近空間高超聲速飛行器慣性導航系統Simulink仿真研究*
2012-07-08 01:17:12劉建業
航天控制 2012年2期
關鍵詞:系統
彭 惠 熊 智 劉建業 王 融
南京航空航天大學導航研究中心,南京 210016
近空間高超聲速飛行器慣性導航系統Simulink仿真研究*
彭 惠 熊 智 劉建業 王 融
南京航空航天大學導航研究中心,南京 210016
近空間高超聲速飛行器具有高動態性特點,能實現精確打擊,要保證其高精度,導航系統是關鍵。慣性導航技術具有可靠性好、輸出連續的優點,是近空間巡航飛行器的核心導航系統。本文利用Simulink與M語言結合完成對近空間高超聲速飛行器慣性導航系統的仿真研究。構建了近空間高超聲速飛行器慣性導航系統的Simulink仿真模型,通過對靜基座下的慣導導航誤差進行分析,驗證了仿真系統的正確性。對近空間高超聲速飛行器的航跡進行了仿真,分析了飛行速度對向心加速度及哥氏加速度的影響,對開展近空間高超聲速飛行器慣性導航系統的研究具有良好的參考意義。
Simulink;慣性導航;近空間高超聲速飛行器
近空間高超聲速飛行器具有飛行速度快、巡航距離遠、突防能力強等特點,具備精確打擊能力[1~3]。美國、俄羅斯、歐洲等國家和地區都投入了大量經費,積極開展近空間高超聲速飛行器的技術研究。目前國內外對近空間飛行器的研究多為對其發動機及控制技術的研究,對其導航系統的全面針對性研究還有待開展。慣性導航技術可以全天候提供全面的飛行器運動狀態信息,同時具有可靠性好、輸出連續的優點,是近空間飛行器的核心導航系統。研究應用在高動態近空間飛行器上的慣性導航系統,對于保證高超聲速飛行器的高打擊精度具有重要意義。
Matlab環境下的Simulink仿真工具箱具有程序設計簡單、直觀,模型層次性強、封裝性好、可移植性強等優點[4],利用Simulink與M語言結合的方式實現對慣性導航系統的仿真能更清晰直觀的理解慣性導航系統的原理結構,同時便于結合現有的近空間飛行器模型對象開展針對性研究。此外,利用Simulink實現對慣導的仿真能更方便的設置仿真時間、慣性測量組件的采樣頻率,便于對仿真過程進行控制和對導航參數的特性分析和結果顯示,具有更好的可操作性。
