翼傘系統(tǒng)雀降性能及控制研究*
2012-06-11 01:12:40張興會(huì)朱二琳
航天控制 2012年1期
關(guān)鍵詞:系統(tǒng)
張興會(huì) 朱二琳
天津職業(yè)技術(shù)師范大學(xué)自動(dòng)化與電氣工程學(xué)院,天津 300222
翼傘系統(tǒng)雀降性能及控制研究*
張興會(huì) 朱二琳
天津職業(yè)技術(shù)師范大學(xué)自動(dòng)化與電氣工程學(xué)院,天津 300222
根據(jù)翼傘系統(tǒng)的動(dòng)力學(xué)方程,建立六自由度運(yùn)動(dòng)模型。對(duì)翼傘系統(tǒng)雀降過程進(jìn)行仿真,分析了操縱方式對(duì)雀降性能的影響。在歸航過程中著陸階段的特定情況下,針對(duì)航跡跟蹤過程中產(chǎn)生的縱向偏差,設(shè)計(jì)PID控制器對(duì)偏差進(jìn)行修正。仿真結(jié)果表明:所設(shè)計(jì)的控制器簡單有效地消除了縱向的偏差,保證了雀降操縱的順利實(shí)施。
翼傘系統(tǒng);雀降操縱;航跡跟蹤;PID控制
沖壓式翼傘憑借其良好的可操縱性能被廣泛的應(yīng)用于武力和救援物資的投放以及航天器回收等領(lǐng)域[1]。能否按預(yù)定航跡定點(diǎn)著陸以及著陸時(shí)空投物的安全問題是評(píng)價(jià)整個(gè)空投系統(tǒng)的重要指標(biāo)。通過同時(shí)下拉傘衣后緣兩側(cè)的操縱繩可以實(shí)現(xiàn)對(duì)翼傘的減速操縱,如果操縱高度選擇適當(dāng),還可以使系統(tǒng)實(shí)現(xiàn)雀降[2],達(dá)到無損著陸的要求。
本文首先建立翼傘系統(tǒng)六自由度運(yùn)動(dòng)模型,通過對(duì)模型進(jìn)行雀降操縱的仿真來分析操縱速度對(duì)雀降性能的影響。文獻(xiàn)[3]給出了翼傘系統(tǒng)歸航過程中側(cè)向偏差的修正方法。在此基礎(chǔ)上,設(shè)計(jì)PID控制器對(duì)翼傘系統(tǒng)著陸階段可能產(chǎn)生的縱向偏差進(jìn)行修正,以保證最后雀降操縱的實(shí)施和落點(diǎn)精度。
1 翼傘系統(tǒng)模型描述
翼傘系統(tǒng)是一個(gè)多輸入多輸出的非線性系統(tǒng)。對(duì)于歸航控制而言,復(fù)雜的模型會(huì)大大增加計(jì)算的復(fù)雜度,影響控制效果。結(jié)合實(shí)際工程需要,推導(dǎo)并建立六自由度的翼傘系統(tǒng)動(dòng)力學(xué)模型,包括隨質(zhì)心的平動(dòng)和繞質(zhì)心的轉(zhuǎn)動(dòng)。在對(duì)系統(tǒng)進(jìn)行建模之前,需做如下假設(shè)[4-6]:
