一種有源RFID局域定位系統(tǒng)設(shè)計
2012-07-13 03:07:06王建偉
電子設(shè)計工程 2012年5期
張 穎, 李 凱, 王建偉
(1.上海海事大學(xué) 信息工程學(xué)院,上海 201306;2.上海真灼電子技術(shù)有限公司 上海 201100)
隨著社會的發(fā)展,定位技術(shù)越來越受到關(guān)注。現(xiàn)有的定位技術(shù)如GPS定位,紅外定位等,考慮到精度,成本,可行性等方面,都有一定的局限性,尤其是在一些屏蔽物遮擋的局域定位的場合。射頻識別(RFID)定位技術(shù)以其非接觸、高靈敏度和低成本等優(yōu)點,在這種場合下成為一種重要技術(shù)選擇,受到人們越來越多的關(guān)注[1]。
在多標(biāo)簽定位系統(tǒng)中必然會出現(xiàn)多個標(biāo)簽同時與讀寫器通信產(chǎn)生信號碰撞的情況。目前RFID多標(biāo)簽防碰撞算法有多種:多址技術(shù)、ALOHA防碰撞算法[2]、二進(jìn)制防碰撞算法等。多址防碰撞算法是以增加系統(tǒng)的復(fù)雜性和提高成本為代價,且有無法克服的缺陷;ALOHA防碰撞算法有時會導(dǎo)致讀寫器出現(xiàn)錯誤判斷,對某個標(biāo)簽是否在讀寫范圍內(nèi)產(chǎn)生誤判,同時還存在沖突概率較大的問題;簡單的二進(jìn)制防碰撞算法有時并不能夠取得很好的避碰效果。文中采用基于序列號對時隙數(shù)運算的排序算法,該算法可以克服上述誤判的問題,并且易于實現(xiàn)、效率高、軟件編寫簡單,可以不受標(biāo)簽數(shù)量的限制,是一種穩(wěn)定可靠、實用性強的防碰撞算法。RFID定位算法有:LANDMARC[3]、基于信號達(dá)到角度的定位法(AOA)等,這里采用圓周定位算法,該方法簡單可靠,易于在線實施,且具有一定定位精度。
1 系統(tǒng)結(jié)構(gòu)設(shè)計
本系統(tǒng)主要由讀寫器和有源標(biāo)簽組成。讀寫器與標(biāo)簽之間的射頻信號通過空間耦合實現(xiàn)無接觸信息傳遞,讀寫器通過與標(biāo)簽的無線通信,獲得接收信號強度指示(RSSI)值[4],這是對待定位標(biāo)簽進(jìn)行位置計算的重要參數(shù)。微控制器PIC16F877A[5-6]控制CC2500射頻收發(fā)模塊的數(shù)據(jù)發(fā)送與接收[7-8]。讀寫器網(wǎng)關(guān)節(jié)點可通過RS232接口與上位機相連。系統(tǒng)結(jié)構(gòu)框圖如圖1所示。
讀寫器與標(biāo)簽的控制模塊均采用Microchip公司的8位高性能、低功耗微控制器PIC16F877A作為主控芯片,它在架構(gòu)上采用哈佛總線結(jié)構(gòu),數(shù)據(jù)總線和指令總線分離,便于實現(xiàn)全部指令的單字節(jié)化,單周期化,從而有利于提高CPU執(zhí)行指令的速度。此外,片上數(shù)據(jù)存貯空間比較大,充足的存儲空間,可以方便通信協(xié)議棧的設(shè)計與實現(xiàn)。內(nèi)部看門狗定時器,提高了程序執(zhí)行的穩(wěn)定性;低功耗休眠模式,大大降低了系統(tǒng)的功耗。它具有驅(qū)動能力強、外接電路簡潔、功耗低等特點。因此適合于作為RFID讀寫器的控制器來使用。
