高速鐵路與鐵路信號第五講 幾個主要技術原則的選擇
2012-07-13 09:27:38傅世善
鐵路通信信號工程技術 2012年1期
傅世善
(北京全路通信信號研究設計院有限公司,北京 100073)
1 車上模式的選擇
從制動曲線的產生分為地面模式和車上模式。
德國LZB系統是基于軌道電纜傳輸的列控系統,是1965年以前開發的系統,是世界上首次實現連續速度控制模式的列控系統,早期探索中國高速列控方案時曾關注過。LZB系統基于能雙向信息傳輸的軌道電纜,信息量有83.5 bit,地面控制中心可以獲得列車性能的重要信息,以地面控制中心為主計算制動曲線后,發送指令傳至車載設備,車上存有多種制動曲線,按地面指令執行。地面控制中心掌握在線所有列車的運行情況,并可以直接指揮列車運行。例如,地面控制中心可能組織前后行駛的列車加減速,以調整追蹤間隔、運行時分和平衡牽引供電網;地面控制中心可以監督列車的制動、速度、故障和司機操作等。我們考察時印象很深的是:司機表演“自動駕駛”,以及列車將設備故障情況報給地面動車段,列車一回段,替換設備和維修者已在站臺等候。
地面模式的車載信號設備相應簡單,但智能化不夠,與其他列控系統兼容比較困難。在早期計算機技術還沒發展到當前水平時,采用地面模式是可以理解的,此模式在城軌交通中也有采用。
中國高速鐵路網廣大,還與普速線互連互通,長途列車較多,要求實現高、普速列車跨線運行。所以CTCS-2級和CTCS-3級均采取車上模式,列車運行速度曲線是車載信號設備根據地面上傳的移動許可和線路數據及列車本身的性能計算的。車載信號設備具有一定的智能化,只要各線路移動許可和線路數據的信息標準化,可以實現系統兼容和跨線運行。
2 線路數據地面提供方式的選擇
CTCS-0級和CTCS-1級采取大貯存的方式把線路數據全部貯存在車載設備中,靠邏輯推斷地址調取所需的線路數據,結合列車性能計算給出目標-距離式制動曲線。CTCS-1級在車站附近增加點式信息設備,傳輸定位信息,以減少邏輯推斷地址產生錯誤的可能性。
日本數字ATC使用575 Hz和675 Hz的頻帶,碼長64 bit,對用戶開放43 bit。將列車控制所需的全部信息都通過鋼軌傳送是不可能的,日本采用變通辦法:在車上數據庫預存閉塞分區的長度、坡道及區間曲線等地面信息,當列車收到地面傳來ATC信息中的軌道電路編碼為地址,從車上數據庫中取出列車控制所必要的固定數據,結合其他編碼信息生成列車控制模式曲線。為了彌補傳輸速率低的缺陷,日本設計了4種編碼。列車壓入本閉塞分區時,首先收到第一種編碼,以判斷確認閉塞分區分界點;經一定時間后自動轉為發送第二種編碼,列車獲得距停車點距離等列車控制信息;本軌道區段內容有變化時,為了及時向車上傳遞,發送2組縮短的第三種編碼或第四種編碼,然后再正常傳送第二種編碼。
采用第一種編碼方式有效控制了分界點的確認,使電氣絕緣誤差控制在10 m以內,安全距離只有50 m。采用第二、三、四種編碼方式,實際上既加快了應變速度,又擴大了信息含量,使列車控制精度較細。軌道電路有編碼也有利于抗干擾。
由此可見,日本采用了數字軌道電路傳輸信息,傳輸速率低,信息量不夠,又要利用軌道電路編碼利于抗干擾,所以采取了車上預存線路數據的方式。日本高速鐵路網相對短小,白天行車,有利于車上數據庫的版本管理和修改,采用車上數據庫預存線路數據的方式是有道理的。