本文主要結合近空間飛行慣性導航系統性能仿真研究的需要,開展了基于Simulink實現的近空間飛行器慣性導航系統仿真技術研究,建立了相應的綜合算法仿真驗證平臺,分析了飛行速度對向心加速度及哥氏加速度的影響,為后續進一步開展近空間飛行慣性導航系統誤差特性分析和精確修正提供了良好的仿真基礎。
1 近空間飛行器慣導系統Simulink仿真設計研究
1.1 總體方案設計
根據慣導原理,仿真系統總體結構如圖1。
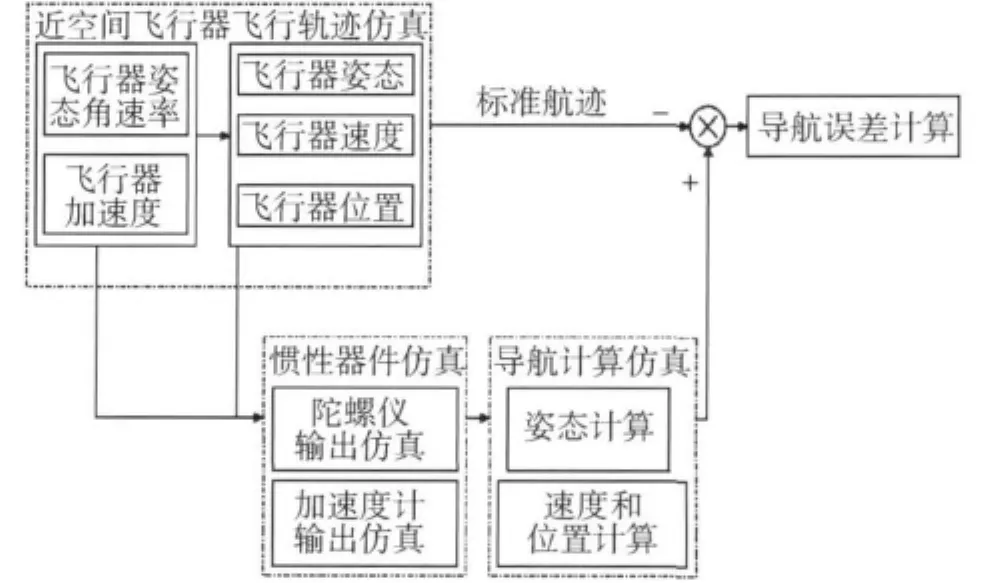
圖1 仿真系統總體結構圖
捷聯慣性導航系統測試需要慣性器件的輸出數據作為捷聯慣性導航計算的輸入,同時還需要載體的飛行軌跡數據作為考察導航系統性能的基準。為此,需要設計一種實用的捷聯慣性導航系統仿真算法,它一方面能模擬飛行器的飛行過程,產生一組標準航跡數據(姿態、速度和位置),為捷聯慣導系統的性能考核提供基準;另一方面能模擬慣性器件工作過程,產生慣性器件(陀螺儀、加速度計)輸出數據,為導航解算提供輸入。
參考圖1的仿真系統結構圖,搭建近空間飛行器慣性導航Simulink仿真系統的模型為4部分:近空間飛行器飛行航跡仿真模塊、慣性器件輸出仿真模塊、導航解算模塊、數據存儲模塊。
1.2 子系統仿真技術研究
1.2.1 近空間飛行器航跡仿真子系統設計
近空間高超聲速飛行器具有高動態性特點。其對象特性較為復雜,飛行環境與普通亞音速飛行器相比具有很大不同。
本文著重針對近空間飛行器的運動特性進行研究。對近空間飛行器的飛行航跡進行仿真,為慣性導航系統的導航解算提供角速率和加速度參數信息。參考美國X-43A近空間高超聲速驗證機的飛行軌跡[5],設計近空間飛行器的飛行航跡分為3個階段:爬升段、巡航段及俯沖段。
1)爬升段
機載發射爬升段采用姿態角(俯仰角θ)控制方案:

