GPS基線解算質量優化方法的研究
2012-06-29 07:26:26張萌丁克良
城市勘測 2012年4期
張萌,丁克良
(北京建筑工程學院,北京 100044)
1 前言
GPS基線解算是GPS數據后處理的重要環節之一,其解算質量的好壞直接影響到GPS靜態相對定位的成果與精度。基線解算過程中,Ratio值、RMS(均方根誤差)、RDOP值、復測基線較差和閉合環較差等因素是控制基線解算質量的重要指標,在實際工程應用中,基線向量由于受到多方面因素(起算點的坐標不準確、衛星觀測時間太短、周跳現象、多路徑效應以及電離層傳播延遲等)的影響,基線的各項質量控制指標往往不能滿足規范要求,導致基線得不到固定解,嚴重影響基線解算結果的質量。為此,眾多學者和工程領域技術人員進行了大量研究,并提出了多種優化措施。比如楊建軍從數據處理的有關參數的選擇以及解算策略角度入手,提出了優化基線和提高解算精度的方法[1];王國祥以TGO軟件為例詳細闡述提高基線解算質量的措施[2];梁洪寶等以起算點的選擇問題入手,研究了起算點偏差對GPS基線解算的影響[3]等等。目前,隨著中國測繪技術的發展,國產GPS接收機在工程項目中應用越來越廣泛,因此本文以華測公司的GPS接收機為例,在總結各種基線處理的質量控制指標的基礎上,結合實際工程應用的經驗,對影響GPS基線解算的主要因素進行逐一分析,并以2010年參加的河南省洛盧高速公路GPS復測項目采集到的GPS觀測數據為例,針對華測GPS接收機基線處理軟件—Compass軟件,提出詳細的解決方案,最后針對GPS基線成果檢驗中的超限情況提出了幾點糾正措施。
2 GPS基線解算的質量控制指標
GPS基線解算質量控制的目的是為后續數據處理提供合格的基線向量成果。評定基線解算質量的指標分為兩類,一類是基于統計學原理提出的參考指標,另一類是基于測量規范提出的控制指標。在工程應用中,控制指標必須滿足,而參考指標并不能作為判斷基線質量是否合格的依據[4]。
2.1 基線質量的參考指標
(1)比率Ratio值

式(1)中,σ次最小和σ最小分別為在基線解算確定相位模糊度的過程中,由備選模糊度組所得到的最小單位權方差和次最小單位權方差。
Ratio值是一個比值,該值能反映出所確定出的整周未知數參數的可靠性。它大于或等于1,并且值越大則說明整周未知數可靠性越高。Ratio值取決于多種因素,與觀測值的質量和觀測條件的好壞有關。
(2)觀測值殘差的RMS
RMS即均方根誤差(Root Mean Square),即:

其中,V為觀測值的殘差,n為觀測值總數。
RMS能體現出觀測值的質量的好壞,它反映了觀測噪音、周跳修復程度、觀測改正模型誤差等因素的綜合影響,該值不受觀測條件(如衛星分布好壞)影響。RMS越小,則觀測值的質量越高;反之,表明觀測值的質量越低。
根據理論分析與實踐經驗,RMS和Ratio參數的質量如表1所示。
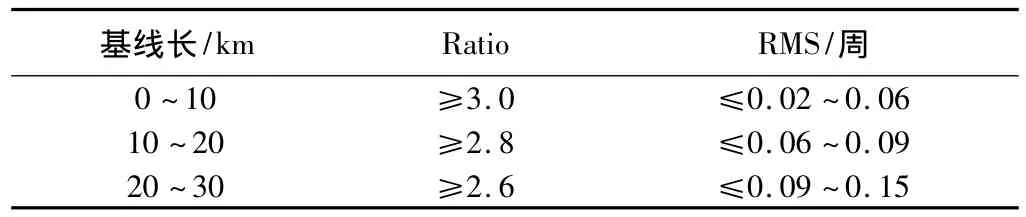
RMS、Ratio主要參數質量表[5] 表1
(3)相對幾何強度因子RDOP值
RDOP值指的是在基線解算時,待定參數的協因數陣的跡[tr(Q)]的平方根,即:

RDOP值與基線的位置和衛星在空間中的位置分布以及衛星的運行軌跡(即觀測條件)有關。RDOP反映了GPS衛星的狀態對相對定位的影響,即取決于觀測條件的好壞,不受觀測值質量好壞的影響。