1)翼傘是展向?qū)ΨQ的,傘衣完全充氣展開后有固定的形狀;
2)空投物與翼傘剛性連接成一個(gè)整體;
3)對(duì)于空投物只考慮其所受的阻力,升力忽略不計(jì);
4)傘衣的壓心與質(zhì)心重合,位于弦向距前緣1/4處;
5)地面為平面大地。
翼傘在空中運(yùn)動(dòng)近似于在理想流體中運(yùn)動(dòng),須考慮附加質(zhì)量對(duì)整個(gè)系統(tǒng)的影響。因此,系統(tǒng)總的動(dòng)力學(xué)方程由兩部分組成,一部分由真實(shí)質(zhì)量產(chǎn)生,另一部分由附加質(zhì)量產(chǎn)生。附加質(zhì)量參考Barrows[7]提出的計(jì)算方法。本文只給出主要推導(dǎo)過程,詳細(xì)資料和公式見參考文獻(xiàn)[8-9]。
由克希霍夫運(yùn)動(dòng)方程可得:
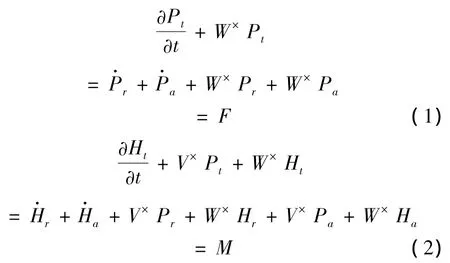
其中:Pt和Ht分別代表系統(tǒng)動(dòng)量和動(dòng)量矩;下標(biāo)“r”表示由真實(shí)質(zhì)量產(chǎn)生,下標(biāo)“a”表示由附加質(zhì)量產(chǎn)生;V,W分別代表原點(diǎn)O處的速度和角速度;上標(biāo)“×”表示向量間的叉乘運(yùn)算;F,M分別代表外力和外力矩,包括氣動(dòng)力和重力。令:
對(duì)公式(1)和(2)進(jìn)行變換得:

根據(jù)系統(tǒng)動(dòng)量和動(dòng)量矩的公式,式(3)和(4)等號(hào)左邊寫成矩陣形式得:

其中:Ar,Aa代表系統(tǒng)真實(shí)質(zhì)量矩陣和附加質(zhì)量矩陣;Fnl,Mnl代表其他非線性外力產(chǎn)生的力和力矩。
2 翼傘系統(tǒng)雀降性能
雀降是翼傘的一種重要特性。當(dāng)翼傘以滑翔狀態(tài)接近地面時(shí),如果以較快的速度迅速將兩操縱繩同時(shí)拉下,在很短的時(shí)間內(nèi)翼傘的水平速度和垂直下降速度將會(huì)先迅速減小到極小值。如果開始操縱的高度選擇適當(dāng),可使著陸時(shí)的速度正好達(dá)到極小值,此種操縱著陸便稱為雀降著陸。