射頻收發(fā)器選用CC2500[7-8]作為控制芯片,CC2500集成了一個數(shù)據(jù)傳輸可達(dá)500 kbps的高度可配置的調(diào)制解調(diào)器,大大加強了數(shù)據(jù)傳輸?shù)男阅埽瑫r通過開啟集成在調(diào)制解調(diào)器上的前向誤差校正選項,使性能得到大幅度提升。MCU通過SPI接口向CC2500發(fā)送操作命令,配置其調(diào)制方式、工作頻率等參數(shù),通過指令將其配置為接收狀態(tài)、發(fā)送狀態(tài)、空閑狀態(tài)或休眠狀態(tài)。CC2500的引腳SO和SI分別為數(shù)據(jù)傳輸?shù)妮敵龊洼斎胄盘柧€,CSN為片選信號引腳,SCLK為時鐘信號引腳。當(dāng)其接收到一個數(shù)據(jù)或發(fā)送完一個數(shù)據(jù),都會通過引腳GDO0和GDO2輸出相應(yīng)的狀態(tài)脈沖,MCU據(jù)此來判斷CC2500的狀態(tài),從而決定對CC2500的下一步操控。微控制器PIC16F877A和CC2500收發(fā)器模塊的連接如圖2所示。
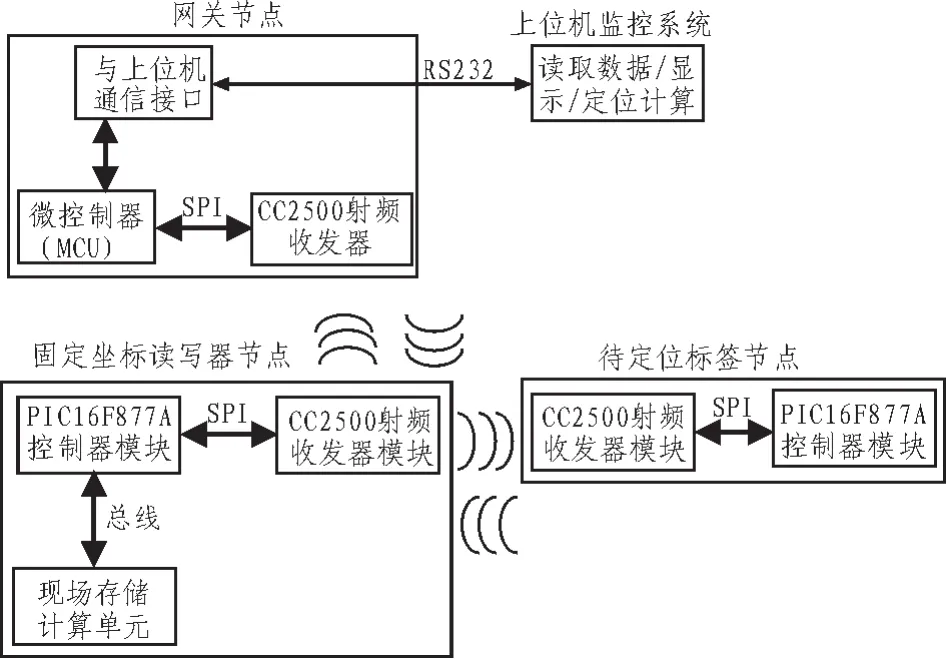
圖1 系統(tǒng)結(jié)構(gòu)框圖Fig.1 Structure of the system
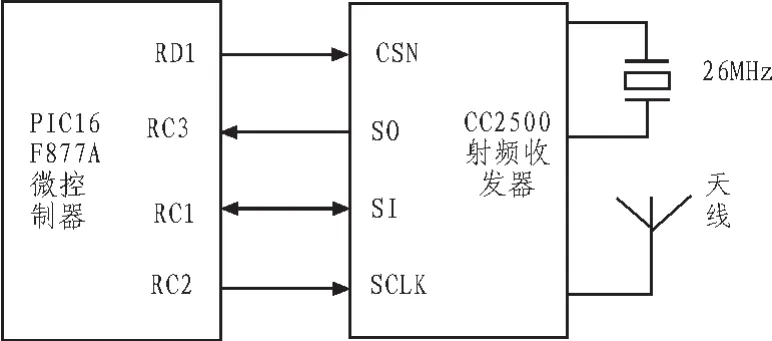
圖2 微控制器與收發(fā)器之間的SPI接口連接圖Fig.2 SPI interface between MCU and transceiver
2 多標(biāo)簽識別防碰撞算法設(shè)計
定位系統(tǒng)涉及多個標(biāo)簽與讀寫器之間的實時通信,需要解決多標(biāo)簽識別信號碰撞問題。基于序列號對時隙數(shù)運算的排序算法具有算法[9]易于實現(xiàn)、響應(yīng)速度快、執(zhí)行效率高等特點,是時分復(fù)用方法的一種。利用微控制器PIC16F877A通過SPI接口來控制CC2500數(shù)據(jù)的發(fā)送時隙,將標(biāo)簽作為應(yīng)答器,基于序列號對時隙數(shù)運算的排序算法的實現(xiàn)流程如下:在爭用周期內(nèi),首先利用標(biāo)簽序列號除以爭用周期時隙數(shù)所得的余數(shù)來確定標(biāo)簽在爭用數(shù)據(jù)幀內(nèi)的發(fā)送時隙;然后利用標(biāo)簽序列號除以爭用周期時隙數(shù)所得的商確定標(biāo)簽在爭用幀內(nèi)相應(yīng)時隙的發(fā)送位,然后在爭用周期內(nèi)發(fā)送的爭用數(shù)據(jù)幀的相應(yīng)時隙發(fā)送位填充數(shù)據(jù)“1”;最后利用填充過的爭用數(shù)據(jù)幀確定標(biāo)簽在整個數(shù)據(jù)發(fā)送周期內(nèi)的發(fā)送順序(即標(biāo)簽的發(fā)送順序 =其發(fā)送位及其前面各發(fā)送位中 “1”的總數(shù)),從而給不同序列號的標(biāo)簽分配不同的發(fā)送時序。本設(shè)計用了9個待定位標(biāo)簽,利用上述算法進(jìn)行標(biāo)簽識別排序,具體流程如圖3所示(這里的應(yīng)答器指標(biāo)簽應(yīng)答器)。

圖3 基于序列號對時隙數(shù)運算的排序算法Fig.3 Sorting algorithm based on operations of serial number to the number of time slots
圖3倒數(shù)第二行為9個標(biāo)簽的發(fā)送時序,發(fā)送的時序是A0,A4,A8,A1,A5,A2,A6,A3,A7。 這樣這 9 個標(biāo)簽就可以保證無碰撞地被讀寫器識別,這種多標(biāo)簽防碰撞沖突是多標(biāo)簽定位系統(tǒng)能夠正常工作的前提。
3 定位算法設(shè)計