設置飛行器的姿態變化角速率atti_rate實現飛行器的姿態變化,飛行器的加速度acceB來實現飛行器的速度變化。通過改變這兩個參數,改變飛行器的姿態和速度,以使高超聲速飛行器按照預定軌跡飛行。
2)巡航段
近空間高超聲速飛行器在巡航段要求等高等速飛行。理論上,實現等高飛行有兩種飛行方案,即俯仰角θ≡0或者高度H=常值。在近空間飛行器巡航飛行階段,通過調整飛行器姿態角速率,令飛行器的俯仰角為0°,同時加速度保持為0m/s2,則此時飛行器做等高勻速飛行。
3)俯沖段
俯沖段采取與爬升段相同的方案,同樣調整飛行器的俯仰角速率及加速度以改變高超聲速飛行器的姿態和速度。
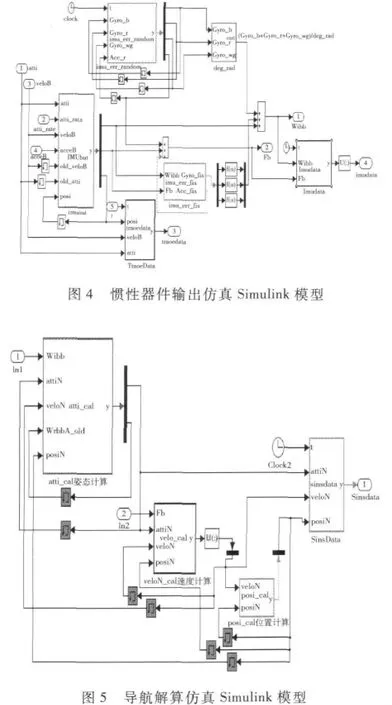
1.2.2 慣性器件仿真子系統仿真設計
捷聯慣性導航系統中,陀螺儀和加速度計的作用是測量飛行器相對于慣性坐標系的轉動角速率和比力。慣性器件仿真系統的任務就是模擬陀螺儀和加速度計,輸出飛行器在不同飛行狀態下的角速率和比力[6~8]。
(1)陀螺儀仿真模型
完整的陀螺輸出數據應包括理想輸出數據、隨機誤差和陀螺儀安裝誤差、刻度因子誤差等確定性誤差,其數學模型如下:


式中為完整的陀螺儀輸出數據;Ka為刻度因子、安裝誤差等確定性誤差;εb為隨機常數誤差;wg為白噪聲誤差;εr為一階馬爾柯夫過程誤差。
1.2.3 導航解算子系統仿真設計
導航解算子系統主要進行姿態、速度、位置更新及地球參數更新。導航解算算法仍采用經典的四元數方法[6]求解姿態轉換矩陣。因子、安裝誤差等確定性誤差;εb為隨機常數誤差;wg為白噪聲誤差;εr為一階馬爾柯夫過程誤差。
(2)加速度計仿真模型
完整的加速度計輸出數據應包括理想輸出數據、隨機誤差和加速度計的安裝誤差及刻度因子等確定性誤差,其數學模型為:
2 Simulink仿真系統實現
2.1 各仿真子系統的實現
參考1.1節系統總體結構圖,利用Simulink實現對近空間飛行器慣導系統的Simulink仿真系統總體模型如圖2所示。
