基于C8051F的果樹施藥控制系統設計
2012-07-13 06:28:42房開拓尤麗華
電子設計工程 2012年9期
房開拓,尤麗華
(江南大學 機械工程學院,江蘇 無錫 214122)
水果種植業是我國農業發展的重要組成部分,果樹病蟲害防治作業也越來越被重視[1]。當下我國施藥水平總體偏低,主要表現在自動化技術落后、作業強度大、農藥浪費嚴重等問題[2]。為了解決這一現象,提高果樹施藥噴霧效率和農藥附著率,文中設計了新型噴霧機構及其控制系統,該機構能夠針對不同果樹尺寸來調節噴霧距離。作業人員可以遠距離操作手持式控制器即可調節噴霧參數 (包括每側噴霧頭的開閉、噴霧機構伸縮長度、軸流風機送風轉速等),這在很大程度上降低了勞動強度,提高了施藥效果。
1 系統工作原理
本系統結合了機械和電子技術,由機械部分和控制部分構成。施藥噴霧過程中噴霧頭與冠層的距離要求適中,而果園內的果樹形狀尺寸各異,因此應用了電動推桿作為執行元件安裝于機械系統中;為了增加噴霧頭的射程、提高霧化效果,采用風送式噴霧,將多個噴霧頭置于由軸流風機驅動的轉葉風扇表面;為了調節風機轉速,選用了變頻調速器來適應不同冠層密度的果樹;為了增加作業效率,機械部分采用兩側對稱的形式,可以同時對兩行果樹實施作業;為了操作可靠方便,系統中所有的參數值(噴霧頭的開閉、機構伸縮長度、軸流風機送風轉速、噴霧時間等)都由手持遙控器通過上位機與下位機之間的無線通訊來設定。
針對上述作業工況和技術要求,設計了施藥機構運動簡圖如圖1所示。整個機構固定于拖車尾部底盤上,由機動車牽引該噴霧機構在田間作業,而果樹位于每側噴霧架之中。
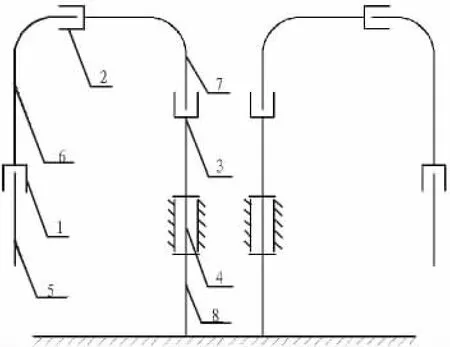
圖1 機構運動簡圖Fig.1 Kinematic diagram of mechanism
在圖1中,機構左右兩側空間上完全對稱,每側各有3個移動副和1個轉動副。單側安裝有4個軸流風機和霧化盤,安裝位置分別位于 5、6、7、8處,每個霧化盤上設置有若干個噴霧頭,機車行進時打開噴霧頭和軸流風機即可實現立體噴霧。針對不同樹高,可以通過調節移動副1配合移動副3來保持噴霧頭與樹冠的距離;而調節移動副2則可以在寬度方向調節噴霧架跨度。轉動副4能夠實現每側機構繞其內側
豎直軸轉動,當系統停止工作時通過轉動副4收起噴霧架,來減小機器的空間尺寸。移動副通過仿形電動執行器來實現。執行器實為一步進電機驅動的絲桿螺母機構,電機旋轉運動轉變為推桿的軸向運動。控制步進電機的正反轉和運行步數即可調節執行器的伸縮量。
