX由單片機MSP430控制,當MOS管的柵極G為高電平時,紅外發射二極管點亮發射紅外線;當MOS管的柵極G為低電平時,紅外發射二極管斷開.
螞蟻機器人的紅外通信電路中的接收電路如圖6所示.螞蟻機器人用三個紅外光敏二極管來接收各個方向的紅外線.此處光敏二極管不但用于接收紅外線,還用做環境光傳感器,而這兩個功能在電路中需要不同的上拉條件.當用于接收紅外線時,因為這時光敏二極管的電阻阻值變化幅度很大,只需要低靈敏度,所以上拉電阻選擇10 K;當用于環境光傳感器時,因為光敏二極管的電阻阻止變化幅度很小,所以需要很高的靈敏度,上拉電阻選擇100 K.單片機MSP430控制信號端BIAS1和BIAS2適當的轉換這兩種情況.電路中的交流耦合用來過濾由環境光所產生的直流.10 K的電阻和330 pF的電容構成高通濾波電路,用來過濾直流和低頻交流信號.濾波器大概在1 kHz處會有3 dB的頻率衰減.接收信號有疊加的直流信號,由于電阻R20和R21的分壓,直流電壓值為所提供電壓的一半.每個光敏二極管的直流電壓輸入到單片機MSP430的PD1,PD2和PD3端.當接收紅外線的信號為0時,此時沒有被紅外發射管的紅外信號所覆蓋,光敏二極管不用于接收紅外線,上拉電阻的切換與環境光度的測量同時進行.

表2 充電周期狀態
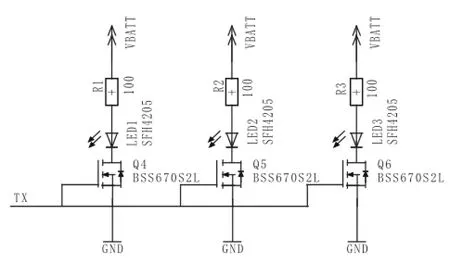
圖5 紅外發射電路

圖6 紅外線接收電路
2.6 目標檢測模塊
由位于車底的灰度傳感器進行判斷是否找到目標.灰度傳感器由反射式紅外光電判讀器組成,即一個紅外發光管和紅外三極管并排綁定構成.其電路圖如7所示.2.2 K電阻是光敏晶體管的上拉電阻,信號目標與單片機MSP430的數字輸入接口相連.分別測量目標端在有光照和沒有光照的信號,將這兩個信號相減得到反射度.
2.7 指示電路
指示電路用于顯示螞蟻機器人的狀態,如圖8所示.紅燈亮表示搜索到目標,滅表示未搜索到目標.綠燈亮表示電量不足,滅表示電量充足.

圖7 目標檢測電路
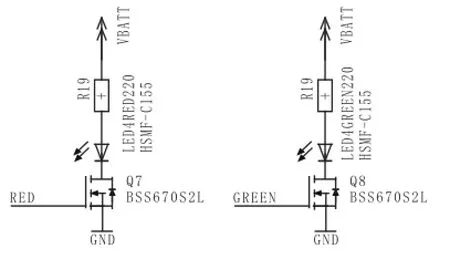
圖8 指示電路
3 螞蟻機器人的軟件設計
3.1 螞蟻機器人搜索示意圖
每個螞蟻機器人在一定范圍內搜索目標,而且搜索的過程彼此獨立,僅通過傳感器進行通信,實現不同螞蟻機器人之間不斷進行信息交流和傳遞,從而能夠相互協作,完成尋找目標的任務.
在示意圖中有4個螞蟻機器人,當1號螞蟻機器人找到目標的時候,發出紅外信號通知其他螞蟻機器人目標已經找到,在發出的紅外信號中加入特征碼,區別找到目標的螞蟻機器人,其他螞蟻機器人接受到紅外信號后就停止搜索目標.每個螞蟻機器人上3個紅外發射管構成360度,三個紅外發射管輪流發出紅外信號,在120度的范圍內接收到信號的螞蟻機器人根據紅外信號的強度和接收的時間段判斷機器人之間的相對方位和距離,再向1號螞蟻機器人發出應答信號,然后通過各機器人之間的互相通訊獲得各機器人的位置,而較遠的機器人可通過與之臨近的機器人找到目標,使各機器人選擇路徑,做出最快的動作,最終在最短的時間內找到目標.
3.2 主程序流程圖
機器人啟動時,先初始化各模塊,然后進入隨機尋找(隨機運動)狀態,當搜索到目標后機器人停止運動,進入通訊狀態,告知其他機器人目標以找到,并檢查是否所有的機器人接受到,如果沒有并且沒有接受到有效的紅外信號,則繼續搜尋,如果接受到了其他機器人發射的目標信號,則開始以細胞分裂狀通知其他機器人,當所有的機器人收到目標信號后開始向目標靠攏,最后找到目標.