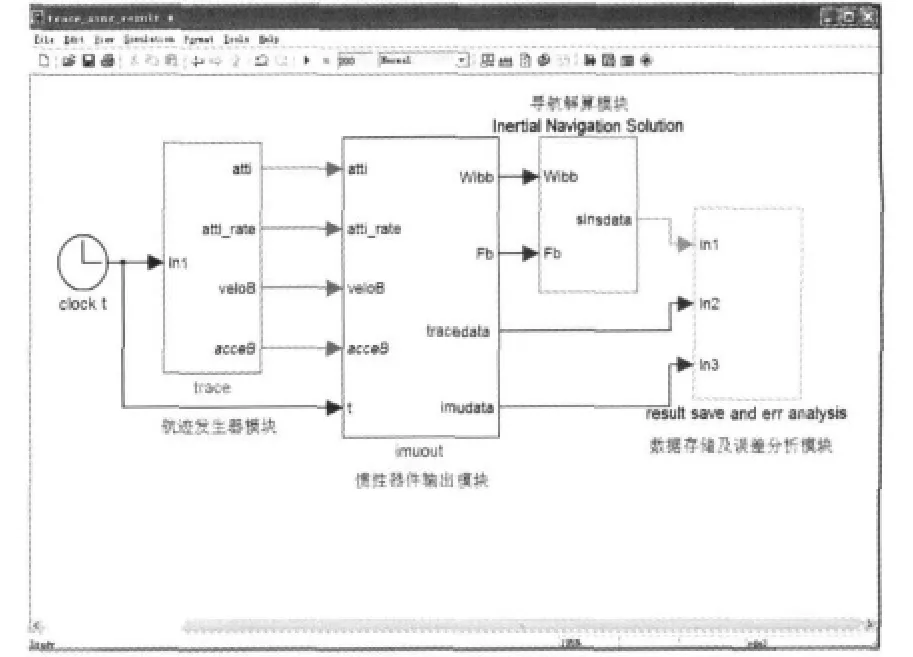
圖2 Simulink仿真系統總體模型
首先由clock模塊提供仿真時間。然后航跡仿真(trace)模塊根據需要產生近空間飛行器的標準飛行軌跡,同時提供模擬慣性器件所需的角速率和加速度信息;慣性器件輸出仿真(imuout)模塊,構建陀螺儀和加速度計模型,模擬陀螺儀和加速度計的輸出;導航解算(Inertial Navigation Solution)模塊通過慣性器件輸出模塊提供的慣性器件輸出對近空間高超聲速飛行器的姿態、速度及位置進行解算,得到近空間高超聲速飛行器的導航結果;數據存儲(save results)模塊是將得到的標準軌跡數據、慣性器件輸出數據及導航結果進行存儲。
下面以航跡仿真子系統為例詳細介紹系統實現過程。按照1.2節的近空間飛行器的航跡仿真設計算法,利用Simulink與M文件實現航跡仿真子系統模型如圖3所示。
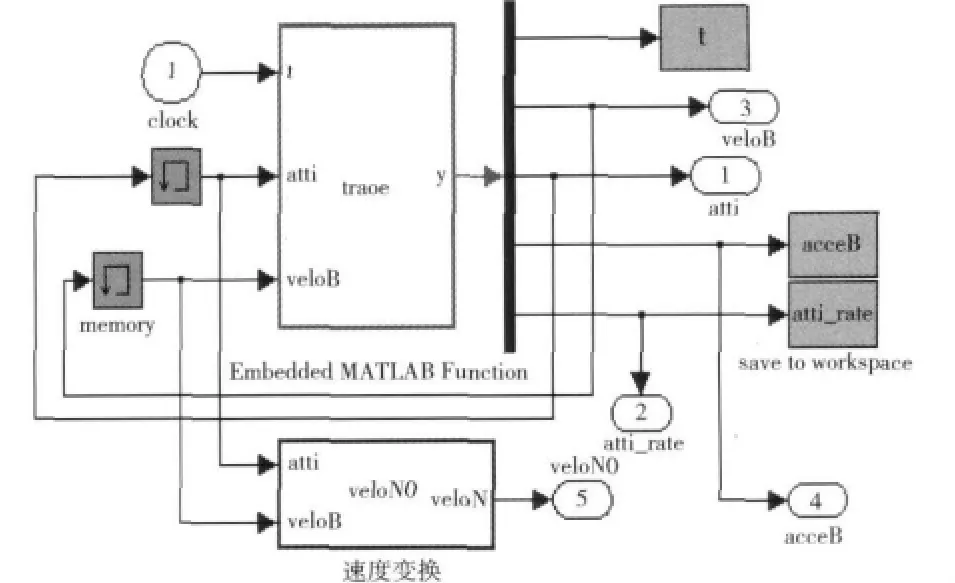
圖3 航跡仿真Simulink模型
使用Simulink模型庫中,用戶自定義函數(User-Defined Functions)模塊中的內嵌式Matlab函數模塊(Embedded MATLAB Function),該模塊允許用戶調用自己編寫的Matlab M文件[9],方便將Simulink模型與M文件連接。將近空間高超聲速飛行器的飛行航跡M文件程序通過該模塊進行封裝,輸入為時間t,飛行器姿態atti和東向飛行速度veloB,輸出為飛行速度veloB、飛行器姿態atti、姿態角速率atti_rate及加速度acceB。圖3中高超聲速飛行器的姿態和速度初值通過memory模塊中的初始條件Initial condition參數給定,當第一次運行時,系統使用memory模塊中設置的初值,第一次運行結束后,系統將得到的姿態(atti)和速度(veloB)通過memory模塊反饋給系統輸入。veloN0將載體系的速度轉化到地理系下。利用to workspace模塊將需要的數據存儲到workspace中,方便查看和分析。