在Compass軟件中,經過基線處理后,通過基線向量窗口可以查看基線的參考指標值,如圖1所示,在基線處理結果中,從左到右分別為基線的Ratio值、雙差固定解的 RMS、DX(單位:m)、DY(單位:m)、DZ(單位:m)和基線長(單位:m)。
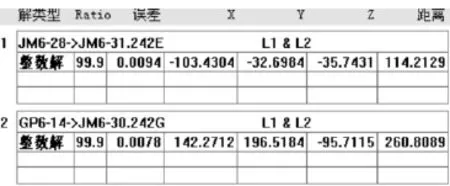
圖1 基線解算成果(Compass軟件運行結果截圖)
2.2 基線質量的控制指標
(1)復測基線較差
不同觀測時段對同一條基線的觀測成果即為復測基線,而復測基線較差即為這些觀測成果的差異。復測基線較差是判定基線結果質量的重要指標。如果出現超限情況,則表明復測基線中一定存在質量不滿足要求的基線。
(2)同步環閉合差
同步環閉合差是由同步觀測基線所構成的閉合環的閉合差。由于同步觀測基線之間具有一定的內在聯系,因此同步環閉合差在理論上應該是0。在一般工程應用中,同步環閉合差往往并不能保證為0,但一般是一微小量。如果出現同步環閉合差超限的情況,則說明組成該同步環的基線中至少存在一條基線向量是有問題的,但是反過來,如果同步環閉合差沒有超限,還不能保證組成同步環的所有基線的質量都合格。
(3)異步環閉合差
異步環即由不全是同步觀測基線所組成的閉合環,該閉合環的閉合差稱為異步環閉合差。當異步環閉合差滿足限差要求時,則表明組成異步環的所有基線向量的質量是合格的;如果異步環閉合差超限,則說明組成異步環基線向量中至少存在一條基線向量的質量不合格。
復測基線較差、同步環閉合差和異步環閉合差是檢驗基線質量的重要指標。Compass軟件提供了復測基線較差、同步環閉合差和異步環閉合差的檢查功能,如圖2中顯示的為同步環閉合差的檢查結果,結果中列出了組成同步環的每條基線的各項參數[Ratio值,DX(單位:m)、DY(單位:m)、DZ(單位:m)和基線長(單位:m)]以及同步環的相對誤差、各個坐標軸方向的閉合差(單位:m)及同步環總長度(單位:m)。

圖2 同步環閉合差檢查結果(Compass軟件運行結果截圖)
3 影響GPS基線質量的因素及其解決方案
基線解算的重要影響因素主要有起算坐標精度差、衛星觀測時間太短、周跳過多、多路徑效應、電離層傳播延遲與對流層折射五大類因素。下面針對以上五大因素做一分析,并針對Compass軟件,提出詳細的解決方案。
3.1 起算點坐標精度差
數據處理過程中需要為基線選擇一個點的WGS-84坐標為起算,如果起算點的精度差,則會引起基線在尺度和方向上出現一定偏差。該偏差可用以下公式表示:

式中:△s為已知起算點誤差;r為衛星至基線中點的距離;△b為基線誤差;b為基線長度。
由上可以看出,當基線長度一定時,已知點誤差越大,則引起的基線誤差越大。
解決方案:一般在實際工程中,起算點可以采用較長時間的單點定位或通過與某WGS-84坐標較準確的點聯測得到,同時也可以在進行整網的基線解算時,將所有基線起點的坐標均由某點坐標衍生而來,使基線處理結果均具有某一系統偏差然后再在GPS網平差處理時引入該系統參數即可。
3.2 衛星觀測時間太短
衛星的觀測時間太短時則會導致與該顆衛星有關的整周未知數無法準確確定。對于基線來講,如果與參與計算衛星相關的整周未知數沒有準確確定的話,會嚴重影響該基線的解算質量。在Compass軟件中,可以通過檢查基線的觀測數據圖查看衛星觀測時間,如圖3中,很容易看出衛星12的有效時間(衛星截止角為15°)只有不到5 min。
解決方案:剔除掉觀測時間太短的時段,使之不參與基線解算。
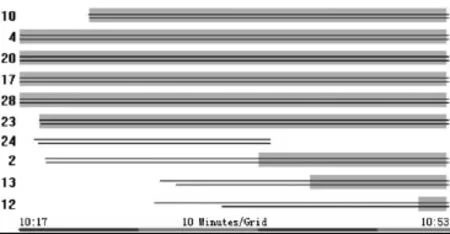