2 控制系統硬件設計
根據噴霧作業要求,電控系統需要具備以下功能:驅動電動執行器內步進電機的正反轉,并且推桿能夠按照設定值執行伸縮;驅動液流電磁閥的通斷;通過操作變頻器調節軸流風機的送風速度;可以設定噴霧時間;能夠采用無線通訊方式通過手柄按鍵遠程作業,包括與變頻器的通訊。分析上述控制對象,擬定控制方法,并設計實用的人機界面,得出如圖2所示的控制系統硬件結構圖。
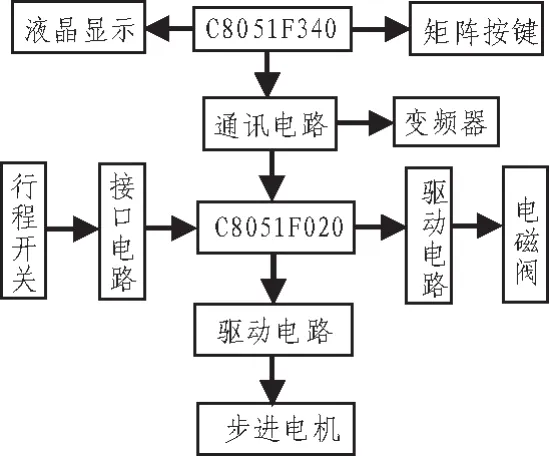
圖2 控制系統硬件結構圖Fig.2 Hardware structure of control system
2.1 微處理器
考慮到控制對象較多、控制精度、和經濟性等因素,微處理器選用新華龍公司C8051F340與具有64個I/O端口的C8051F020單片機分別作為上位機(手持控制器)和下位機(驅動執行元件)控制芯片。C8051F340用于驅動液晶顯示屏、掃描按鍵以及與下位機收發數據來執行相關操作。C8051F020主要任務是在接收到上位機數據后驅動電磁閥、步進電機、變頻器等執行元件,同時檢測電動執行器的行程開關是否到達零位。
C8051F340器件使用Silicon Labs的專利CIP-51微控制器內核。該內核具有標準8 052的所有外設部件,包括4個16位計數器/時器、兩個具有擴展波特率配置的全雙工UART、一個增強型SPI端口、4 352字節的內部RAM、128字節特殊功能寄存器地址空間和40個I/O引腳[3]。C8051F020器件是完全集成的混合信號系統級MCU芯片,具有64個數字I/O引腳;高速、流水線結構的8051兼容的CIP-51內核;64 k字節可在系統編程的FLASH存儲器;硬件實現的SPI、SMBus/I2C和兩個UART串行接口;片內看門狗定時器、VDD監視器和溫度傳感器等[4]。
2.2 人機界面設計
人機界面作為作業人員與控制系統的對話途徑,顯得尤為重要。本設計將液晶顯示屏與按鍵安裝于手持的控制盒內,操作方便靈活,參數能夠任意設定。液晶顯示主菜單和手動工作菜單內容如圖3、圖4所示。界面采用菜單按鍵式,層層進入,進而設定控制對象的相關參數。開機上電后,顯示如圖3所示的主菜單,內容有手動工作、自動工作和停止工作。用戶選擇手動工作按鍵確認后,即可進入如圖4所示菜單,顯示有仿形架伸縮量、風機啟停與轉速、噴霧頭開關等;若對這些參數進行設定,只需選擇相應菜單按確認鍵進入下一層菜單然后通過按鍵輸入設定參數值即可。