其他模塊的搭建與航跡仿真模塊類似,均利用嵌入式Matlab函數模塊實現M文件與Simulink模型的連接,運用memory模塊實現反饋。其他各子系統的模型如圖4及圖5所示。
數據存儲子系統,主要利用to workspace及to file兩個模塊將得到的航跡數據、慣性器件輸出數據及導航結果數據存儲到工作空間和.mat文件中。此處由于篇幅原因,不再給出模型圖。
2.2 仿真系統的工作流程
仿真系統的工作流程是:
1)時鐘Clock模塊輸出仿真時間t,傳遞給航跡仿真子系統模塊,計算每個仿真時間下的飛行器姿態和速度,同時輸出飛行器的姿態角速率、切向加速度等信息;
2)航跡仿真模塊的輸出做為慣性器件輸出仿真模塊的輸入,經過該子系統的計算得到慣性器件輸出(比力和角速率信息),同時該子系統計算出飛行器的位置信息,存儲航跡數據及慣性器件輸出數據;
3)慣性器件仿真模塊的輸出作為導航解算模塊的輸入,由導航解算模塊進行飛行器姿態、速度及位置的解算,得到導航結果;
4)將導航結果、航跡數據及慣性器件輸出數據通過數據存儲系統存儲。
按上述流程進行仿真,完成對近空間飛行器的慣性導航系統的數學分析及仿真研究。
3 仿真結果與分析
3.1 靜基座條件下慣導系統誤差仿真
陀螺和加速度計的噪聲參數如表1。
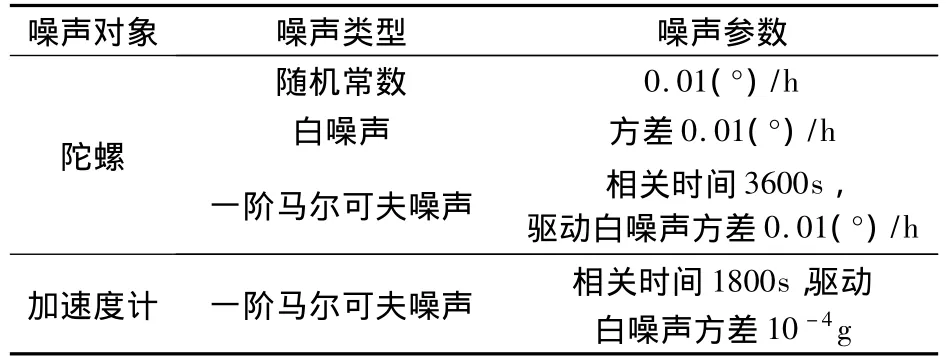
表1 慣性器件隨機噪聲參數
設置近空間高超聲速飛行器慣性導航仿真系統的飛行參數滿足純靜態條件,即:飛行器的飛行速度為0m/s,保持靜止不動,將仿真時間設置為72h,分析此時的飛行器姿態、速度誤差。因為純靜態時天向速度無振蕩特性,故仿真分析東向和北向速度誤差,仿真結果如圖6。

圖6 靜基座條件下飛行器的姿態、速度誤差
陀螺漂移是慣導系統的主要誤差源,它能激勵3種周期的振蕩,即舒勒周期振蕩、地球周期振蕩及傅科周期振蕩。從得到的誤差曲線來看,飛行器的姿態、速度誤差基本呈現振蕩特性,說明該Simulink慣性導航仿真系統是正確的,可以用來進行數學仿真分析。