翼傘在滑翔過程中迅速以某一速度同時(shí)下拉兩側(cè)操縱繩,會(huì)使翼傘傘衣氣動(dòng)外形發(fā)生急劇的變化,從而改變翼傘系統(tǒng)整體的升、阻力系數(shù)。其運(yùn)動(dòng)速度也會(huì)隨之改變,直至達(dá)到新的平衡狀態(tài)為止。其中,操縱速度是整個(gè)雀降過程的關(guān)鍵,本文采用線性操縱方式對(duì)雀降進(jìn)行仿真,即操縱繩的下拉速度保持不變。如下式所示:
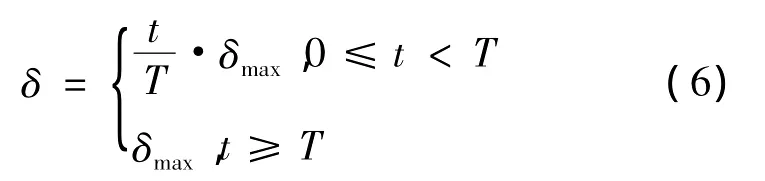
其中,δ為傘衣后緣的下偏量;δmax為傘衣后緣雙側(cè)下偏的最大量;t為雀降過程的時(shí)間變量;T為從雀降操縱開始到下偏量達(dá)到最大值所經(jīng)歷的時(shí)間。
以上述六自由度模型為基礎(chǔ),對(duì)翼傘系統(tǒng)進(jìn)行雀降仿真試驗(yàn)。初始條件為v0=(15.9 0 2.1)m/s;初始位置為(002000)m。
分別取T=3s,1.5s時(shí),翼傘系統(tǒng)的速度變化曲線如圖1,2所示。
由圖1可以看出:在t=41.43s時(shí),系統(tǒng)垂直速度降到最小值為2.10m/s;t=42.98s時(shí),系統(tǒng)水平速度降到最小值為9.99m/s。隨后垂直和水平速度會(huì)有所升高,最后趨于平衡。在時(shí)刻42.65s時(shí),系統(tǒng)的合速度降到最小值10.44m/s。系統(tǒng)的垂直下降速度和合速度并不是在同一時(shí)刻達(dá)到最小值,要使空投系統(tǒng)能夠?qū)崿F(xiàn)無損著陸,必須根據(jù)實(shí)際工況和系統(tǒng)的減震措施來決定系統(tǒng)著陸時(shí)應(yīng)使垂直下降速度降到最小還是合速度降到最小。而當(dāng)T=1.5s時(shí),系統(tǒng)在時(shí)刻40.58s垂直速度降到最小值為1.72m/s。在時(shí)刻42.03s水平速度降到最小值為9.70m/s。可以看出,在其他條件相同的情況下,T越小即雙拉兩側(cè)操縱繩的速度越快,系統(tǒng)會(huì)獲得越小的速度。但是實(shí)際的空投系統(tǒng)通過電機(jī)絞盤的轉(zhuǎn)動(dòng)來實(shí)現(xiàn)下拉操縱繩,過快的下拉速度易造成系統(tǒng)的瞬間不穩(wěn)定,所以應(yīng)根據(jù)實(shí)際情況合理的選擇拉繩的速度。

3 著陸段控制
3.1 控制器的設(shè)計(jì)
對(duì)于翼傘系統(tǒng)歸航控制而言,著陸段的逆風(fēng)對(duì)準(zhǔn)和滑翔過程是保證雀降實(shí)施的關(guān)鍵。文獻(xiàn)[3]采用Serret-Frenet坐標(biāo)系表示距離“平衡”軌跡的偏差,得到翼傘系統(tǒng)側(cè)向和縱向位置偏差并給出了消除側(cè)向偏差的控制算法。對(duì)于縱向偏差,由于雙側(cè)下偏會(huì)影響翼傘系統(tǒng)的速度,且電機(jī)也不利于頻繁操縱,所以只有在著陸階段才會(huì)視情況實(shí)施雙側(cè)的下偏。