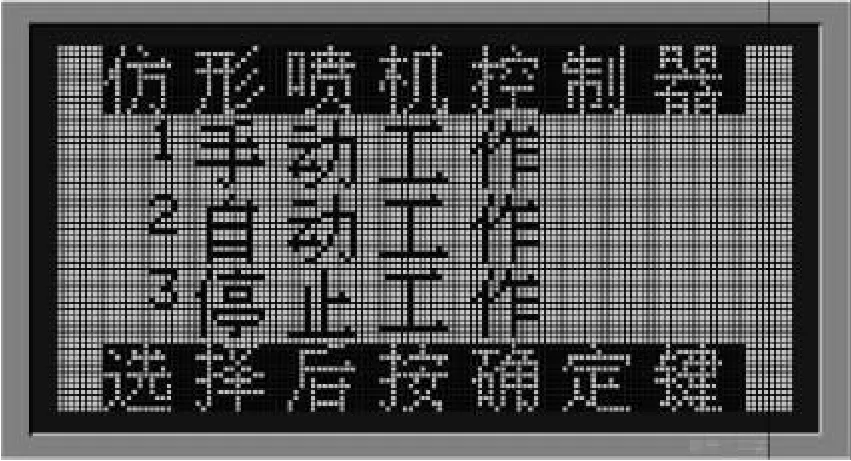
圖3 主菜單Fig.3 Main menu
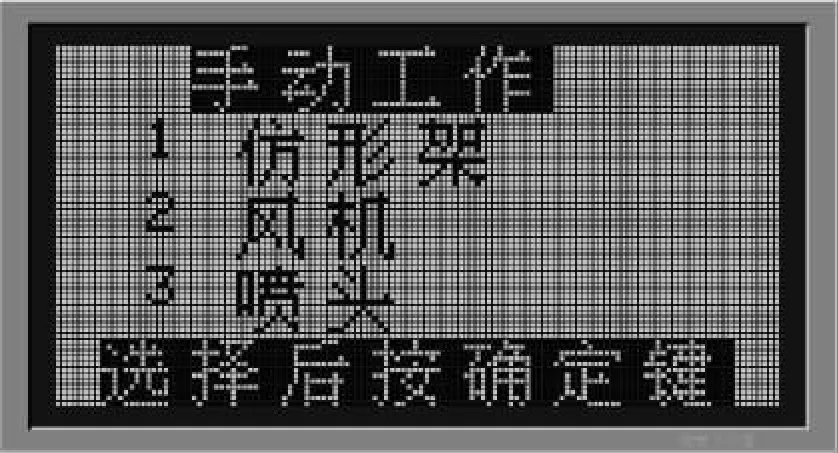
圖4 手動工作菜單Fig.4 Manual-working menu
3 系統的軟件實現
3.1 變頻器通訊
噴霧系統中的送風方式是使用由變頻器控制的軸流風機,每個電機的功率為370 W。左右兩側完全對稱的結構都裝有4個電機,每側電機由一個變頻器驅動。為了滿足要求,本文選用型號為VFD022M21A的臺達三相變頻器,功率為2.2 kW。該變頻器具有高功能、超低噪音和迷你型特點,體積很小,兩個方便安裝于控制箱內,外形美觀[5]。
變頻器內置RS-485串聯通訊界面,通過RS-485通訊方式與單片機交換數據。該變頻器使用MODBUS通訊協議的RTU模式來進行數據傳輸。在變頻器面板上P92中輸入“03”,將變頻器設置為Modbus RTU模式,數據格式為<8,N,2>,指的是該字符結構包括8個數據位,1個開始位和2個停止位,共11個字符框,如圖5所示[5]。
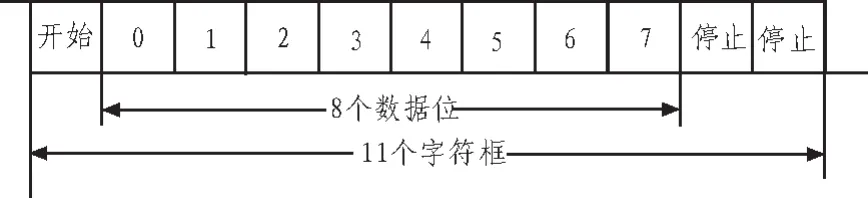
圖5 RTU模式的字符結構Fig.5 Data structure of RTU mode
噴霧風送強度的調節過程就是通過向變頻器寄存器連續寫入多個數據,來對其有效控制,例如向右側噴霧頭的變頻器(地址為01H)連續寫入多個數據的命令碼為10H,其命令信息如表1所示[5]。
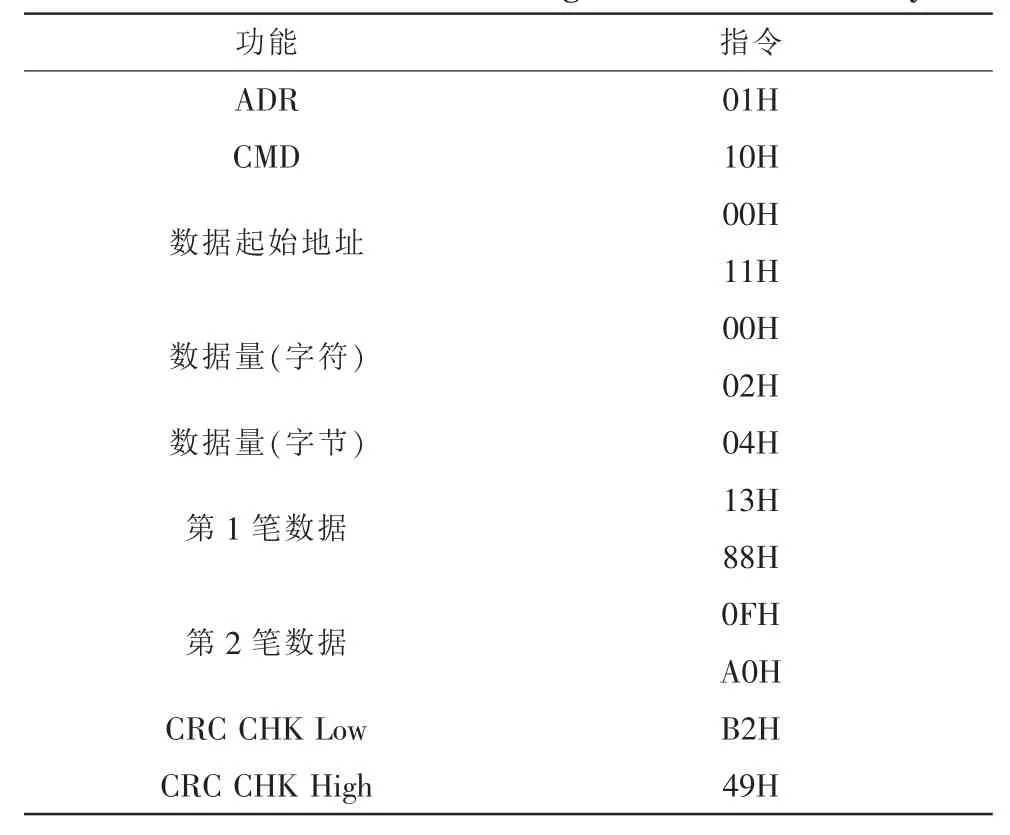
表1 連續寫入多個數據的命令Tab.1 Command of writing more data continuously
3.2 電動執行器驅動程序設計
控制電動執行器實質上就是控制其內部的步進電機的運轉,控制目標就是要根據作業人員的需要使得步進電機的正反轉及其轉動的步數。
下位機接收到上位機發送的數據后,則判斷要執行的任務種類。如果是電機運行任務,繼續分析接收到的數據,提取電機正反轉及其轉動步數信息。若要求電機電機反方向轉動就要通過單片機控制引腳高低電平設定為反向轉動。獲得步數數據后實施變頻率的分別驅動電機加速、勻速、減速運行。例如要求推桿向前伸長量為L,計算出電機運轉步數為N,加速步數為 N0,減速步數為 N1,勻速步數為(N-N0-N1)步。 執行器驅動子程序流程圖如圖6所示。