3.2 近空間飛行器動態航跡仿真
假設高超聲速飛行器下掛在超音速戰斗機上,第100s飛機處于8000m高空,速度達到0.8Ma,飛行器被水平投放,在助推器推動下加速,實現轉彎爬升,助推段共飛行80s。在180s助推器分離,同時調整姿態角,以滿足超燃沖壓發動機點火要求。在第185s超燃沖壓發動機點火,飛行器速度進一步提高,達到5.8Ma,第200s開始在30000m左右高空巡航飛行。在第900s進入俯沖飛行階段,耗時50s[5]。
近空間高超聲速飛行器的初始飛行狀態參數如表2。
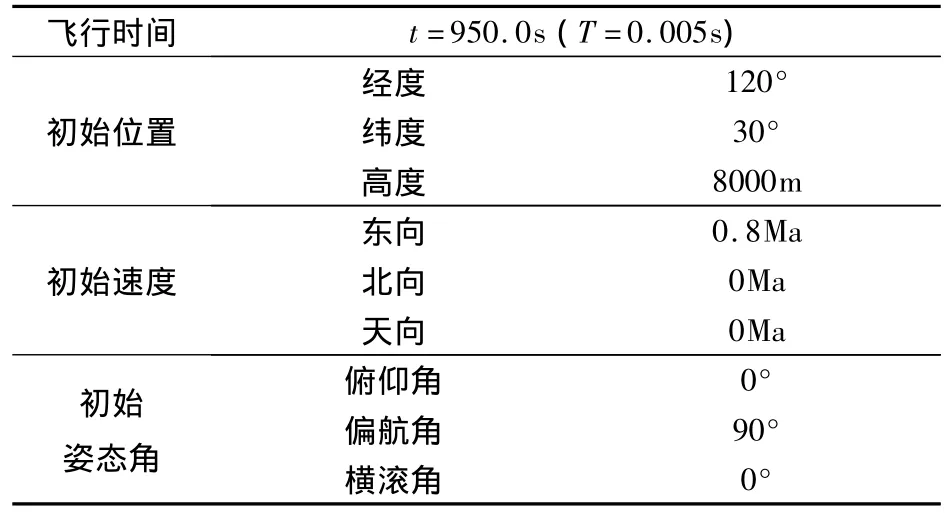
表2 近空間飛行器初始飛行參數
按1.2節的航跡設計方案,為了模擬實際飛行器中存在的各種擾動因素及控制效果,在近空間飛行器的巡航飛行階段,對近空間飛行器的巡航飛行階段的角速率增加小幅隨機誤差。設計動態飛行過程中的控制參數如表3,得到近空間飛行器的飛行軌跡如圖7所示。
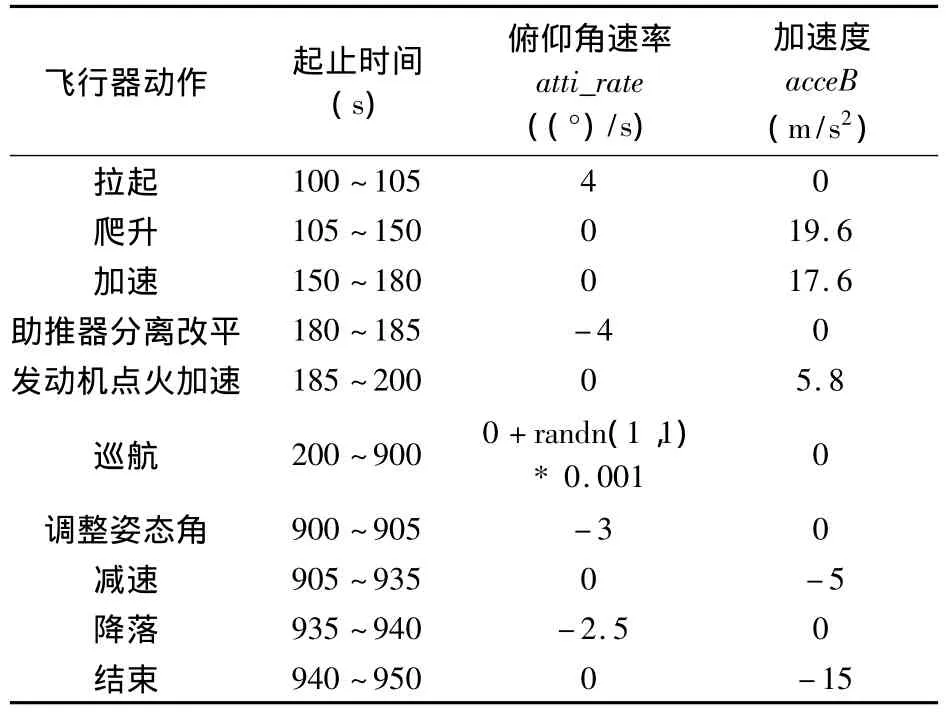
表3 動態飛行過程中航跡參數
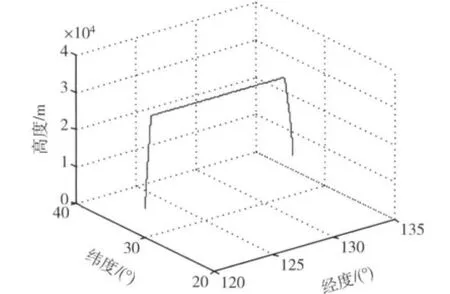
圖7 近空間高超聲速飛行器的全彈道飛行軌跡
3.3 近空間飛行器飛行速度對加速度影響分析
近空間飛行器飛行速度極快,對慣性導航系統的參數必然造成特殊的影響,借助本文搭建的高超聲速飛行器慣性導航Simulink仿真系統,分析了飛行速度對向心加速度及哥氏加速度的影響。
載體相對地球運動,地球又相對于慣性空間運動,因此,對地球而言,載體的慣性加速度包含了相對加速度和哥氏加速度等。慣導系統的比力方程如式(4):

僅考慮近空間高超聲速飛行器的巡航飛行階段,設飛行器東向飛行,飛行時間為200s,飛行器勻速飛行。分析向心加速度和哥氏加速度隨飛行速度的變化情況,仿真結果如圖8。
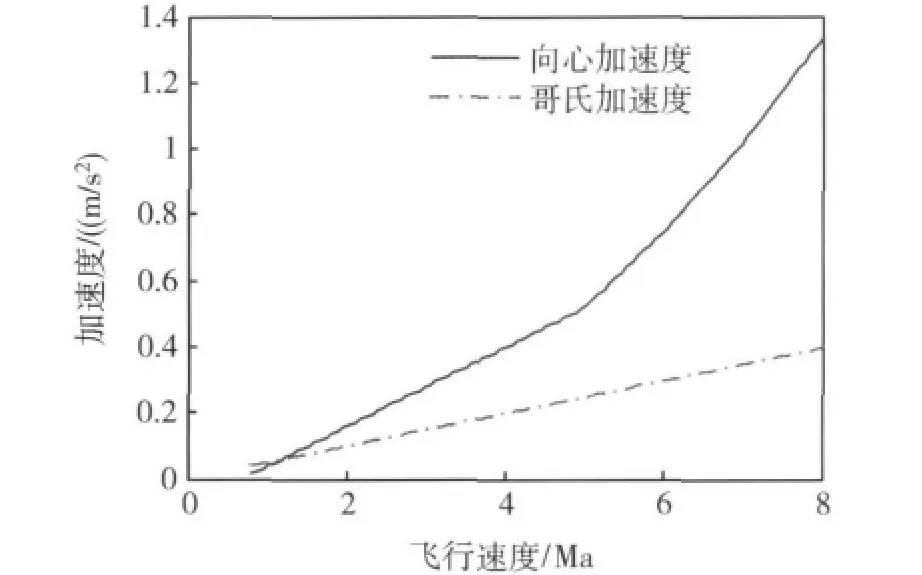