雙側(cè)下偏會(huì)減小系統(tǒng)的滑翔比[10],當(dāng)縱向偏差為負(fù)值,即翼傘系統(tǒng)位于所規(guī)劃航跡的下方時(shí),如果不附加其他動(dòng)力而僅靠下拉操縱繩,則無法實(shí)現(xiàn)對(duì)縱向偏差的修正。下面就翼傘系統(tǒng)在著陸段縱向偏差的修正給出具體的控制方法,假設(shè)系統(tǒng)無側(cè)向偏差,僅存在縱向正偏差。采用最為經(jīng)典的PID控制,對(duì)于縱向通道的航跡控制器結(jié)構(gòu)設(shè)計(jì)如圖3所示。
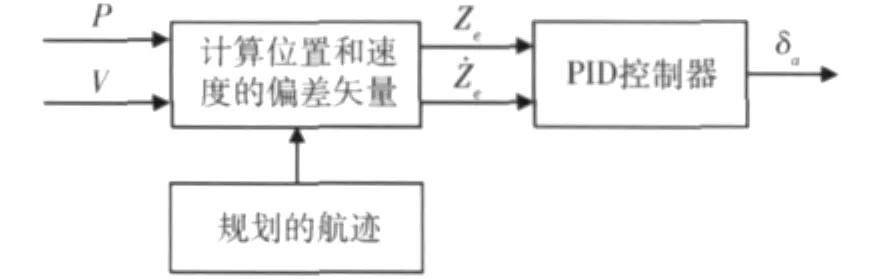
圖3 縱向通道航跡控制器結(jié)構(gòu)示意圖
3.2 偏差量的選取
翼傘系統(tǒng)著陸段的飛行主要以滑翔為主且假設(shè)不存在側(cè)向偏差,則其在空中的軌跡近似為空間中的一條直線。所以,縱向偏差可以簡單的取翼傘系統(tǒng)實(shí)際位置同規(guī)劃航跡之間的高度差。用下式表示:

其中,Ze代表縱向通道的偏差;h代表翼傘系統(tǒng)的實(shí)際高度;P1代表翼傘系統(tǒng)的水平位置信息;H(P1)代表規(guī)劃航跡中水平位置P1所對(duì)應(yīng)的高度,可通過直線擬合的方法求得。
3.3 PID控制
PID控制器由比例環(huán)節(jié)(P)、積分環(huán)節(jié)(I)和微分環(huán)節(jié)(D)組成。其偏差輸入e與控制輸出u的關(guān)系可表示為:

其中,Kp為比例系數(shù);Ti為積分時(shí)間常數(shù);Td為微分時(shí)間常數(shù)。偏差e(t)由式(7)計(jì)算得到。
3.4 仿真試驗(yàn)
著陸段逆風(fēng)對(duì)準(zhǔn)的作用是減小系統(tǒng)的水平速度,以保證著陸時(shí)空投物的安全。從上述六自由度模型輸出的數(shù)據(jù)來看,如表1所示。無風(fēng)作用時(shí),雀降高度為15.67m;5m/s常值風(fēng)作用時(shí),雀降高度為15.77m。所以風(fēng)對(duì)系統(tǒng)雀降高度的影響可以忽略不計(jì)。空投物底部安裝了特殊的減震系統(tǒng)[11],因此試驗(yàn)要求,系統(tǒng)最后落地時(shí),垂直下降速度達(dá)到最小。雀降操縱采用式(6)的線性操縱方式且T=3s。