CTCS-2級和CTCS-3級列控系統采取線路數據由地面提供方式。這種方式最大優勢在于一旦地面線路數據因故需要變動,由地面修改,與車上設備無關,這非常適用于國情。我國地域廣大,需要跨局、跨線的長途列車多,又日夜行車,大量列車在線運行,想統一修改車載設備的數據庫是很難的。
CTCS-2級采取由地面應答器提供一個全制動距離范圍內的線路數據,包括每一個軌道區段的坡道、曲線、長度等。由于ZPW-2000A型無絕緣軌道電路只有18個信息量,軌道電路只能提供列車運行前方有若干個軌道區段空閑數來作為移動授權憑證,通過和區段長度數據的計算求得若干個空閑軌道區段總長度,列車到第一個空閑軌道區段始端的距離則由測速測距系統計算后求得,兩者相加就能求得目標距離。車載設備根據地面傳送來的移動許可、線路數據和列車性能計算列車運行速度,若列車接近前方減速點時,即刻生成目標-距離一次制動模式曲線。
CTCS-3級車載設備則是通過無線通信獲得地面傳送來的移動許可和線路數據,車載信號設備根據列車性能計算列車運行速度。若列車接近前方減速點時,即刻生成目標-距離一次制動模式曲線。
3 與制動系統接口方式的選擇
列控車載信號設備判斷列車超速,引發列車制動時,總會有一個車載信號設備與制動系統的接口。在接口方式上歷來有“得電制動”與“失電制動”之爭。例如,車載信號設備與制動系統的接口是一個繼電器,繼電器常態是失磁落下狀態,需要時給電,使繼電器勵磁吸起,引發列車制動,這就稱為“得電制動”;如繼電器常態是勵磁吸起狀態,需要時斷電,使繼電器失磁落下,引發列車制動,這就稱為“失電制動”。如車載信號設備與制動系統的接口采取其他方式,仍然會存在“得電制動”與“失電制動”之意思,其道理是一樣的。
顯然,“失電制動”方式符合傳統的故障-安全理念,任何斷線、斷電、斷信號等常見故障時都會導致“失電制動”,因為制動停車是安全取向。采取分級制動模式時,只有一條模式曲線,列車超速,所謂“撞線”時,會限時引發列車緊急制動。這種方式有點副作用,當遇到常見故障時,司機緊張,旅客受驚,系統的可用性受到影響。
相反,“得電制動”可用性強些,但不符合故障-安全理念, 信號專業人士不易接受。CTCS-0級由通用機車信號+列車運行監控裝置組成,就采取“得電制動”方式。
CTCS-2級和CTCS-3級列控系統的車載設備根據地面傳送來的移動許可和線路數據,車載信號設備根據列車性能計算列車運行速度。若列車接近前方減速點時,即刻生成目標-距離一次制動模式曲線。一次制動模式曲線除緊急制動模式曲線外,還可生成若干條常用制動模式曲線,例,0.7或0.8全制動力的常用制動模式曲線。列車進站停車時采用0.7常用制動模式曲線,旅客舒適性更好。在高速列車時代,應盡量避免使用緊急制動,緊急制動雖確保了列車不會闖過安全點,但旅客難免易受驚或受傷。如圖1所示。
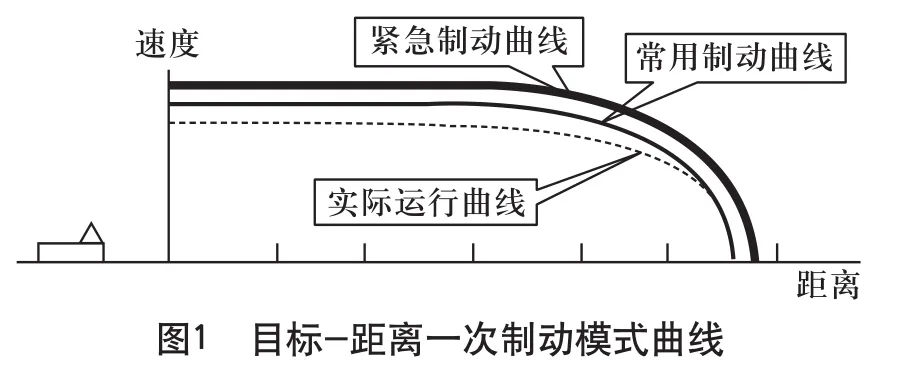
圖1中示意3條曲線。正常情況司機按實際列車運行速度曲線駕駛,一旦超速碰撞常用制動速度曲線時,采取“得電制動”方式,以提高系統的可用性。如繼續超速碰撞緊急制動模式曲線時,采取“失電制動”方式。“得電制動”與“失電制動”的組合運用兼顧了安全性與可用性。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
工業設計(2016年12期)2016-04-16 02:52:00
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
設備管理與維修(2015年12期)2015-04-09 06:57:00