本系統(tǒng)采用的定位算法是圓周定位法,圓周定位法是利用讀寫器接收標(biāo)簽信號得到RSSI值,通過相關(guān)的定位計算公式來進(jìn)行定位的一種方法。
無線信號的接收信號強度和信號傳輸距離的關(guān)系可以用式(3)來表示[10],其中RSSI是接收信號強度,d是收發(fā)節(jié)點之間的距離,n是信號傳播因子,EAF是環(huán)境因子。

由式(1)中可以看出,射頻參數(shù)A和n的值決定了接收信號強度和信號傳輸距離的關(guān)系。A和n用于描述通信操作環(huán)境。射頻參數(shù)A被定義為dbm,表示距發(fā)射機1 m時接收到信號平均能量的絕對值,如平均接收能量是-10 dbm,那么參數(shù)A就被定義為10。射頻參數(shù)n指出了信號能量隨著到收發(fā)器距離增加而衰減的速率,其數(shù)值的大小取決于無線信號傳播的環(huán)境。通過大量的比較和驗證,得到實際應(yīng)用場合環(huán)境因子EAF的大概值為13.5,A取 45,n取3.5。依據(jù)式(1)可得到待定位標(biāo)簽到讀寫器的直線距離,r表示讀寫器與待定位標(biāo)簽之間的距離,即r=d。3個讀寫器的位置已知,分別是 p1(x1,y1),p2(x2,y2),p3(x3,y3)。 則待定位標(biāo)簽的坐標(biāo)計算如式(2)所示:
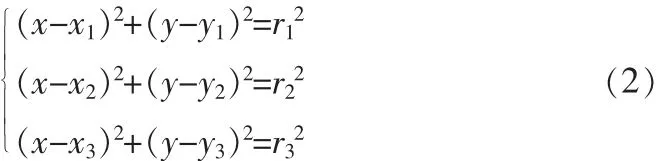
由式(2)可以計算出標(biāo)簽的坐標(biāo)位置為:

三邊定位的示意圖如圖4和圖5。

圖4 三邊定位的理想情況Fig.4 Trilateral positioning in ideal situation

圖5 三邊定位的實際情況Fig.5 Trilateral positioning in actual situation
實驗中將 3 個讀寫器放在坐標(biāo)為(2,2),(2,4),(4,4)的位置上,分別依次對9個待定位標(biāo)簽進(jìn)行定位實驗。9個待定位標(biāo)簽放在4 m×4 m的正方形區(qū)域內(nèi),相鄰的待定位標(biāo)簽相互之間相隔2 m,具體布置如圖6所示。
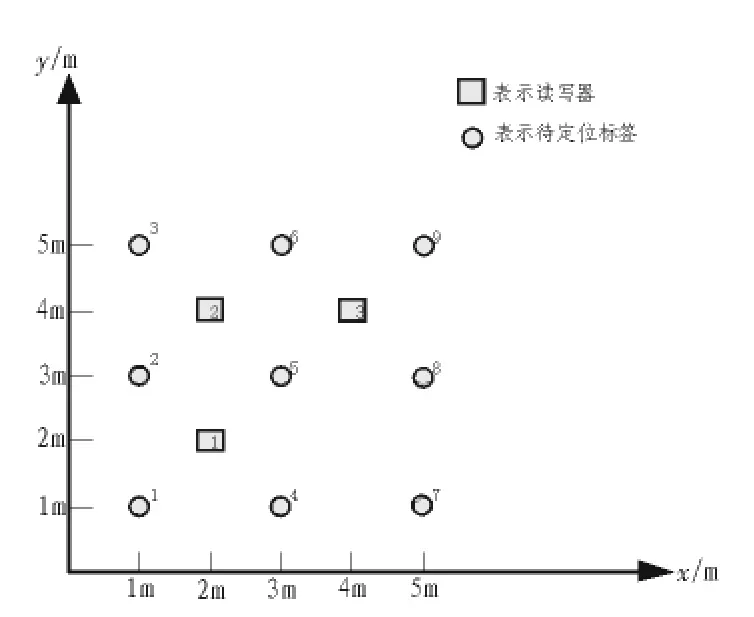
圖6 定位實驗中讀寫器和標(biāo)簽放置的位置Fig.6 Placement of readers and tags in positioning experiment
分別對每個標(biāo)簽到讀寫器的RSSI值測試20次,并記錄其數(shù)據(jù),通過上述圓周定位算法對得到的RSSI值進(jìn)行處理,得到各個待定位標(biāo)簽的坐標(biāo)值,實驗結(jié)果如圖7所示。
圖7中圓圈表示標(biāo)簽的理論位置,星點表示標(biāo)簽的定位位置,每一個標(biāo)簽定位實驗20次。從圖中可以看出每個區(qū)域的20個星點都圍繞在圓圈附近,說明定位位置相比于理論位置存在定位誤差。分別對9個標(biāo)簽點的20次定位測試結(jié)果進(jìn)行均方差統(tǒng)計,均方差的范圍在0.236~0.541之間。

圖7 定位實驗結(jié)果圖Fig.7 Result of positioning experiment
4 結(jié)束語
文中介紹了一種基于低功耗微控制器PIC16F877A和收發(fā)器CC2500的RFID局域定位系統(tǒng)設(shè)計方法,介紹了硬件模塊系統(tǒng)的設(shè)計方法;利用基于序列號對時隙數(shù)運算的排序算法解決了多標(biāo)簽識別的防碰撞問題;利用圓周定位算法對待定位標(biāo)簽進(jìn)行了局域定位。實驗表明該設(shè)計方法及算法能夠在多標(biāo)簽狀態(tài)下完成一定精度的實時定位,驗證了該局域定位方法的可行性。