表1 雀降高度隨風(fēng)速的變化
初始條件:規(guī)劃軌跡的初始點(diǎn)為(0 0 800)m;初始縱向偏差為40m;初始速度為(17 0 4)m/s;風(fēng)速為5m/s,風(fēng)向沿X軸負(fù)方向。
控制器:經(jīng)參數(shù)整定后,控制器的參數(shù)取值為:Kp=0.046,Ti=0.0015,Td=0.06。
仿真結(jié)果如圖4~8所示。
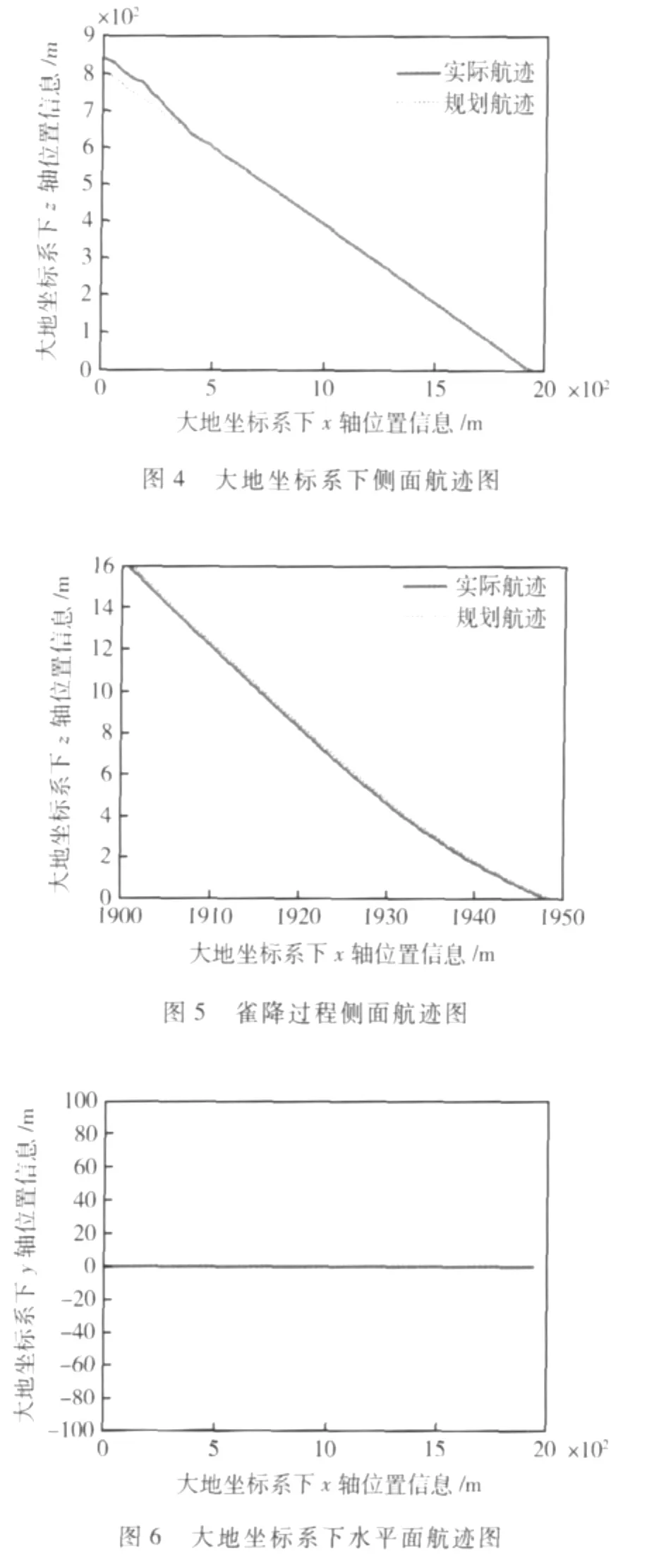

結(jié)果分析:所設(shè)計(jì)的PID控制器能有效修正縱向通道的正偏差,由于開始時(shí)刻偏差最大,控制能量也相應(yīng)輸出最大,再加上有風(fēng)的干擾,所以系統(tǒng)速度變化比較劇烈。但隨著偏差的修正,系統(tǒng)逐漸趨于平穩(wěn)。雙側(cè)下拉操縱繩所施加的控制量是一樣的,水平面的航跡方向不會(huì)發(fā)生改變。當(dāng)系統(tǒng)達(dá)到雀降高度,控制能量線性增加。系統(tǒng)著陸時(shí),垂直下降速度達(dá)到最小值1.56m/s,落點(diǎn)誤差為0.57m。
4 結(jié)束語
本文在六自由度模型的基礎(chǔ)上,分析了翼傘系統(tǒng)雀降性能以及操縱方式對(duì)雀降性能的影響。采用經(jīng)典的PID控制器修正翼傘系統(tǒng)在逆風(fēng)對(duì)準(zhǔn)后可能產(chǎn)生的縱向正偏差。仿真結(jié)果表明:PID控制器能有效的修正縱向正偏差且最后的雀降效果也比較理想。但是此控制器只能用于修正縱向正偏差。當(dāng)翼傘系統(tǒng)的位置位于規(guī)劃航跡的下方時(shí),在不加其他動(dòng)力的情況下則無法修正。此外,雙側(cè)下拉操縱繩對(duì)滑翔比的改變不是很大。因此當(dāng)偏差很大,而最后滑翔段的距離又不是很長時(shí),也會(huì)影響最后的著陸。這些問題有待在以后的研究中解決。
[1]D.Carter,S.George,P.Hattis,et al.Autonomous large parafoil guidance,navigation,and control system design status[R].19th AIAA Aerodynamic Decelerator System Technologe Conference and Seminar,Williamsburg,VA,2007.
[2]王利榮.降落傘理論與應(yīng)用[M].北京:宇航出版社,1997.