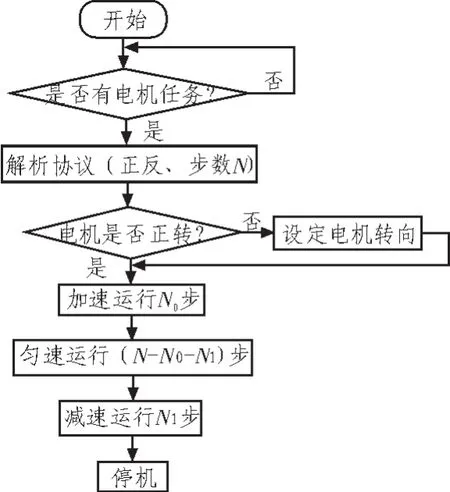
圖6 電動執行器驅動流程圖Fig.6 Flow chart of driving electric actuator
3.3 上位機軟件設計
系統軟件程序模塊主要有液晶顯示模塊、矩陣按鍵掃描模塊數據收發模塊、數據存儲模塊等[6]。開機后,C8051F340先進行系統初始化操作,設定系統的工作條件,包括單片機引腳端口、系統時鐘、中斷入口和串行接口等。進入主程序后,設置串口中斷寄存器和定時器中斷寄存器,打開中斷開關;對于液晶顯示屏,首先要輸入清屏指令,然后默認顯示主菜單;此時需要進入數據存儲模塊,執行讀上次存入FLASH中的數據,然后通過485通訊方式發送至C8051F020;掃描矩陣按鍵,判斷需要進入的菜單序號,顯示子菜單。進入每一層菜單后繼續掃描按鍵來進行在此頁面下的顯示變化,包括開關顯示、風機轉速顯示和電動執行器伸出量顯示等。程序流程圖如圖7所示。
4 實驗結果
文中主要設計了針對果樹不同形狀實施自動噴霧的操作控制系統,該系統能夠使得施藥作業人員方便有效地遠程控制噴霧參數,并采用了裝有液晶顯示屏和按鍵的面板式手持控制器,人機界面較為和諧,如圖8、圖9所示。

圖8 手持操作器Fig.8 Handheld operator

圖9 控制箱Fig.9 Controlling instrument
5 結 論
經過在實驗室內對通訊模塊、電機驅動模塊、按鍵掃描模塊的模擬調試后,控制系統在軟件上可以有效控制了變頻器、電動推桿以及電磁閥等執行元件。針對現場調試中存在變頻器對通訊干擾的問題,采取了增加電源濾波器、遠離干擾源等手段,使得控制器能夠可靠地工作。試驗表明,本施藥系統大大提高了工作效率,減小了作業強度。
[1]張毅.加入WTO后我國水果企業應對戰略[J].西安郵電學院學報,2004(7):74-77.
ZHANG Yi.Fruit enterprise strategy of country after entering WTO[J].Xi’an Post and Telecommunications College Journal,2004(7):74-77.
