基于Backstepping的船舶航向自適應滑模控制
2012-07-03 06:38:56王林陳楠高嵬
船電技術 2012年4期
王林 陳楠 高嵬
(1. 海軍駐武漢701所軍事代表室,武漢 430064;2. 91206部隊,山東青島 266071;3. 海軍工程大學電氣與信息工程學院,武漢 430033)
0 引言
由于船舶的動態特性或外界條件不斷地變化,使得船舶運動表現出非線性、不確定性、大滯后等復雜的動態特性,從而船舶航向控制的數學模型與擾動模型具有明顯的不確定性,而以確定數學模型為基礎的PID舵的設計就無法實現。近年來,非線性控制理論的發展為復雜系統的控制問題提出了新的解決方法。其中自適應逆推算法(backstepping)[1-3]和具有強魯棒性的滑模控制[4-6]得到了較快的發展,將backstepping算法與滑模控制[7-8]的結合集成了二者的優點,拓寬了滑模控制的應用范圍,并且提高滑模控制的控制品質。
本文針對 Norrbin非線性數學模型,在考慮外界擾動的情況下,將自適應backstepping算法與滑模控制相結合,提出了一種自適應滑模控制算法,通過計算機仿真實驗,驗證了所提算法的有效性。
1 Norrbin非線性數學模型
在自動舵的設計中,本文選取Norrbin非線性數學模型來描述船舶操縱非線性運動[9]。

為了便于想控制器的設計,選取狀態變量x1=Ψ,x2=r, u=(K/T)δ,則船舶運動的非線性模型為
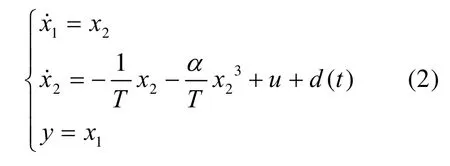
從系統式(2)可以看出,本文的控制目標為設計控制器u,使系統輸出y漸近跟蹤航向期望值ψd,即當t→∞時,跟蹤誤差e=y-ψd→0。
2 基于 Backstepping的船舶航向自適應滑模控制器設計
對Norrbin船舶非線性系統(2),其舵角控制器的設計過程由二步組成。
Step 1 設船舶沿設定的航向dψ航行,定義航向誤差

對(3)式求導,并考慮到系統(2)可得

將x2看作虛擬控制,取虛擬鎮定函數

其中,c1為設計常數。定義函數

則式(4)可變為

定義Lyapunov函數

對其求導,可得

Step 2 定義滑模面函數

對其求導,并考慮式(6)、(7)可得

設計控制器u及參數自適應律為


對其求導,并考慮式(9)、(11)和式(12)可得

將式(13)代入式(15),可得

取

由于

因此,式(16)可以變為

又由于

若適當選取β, c1和 k1,使得 β (c1+βk1)2>1/4,則有,從而可以保證Q為正定矩陣,因此(18)可變為0V≤˙。根據Lyapunov穩定性理論可知控制系統是漸近的。
3 仿真研究
針對某型船進行仿真研究,其參數如下[10]:T = 2 00,K = 0 .6,α = 3 0。應用Matlab/Simulink環境設計了系統(2)的自適應滑模控制算法程序,則參數設計為:c1=0.01, k1=0.35, β=1, y=0.01。假設期望航向值ψd=10°,將外界擾動d( t)等效為d( t)= 0 .01 + 0 .01sin(π t),與傳統的PID控制相比較,仿真結果如圖1和圖2所示。
從圖1可以看出,傳統的PID控制雖然也可以跟蹤航向角,但具有10%的超調量,這在實際控制中是不允許的。而新設計的控制器具有較快的響應速度和較好的跟蹤能力,則能達到滿意的效果。在圖2中,傳統的PID控制舵角抖振嚴重,而自適應滑模控制舵角光滑,舵角合理。總之,新設計的控制器具有較好的控制效果。

圖1 航向角的變化曲線

圖2 舵角的變化曲線
4 結束語
本文在考慮外界擾動的情況下,針對Norrbin非線性數學模型,采用Backstepping算法的設計方法,利用滑模控制強魯棒性的特點,將自適應控制與滑模控制相結合,提出了一種新的自適應滑模控制算法,通過理論研究與仿真實驗,與傳統PID控制算法相比,具有較好的控制性能。
[1]Du J L, Guo C.Nonlinear adaptive design of course-tracking control of ship without a priori knowledge of control gain [J].Control Theory &Applications, 2005, 22(2): 315- 320.
[2]林永屹, 杜佳璐, 牛杰.基于 Backstepping的船舶航向自適應魯棒非線性控制器設計[J].船舶工程, 2007, 29(1): 24-27.
[3]RAHMAN S U.Theory of constraints: a new review of the philosophy and its applications [J].International Journal of Operations and Production Management (S0144-3577), 1998, 18(4): 336-355.
[4]袁雷, 吳漢松.船舶航向非線性系統的多滑模自適應模糊控制[J].智能系統學報, 2010, 5(4):361-364.
[5]CHEE P T, CHRISTOPHER E.Sliding mode observers for reconstruction of simultaneous actuator and sensor faults[C]//Proceedings of the 42nd IEEE Conference on Decision and Control Maui Hawaii USA, 2003: 1455-1460.
[6]劉金琨.滑模變結構控制MATLAB仿真[M].北京: 清華大學出版社, 2005: 4-15.
[7]LIN F J, SHEN P H, HSU S P.Adaptive backstepping sliding mode control for linear induction motor drive[J].IEEE Proceeding Electrical Power Application, 2002, 149(3):184-194.
[8]LI K Y, JUN Z.Adaptive backstepping sliding mode design for TCSC[C]//The Sixth World Congress on Intelligent Control and Automation,2006: 1114-1117.
[9]張顯庫, 賈欣樂.船舶運動控制[M].北京: 國防工業出版社, 2005: 87-89.
[10]卜仁祥, 劉正江, 李鐵山.迭代滑模增量反饋及在船舶航向控制中的應用[J].哈爾濱工程大學學報, 2007, 28(3): 268-272.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
工業設計(2022年8期)2022-09-09 07:43:20
船舶(2021年4期)2021-09-07 17:32:22
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