[3]熊菁,程文科,秦子增.基于Serrt-Frenet坐標(biāo)系的翼傘系統(tǒng)軌跡跟蹤控制[J].動(dòng)力學(xué)與控制學(xué)報(bào),2005,3(2):89-93.(XIONG Jing,CHENG Wenke,QIN Zizeng.Path-following of Parafoil System based on Serretfrenet[J].Journal of Dynamics and Control,2005,3(2):89-93.)
[4]熊菁,秦子增,程文科.翼傘系統(tǒng)彈性連接模型的相對(duì)運(yùn)動(dòng)分析[J].彈道學(xué)報(bào),2006,18(1):25-29.(XIONG Jing,QIN Zizeng,CHENG Wenke.Analysis of Relative Motion of Parafoil System in Flexibly Jointed Model[J].Journal of Ballistics,2006,18(1):25-29.)
[5]王海濤,郭書偉,秦子增.物傘系統(tǒng)空間運(yùn)動(dòng)模式分析[J].航天返回與遙感,2009,30(1):21-26.(WANG Haitao,GUO Shuwei,QIN Zizeng.Modes in Space Motion of the Parachute-Payload System[J].Spacecraft Recovery&Remote Sensing,2009,30(1):21-26.)
[6]朱二琳,張興會(huì).翼傘空投系統(tǒng)模糊控制器的設(shè)計(jì)與實(shí)現(xiàn)[J].電子測量技術(shù),2011,34(4):46-49.(ZHU Erlin,ZHANG Xinghui.Design and Application of Fuzzy Controller in Parafoil Airdrop System[J].Electronic Measurement Technology,2011,34(4):46-49.)
[7]T.Barrows.Apparent mass of parafoils with spanwise camber[J].Jurnal of Aircraft,2002,39(3):445-450.
[8]熊菁.翼傘系統(tǒng)動(dòng)力學(xué)與歸航方案研究[D].長沙:國防科技大學(xué)(博士),2005.(XIONG Jing.Research on the Dynamics and Homing Project of Parafoil System[D].Chang Sha:National University of Defense Technology,2005.)
[9]Slegers N J,Yakimenko O A.Optimal control for terminal guidance of autonomous parafoils[R].20th AIAA Aerodynamic Decelerator Systems Technology Conference and Seminar,Seattle,Washington,2009.
[10]Kaminer I I,Yakimenko O A.Development of control algorithm for the autonomous gliding delivery system[R].17th AIAA Aerodynamic Decelerator Systems Technology Conference and Seminar,Monterey,California,2003.
[11]張興會(huì),鄧三鵬,王仲民,等.災(zāi)難環(huán)境下信息快速獲取空投機(jī)器人系統(tǒng)研究[J].機(jī)器人技術(shù)與應(yīng)用,2011,(1):36-40.
The Study of the Flare-Landing Performance and Control of Parafoil System
ZHANG XinghuiZHU Erlin
School of Automation and Electronic Engineering,Tianjin University of Technology and Education,Tianjin 300222,China
According to the dynamic equations of parafoil system,the6-DOFmotion model established is presented.The flare-landing process of parafoil system is simulated to analyze the effect of control method applied to the performance of flare-landing.Under the special circumstance in the phases of the landing of homing process,PIDcontroller is designed to correct the deviations due to the vertical error which is generated in the process of trajectory tracking.The simulation results show that the designed controller can eliminate the vertical errors simply and effectively and ensures the smooth flare-landing maneuver.
Parafoil system;Flare-landing maneuver;Trajectory tracking;PIDcontrol
V445.2;TP273
A
1006-3242(2012)01-0029-04
*天津市科技支撐重點(diǎn)項(xiàng)目(09ZCKFSF00500)
2011-09-05
張興會(huì)(1963-),男,河北滄州人,教授,博士,研究方向?yàn)榻M合導(dǎo)航、智能控制技術(shù);朱二琳(1986-),男,安徽蚌埠人,碩士研究生,主要研究方向?yàn)閷?dǎo)航、制導(dǎo)與控制。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32