圖8 加速度隨飛行速度變化曲線
將向心加速度及哥氏加速度分別在東向、北向和天向進行投影,分析向心加速度和哥氏加速度占加速度計輸出的比例隨飛行速度的變化情況,仿真結果如圖9。
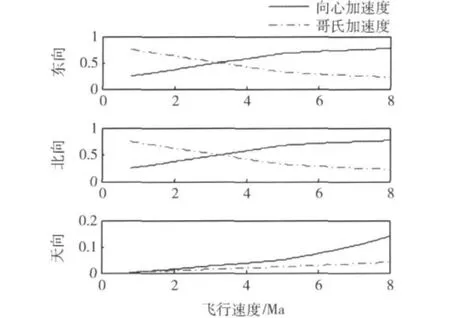
圖9 各項加速度所占比例隨速度變化曲線
由圖8可以看出,隨著速度的增大,向心加速度和哥氏加速度均增大,但是向心加速度相對變化幅度較大。由圖9可以看出,隨著速度的增大,哥氏加速度所占加速度計輸出的比例明顯減小,而向心加速度所占比例隨著高超聲速飛行速度逐漸增大。可見近空間高超聲速飛行器所受的加速度與普通的常規亞音速飛行器相比有明顯的不同。可以從減小慣導誤差的角度來考慮對影響較大的加速度采取一定的補償措施,使慣導系統能夠精度更高,更好的滿足近空間飛行器的高精度要求。
4 結束語
本文通過對近空間高超聲速飛行器的運動特性及慣性導航原理進行分析,完成了對近空間飛行器慣性導航Simulink仿真系統模型的構建。驗證了本文搭建的Simulink仿真系統的正確性,同時利用該仿真系統完成了近空間飛行器的航跡仿真及飛行速度對加速度的影響分析。仿真結果表明,隨著速度的增大,向心加速度和哥氏加速度均增大,向心加速度變化相對較大。同時,哥氏加速度在加速度計輸出中所占的比例隨著速度增大明顯減小,而向心加速度所占比例逐漸增大。近空間高超聲速飛行器所受的加速度與普通的常規亞音速飛行器相比有明顯的不同。本文的研究對近空間飛行器慣性導航系統的研究具有一定的參考意義。
[1]Morelli E A,Derry S D and Smith MS.Aerodynamic Parameter Estimation for the X-43A(hyper-X)from Flight Data[A].In:2005 AIAA Guidance,Navigation,and Control Conference and Exhibit[C].San Francisco,AIAA,2005-5921.