圖9 螞蟻搜索示意圖
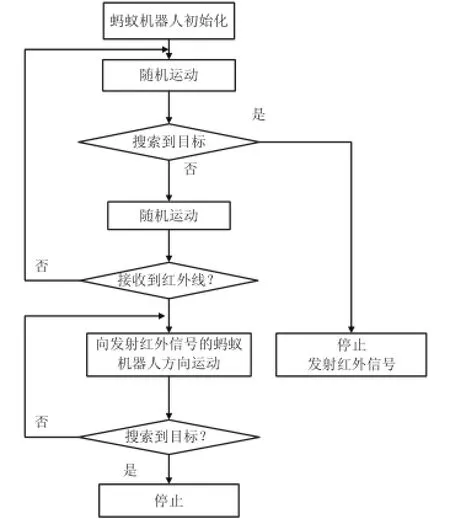
圖10 主程序流程圖
4 實驗調試
為了驗證所設計的螞蟻機器人的可行性,在完成硬件設計的基礎上,進行了相關的實驗,圖11的(a)-(f)圖顯示了螞蟻機器人的搜索過程.從實驗結果可以看出,本設計是可行的.

圖11 螞蟻機器人的搜索過程
[1]董曉坡,王緒本.救援機器人的發展及其在災害救援中的應用[J].防震減災工程學報,2007,27(1):112-117.
[2]王忠民.災難搜救機器人研究現狀與發展趨勢[J].測控技術,2007(17):152-155.
[3]沈建華,楊艷琴.MSP430系列16位超低功耗單片機原理與實踐[M].北京:北京航空航天大學出版社,2008:125-146.
[4]劉剛,彭榮群.Protel DXP 2004 SP2原理與PCB設計[M].北京:電子工業出版社,2007:283-320.
The Design of the Ant Robots Based on Search and Rescue Function
SUN Shi-cheng,MAO Li-min,ZHANG Li-jun,XU Zheng
(School of Electrical and Automation Engineering,Changshu Institute of Technology,Changshu 215500,China)
There are many disadvantages of search robots at present.For example,the large volume prevents robots from entering the confined space to search for survivors and it takes too much time to find the survivors.In this pa?per,a kind of ant robot based upon MSP430F2234 microprocessor is proposed.The ant robot can search indepen?dently and communicate with each other using infrared sensors.Ant robots have low power consumption,small vol?ume,and find the target rapidly and accurately.
search and rescue;ant robots;MSP430F2234 microcontroller
TP368.1
B
1008-2794(2012)04-0064-05
2012-03-16
江蘇省大學生實踐創新訓練計劃項目“基于搜救功能的螞蟻機器人設計”(S1133)
孫世成(1991—),男,江蘇徐州人,常熟理工學院電氣與自動化工程學院自動化專業學生.
毛麗民(1981—),男,江蘇常熟人,講師,碩士,研究方向:機器人與目標跟蹤研究,E-mail:maolimin_1981@163. com.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國生殖健康(2019年3期)2019-02-01 06:12:26
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年19期)2017-02-02 07:08:27
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