圖3 衛星觀測數據圖
3.3 周跳太多
周跳是由于某種因素(比如信號遮擋)而造成信號失鎖,從而導致無法獲得準確的整周未知數的現象。周跳可以通過一定方法(比如高次差法)進行修復,但是如果周跳太多,將會導致周跳修復不完善的情況發生。周跳太多可以從基線的殘差圖上可以看出。如圖4中所示,衛星7的L1波段出現周跳現象。
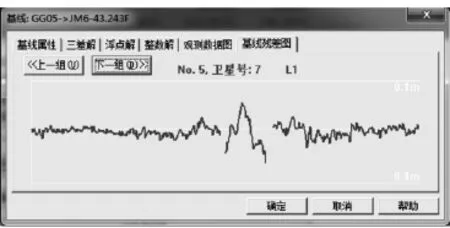
圖4 周跳現象
解決方案:由于Compass軟件目前不支持直接剔除衛星的功能,所以若衛星在某個時間段內經常發生周跳,則通過采用刪除周跳嚴重的時間段的方法來嘗試優化基線解算結果。
3.4 多路徑效應
觀測時段內,如果外界觀測環境較差,多路徑效應(房屋、樹木、汽車、大面積水面的影響)比較嚴重,將會導致觀測值的殘差普遍偏大。
解決方案:由于多路徑效應往往造成觀測值殘差較大,因此可以采用縮小編輯因子或刪除多路徑效應嚴重的時間段或衛星的方法來剔除殘差較大的觀測值。采用Compass軟件進行解算時一般采用刪除多路徑效應的時間段對基線進行優化,但是更好的方法是在外業選點埋石時盡量避開高層建筑等容易造成多路徑效應的位置。
3.5 電離層傳播延遲和對流層折射
電離層的傳播延遲和對流層的折射影響較大時,將會導致整周未知數確定困難。多路徑與電離層和對流層的影響可以從基線殘差圖上看出,它不像未修復的周跳那樣出現整周的跳變,而是觀測值的殘差明顯大于正常觀測值的殘差。如圖5中,衛星19受到多路徑或者是電離層和對流層的影響的殘差圖,圖中可以看出殘差偏離正常值非常大且有不斷增大的趨勢。
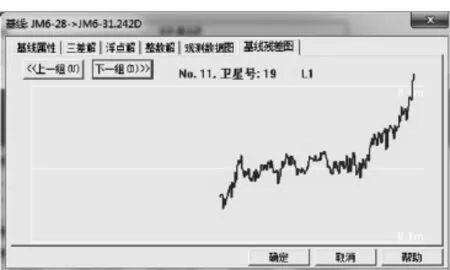
圖5 不明因素影響
解決方案:電離層傳播延遲和對流層折射可以通過以下途徑消除或減弱影響:
(1)適當調整截止角,剔除易受對流層或電離層折射影響的低高度角觀測數據。但是這種方法具有一定的盲目性,因為衛星信號受對流層和電離層的影響與高度截止角的高低沒有絕對的關系,即高度截止角高,衛星信號不一定受對流層或電離層的影響就大。因此在設置衛星高度截止角時,要綜合考慮以下兩個方面:如果衛星數目較多時,可以適當增加高度截止角;而如果衛星數目較少時,要適當降低高度截止角以獲取足夠的觀測數據。
(2)分別采用模型對對流層和電離層延遲進行改正。
針對對流層的折射,在Compass軟件中,通過對氣象參數的設定,選擇默認的改進的Hopfield模型即可改正。
4 GPS基線質量的檢驗及超限糾正措施
針對上述五大因素對基線優化處理完畢后,單條基線的各項指標已經滿足規范要求。但是,基線結果仍然不能馬上用于后續的處理,必須進行質量檢驗。基線的質量檢驗內容主要包括檢查多基線構成的復測基線較差、同步環閉合差和異步環閉合差三項指標是否合格。實際應用中,以上指標超限的情況經常發生,根據實際工作中獲取的經驗提出以下糾正措施:
(1)復測基線較差超限:查看Compass軟件的基線處理報告,可以明確看出復測基線的解算情況。若存在超限情況,則應保留觀測時間長,殘差較小的基線,同時禁用質量較差的基線。然后經過解算,若與此條基線相關的同步環和異步環都滿足要求,則保留該基線,否則考慮重測該基線。
(2)同步環閉合差檢查超限:前文已提到,若同步環超限,則說明該同步環中至少一條基線的精度沒有滿足要求。一般來說,通過基線優化處理后消除了影響GPS信號質量的因素,同步環閉合差基本都已經滿足要求。如果出現超限的情況,則可能是外業測量中人為記錯測站名或者是量錯天線高引起。可以嘗試禁用某條基線,然后再次檢查閉合環閉合差,嘗試找出問題基線。如果效果不佳,且網形不能滿足規范要求,則考慮重測該同步環。