[2]Karlgaard C D,Martin J G,Tartabini P V,et al.Hyper-X Mach 10 Trajectory Reconstruction[C]//2005 AIAA Atmospheric Flight Mechanics Conference and Exhibit,San Francisco,CA,AIAA 2005-5920.
[3]崔璽康.高超音速飛行器前后體優化設計方法研究[D].西安:西北工業大學,2006,5.
[4]陳佳明,張明照,戚紅雨,等.應用MATLAB建模與仿真[M].北京:科學出版社,2001.
[5]Catherine Bahm,Ethan Baumann.The X-43A Hyper-X Mach 7 Flight 2 Guidance,Navigation,and Control Overview and Flight TestResults[J].International Space Planes and Hypersonics Systems and Technolo,AIAA:2005-3275.
[6]劉建業,趙偉,熊智,孫永榮.定位與導航系統[M].南京:南京航空航天大學,2008:15-20.
[7]Jianye Liu,Yanhua Zhu,Rongbing Li.Information Fusion Algorithm for Damping Attitude of Strap-down Inertial Attitude and Heading Reference System Based on Fault Diagnosis[C].International Symposium on GPS/GNSS 2008,Tokyo,Japan November 2008.
[8]劉瑞華,劉建業,孫永榮.多傳感器組合導航系統研究[J].航天控制,2001,19(2):67-72.(Liu Ruihua,Liu Jianye,Sun Yongrong.Study on Multi-Sensor Combined Navigation System[J].Aerospace Control,2001,19(2):67-72.)
[9]薛定宇,陳陽泉.基于 MATLAB/Simulink的系統仿真技術與應用[M].北京:清華大學出版社,2002:192-293.
The Simulink Simulation of the INS on the Near Space Hypersonic Vehicle
PENG HuiXIONG ZhiLIU Jianye WANG Rong
Navigation Research Center of Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China
The near space hypersonic vehicle has strong dynamic features and precise attack capability.The navigation system is the key to ensure the high precision of the vehicle.The inertial navigation system(INS)can provide the all-weather and full-state movement information of the vehicle.And it also takes the advantages of reliability and continuous output.Thus,theINSis the core navigation system of the near space hypersonic vehicle.In this paper,the simulink andM-file are used to establish the inertial navigation system of hypersonic vehicle,and simulation and research are conducted for the system.The simulink model is completed for theINSon the hypersonic vehicle,and the feasibility of the model is verified as well.The tracks of the hypersonic vehicle are simulated,and the effects of the vehicle velocity on the centripetal acceler-ation andCoriolisacceleration are analyzed.The results have reference values for the study of the inertial navigation system on the hypersonic vehicles.
Simulink;INS;Near space hypersonic;Vehicle
TP311.562
A
1006-3242(2012)02-0069-06
*國家自然科學基金資助項目(91016019);航空科學基金資助項目(2011ZC52044);江蘇省高校青藍工程資助項目;江蘇高校優勢學科建設工程資助項目;南京航空航天大學博士學位論文創新與創優基金(BCXJ10-05)
2011-06-07
彭 惠(1988-),女,河北人,碩士研究生,主要從事慣性導航技術研究;熊 智(1976-),男,四川人,博士,研究員,主要從事慣性技術、組合導航及微小衛星姿軌確定技術研究;劉建業(1957-),男,浙江人,教授,博士生導師,主要從事慣性技術、衛星定位、組合導航系統研究;王 融(1984-),男,山西人,博士研究生,主要從事航天小衛星的導航與軌道技術研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