[2]郭輝,崔海民.果園植保機械現狀與發展研究[J].農業技術與裝備,2009(5):34-35.
GUO Hui,CUI Hai-min.Research on orchard eppo machinery situation and development[J].Agriculture Technology&Equipment,2009(5):34-35.
[3]新華龍有限公司.C8051F340全速USB FLASH微控制器數據冊[EB/OL].(2006-01).http://www.waveshare.net/datasheet/SILABS_PDF/C8051 F340.PDF.
[4]新華龍有限公司.C8051F340全速USB FLASH微控制器數據冊[EB/OL].(2006-01).http://www.waveshare.net/datasheet/SILABS_PDF/C8051 F02x.PDF.
[5]中達電通股份有限公司.臺達VFD-M使用手冊[EB/OL].(2008-05).http://www.szbianpinqi.cn/down/VFD-M.pdf.
[6]陸瑤成,李唐,尤麗華,等.自學習熱轉印機控制系統設計[J].電子設計工程,2011,19(23):120-123.
LU Yao-cheng,LI Tang,YOU Li-hua,et al.Research on controller ofself-learning thermaltransfer printer[J].Electronic Design Engineering,2011,19(23):120-123.
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
防爆電機(2020年3期)2020-11-06 09:07:42
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
測控技術(2018年5期)2018-12-09 09:04:50
電子制作(2017年7期)2017-06-05 09:36:13
故事大王(2016年7期)2016-09-22 17:30:08
自動化博覽(2014年12期)2014-02-28 22:34:39
河南科技(2014年18期)2014-02-27 14:14:58
河南科技(2014年11期)2014-02-27 14:09:59