(3)異步環閉合差超限:異步環是由不同時段的基線組成,如果出現超限情況,則應對出問題的異步環進行細致分析。首先找出問題的異步環中多次出現問題的基線,并對該基線進行檢查,然后在逐一檢查問題異步環的其他基線。具體檢查內容為檢查該基線與其他基線組成的多個異步環的閉合差,若所有組成的異步環閉合差都超限,那么說明該基線有問題,禁用該基線。
GPS測量規范明確規定,允許舍棄在復測基線邊長較差、同步環閉合差、異步環閉合差檢驗中超限的基線,而不必進行該基線或與該基線有關的同步圖形的重測,但應保證舍棄基線后的獨立環所含基線數應該滿足表2要求。

閉合環或附和路線邊數要求[6] 表2
5 結語
綜上所述,并根據實際工程遇到的問題,提出以下幾點建議,供大家參考。
(1)進行外業測量前,一定要對GPS接收機和電池進行檢查,確保接收機正常工作以及弄清楚每塊電池的持續觀測時間,以保證外業觀測的順利進行。
(2)嚴格控制GPS外業采集的數據質量。實踐證明,質量好的外業數據是提高基線處理精度的前提,質量差的外業數據將會大大增加內業處理的工作量,而且嚴重影響基線處理的質量,甚至會增加外業重測的可能。因此外業觀測過程中,首先在選擇測站時要避開產生多路徑效應以及無線電干擾的場所,并且在測量過程中要合理安排調度,準確量取天線高,做好觀測手簿的記錄。
(3)當天的測量數據要及時處理,檢查基線各項指標是否滿足規范要求。若存在問題,則通過分析基線的殘差圖,判斷影響基線解算結果質量的因素,然后通過采取本文提到的措施對基線進行優化處理。
(4)解算過程中采取刪衛星、剔除時段以及改變衛星高度截止角等參數的措施時,一定要經過細致分析后進行,通過不斷的嘗試,選擇最佳的參數。
[1]楊建軍.GPS基線解算經驗點滴[J].測繪通報,1997(1).
[2]王國祥.GPS基線解算與質量控制[J].鐵道勘察,2005(6).
[3]梁洪寶,吳向陽.起算點坐標偏差對GPS基線解的影響分析研究[J].測繪科學,2009,34.
[4]李征航,黃勁松.GPS測量與數據處理(第二版)[M].武漢:武漢大學出版社,2010.
[5]馬耀昌,辛國.GPS測量誤差與數據處理的質量控制[J].地理空間信息,2006,4(2).
[6]GB/T 18314-2009.全球定位系統(GPS)測量規范[S].
[7]廟成慧,青盛.GPS基線解算方法分析[J].四川建筑,2007,27(4).
[8]李宗華,侯金根,張予杰.影響GPS測量的誤差分析及基線解算優化處理方法[J].全球定位系統,2008(2).
猜你喜歡
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
當代陜西(2021年2期)2021-03-29 07:41:24
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
產品可靠性報告(2017年7期)2017-09-05 09:49:12
媽媽寶寶(2017年3期)2017-02-21 01:22:28
中國塑料(2016年3期)2016-06-15 20:30:00
通信電源技術(2016年3期)2016-03-26 07:13:38
汽車觀察(2016年3期)2016-02-28 13:16:26