[1]譚明,劉禹.RFID技術(shù)系統(tǒng)工程及應(yīng)用指南[M].北京:機械工業(yè)出版社,2007.
[2]馬劍波.RFID系統(tǒng)防碰撞算法研究[D].北京:北京交通大學(xué),2006.
[3]Ni L M,Liu Y H,Lau Y C,et al.LANDMARC:Indoor location sensing using active RFID[C]//Proceedings of the First IEEE International Conference,2003:407-415.
[4]Awad A,F(xiàn)runzke T,Dressler F.Adaptive distance estimation and localization in WSN using RSSI Measures[C]//10th Euromicro Conference on Digital System Design Architectures, Methods and Tools,2007:471-478.
[5]Microchip.PIC16F87XA Data Sheet[EB/OL].(2001).http://www.microchip.com/downloads/en/DeviceDoc/30292.pdf.
[6]夏彬彬,任明全,屈金學(xué).PIC單片機常用模塊與綜合系統(tǒng)設(shè)計實例精講[M].北京:電子工業(yè)出版社,2009.
[7]Texas Instruments.CC2500 Datasheet[R],2007.
[8]劉振文,鄧毅華,彭友斌.基于CC2500的2.45GHz RFID系統(tǒng)設(shè)計[J].測控技術(shù)與儀器儀表,2008(1):76-78,81.
LIU Zhen-wen,DENG Yi-hua,PENG You-bin.Design of 2.45GHz RFID system based on CC2500[J].Measurement Control Technology and Instruments,2008(1):76-78,81.
[9]王曉華,周曉光,孫百生.射頻識別系統(tǒng)中的防碰撞算法設(shè)計[J].北京郵電大學(xué)學(xué)報,2007,30(2):59-62.
WANG Xiao-hua,ZHOU Xiao-guang,SUN Bai-sheng.The design of anti-collision algorithm in RFID system[J].Journal of Beijing University of Posts and Telecommunications,2007,30(2):59-62.
[10]石為人,熊志廣,許磊.一種用于室內(nèi)人員定位的RSSI定位算法[J].計算機工程與應(yīng)用,2010,46(17):232-235.
SHI Wei-ren,XIONG Zhi-guang,XU Lei.In-building RSSI-based user localization algorithm[J].Computer Engineering and Applications,2010,46(17):232-235.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國生殖健康(2019年3期)2019-02-01 06:12:26
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(2015年3期)2015-11-11 17:20:00
