基于靜力平衡原理的三維均質(zhì)實體測量方法
2012-07-25 04:00:46甘勇
中國機(jī)械工程 2012年11期
甘 勇
桂林電子科技大學(xué),桂林,541004
0 引言
隨著現(xiàn)代制造技術(shù)、快速原形制造技術(shù)和反求工程技術(shù)的快速發(fā)展,研究開發(fā)高精度、低成本的三維實體無損測量技術(shù)有著越來越重要的現(xiàn)實意義。目前的三維實體測量方法主要有有損測量和無損測量兩種,有損測量方法測量精度較高,但其測量速度慢、測量時間長,測量時要破壞被測零件,故測量成本較高,應(yīng)用受到限制。目前應(yīng)用較多的無損測量方法是光學(xué)測量方法,但該方法無法測量物體的內(nèi)部輪廓,存在光學(xué)測量的盲點(diǎn),且測量所得的數(shù)據(jù)點(diǎn)云龐大,雜亂無序,有的甚至殘缺不全;另外,現(xiàn)有核磁共振成像和CT掃描方法能夠測量物體的內(nèi)部輪廓,但這兩種方法的成本很高,對可測零件的尺寸有限制,測量精度低,特別是對被測實體的材料有限制[1-2]。目前基于浮力的三維測量方法可無損測量不溶于液體的均質(zhì)實體,測量精度較高,能測量含有復(fù)雜內(nèi)部輪廓的實體,但對于內(nèi)部輪廓與外部不相通的均質(zhì)實體也無法測量,且測量精度和可靠性受到液體的動態(tài)特性和不穩(wěn)定性的影響[3-4]。國內(nèi)外學(xué)者雖然在三維實體的測量技術(shù)方面做了大量的研究工作,也取得了不少的理論研究成果,并基于其研究成果開發(fā)了不少的工業(yè)產(chǎn)品,但到目前為止,還沒有找到一種理想的三維實體的無損檢測方法。針對這一技術(shù)難題,本文提出了一種基于靜力平衡原理的三維實體無損檢測方法,本方法應(yīng)用分層原理,通過測量平衡系統(tǒng)中各力的變化值,根據(jù)空間力系平衡原理,推算出被測實體每層的質(zhì)量及層中各微小單元體的質(zhì)量和空間坐標(biāo),能對具有復(fù)雜內(nèi)部輪廓的實體進(jìn)行三維測量。
1 測量方法總體方案設(shè)計
在物體三維空間單元表示法中,空間單元體將空間分割成均勻的立方形網(wǎng)格,可以根據(jù)實體所占據(jù)的網(wǎng)格位置來定義物體的形狀和大小。若此位置為物體所占據(jù),即單元被填充,其質(zhì)量視為單元質(zhì)量1,稱為實單元體;反之,空單元體以0表示。基于空間單元表示法研究均質(zhì)實體,構(gòu)建計算模型,可視其由單元正方體構(gòu)成,采用基于二進(jìn)制像素的三維重構(gòu)方法,可取實單元體的質(zhì)量為1,空單元體的質(zhì)量為0,即所有像素值只能在(0,1)2個可能的離散值中選取,以此來表達(dá)空間圖像單元體的有無[5-6]。本文測量方法根據(jù)杠桿平衡系統(tǒng)中力的變化實現(xiàn)無損分層測量,以杠桿平衡系統(tǒng)中力與力矩平衡和其與實體重量的關(guān)系為基礎(chǔ),通過按一定方向越過支點(diǎn)微小位移,測量杠桿平衡系統(tǒng)中實體每個不同位置的受力變化大小,求解被測實體各片層的質(zhì)量和相應(yīng)片層的重心坐標(biāo)值。建立各片層質(zhì)量和所含微小單元體的方程組及重心坐標(biāo)方程組,通過智能計算求解方程組,獲得各單元體的質(zhì)量和其空間坐標(biāo)值,進(jìn)而對獲得的點(diǎn)云數(shù)據(jù)進(jìn)行圖像重構(gòu)。根據(jù)測量需求設(shè)計的總體方案原理圖如圖1所示,其測量系統(tǒng)主要由杠桿平衡系統(tǒng)、精密測力系統(tǒng)、裝夾系統(tǒng)、精密運(yùn)動系統(tǒng)及計算機(jī)組成。
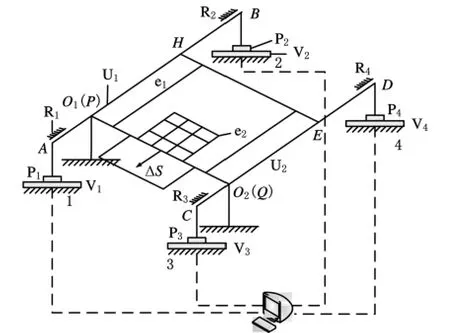
圖1 三維均質(zhì)實體無損測量方法原理圖
杠桿平衡系統(tǒng)包括均質(zhì)杠桿U1和U2、支撐平臺e1和4個自動配重系統(tǒng) P1、P2、P3、P4;杠桿U1的支點(diǎn)O1和杠桿U2的支點(diǎn)O2對稱平衡地設(shè)置在相應(yīng)的杠桿上;支撐平臺e1與上述杠桿U1和杠桿U2之間通過4個固定力接觸點(diǎn)P、Q、H和E相連接;其中,固定力接觸點(diǎn)P和固定力接觸點(diǎn)H位于杠桿U1上,且固定力接觸點(diǎn)P與杠桿U1的支點(diǎn)O1重疊;固定力接觸點(diǎn)Q和固定力接觸點(diǎn)E位于杠桿U2上,且固定力接觸點(diǎn)Q與杠桿U2的支點(diǎn)O2重疊;固定力接觸點(diǎn)P和固定力接觸點(diǎn)Q的連線與兩杠桿U1和U2均垂直;固定力接觸點(diǎn)H和固定力接觸點(diǎn)E的連線也與兩杠桿U1和U2均垂直;支撐平臺e1在系統(tǒng)中本身的重力及力矩已知不變,并可以通過杠桿系統(tǒng)平衡掉;杠桿U1和杠桿U2的4個端點(diǎn)A、B、C和D上分別固定懸掛有一自動配重系統(tǒng)P1、P2、P3和P4。杠桿平衡系統(tǒng)快速調(diào)節(jié)杠桿U1和U2的平衡穩(wěn)定,保護(hù)支點(diǎn)結(jié)構(gòu),維持系統(tǒng)平衡。為了提高測量精度,實現(xiàn)杠桿系統(tǒng)的快速穩(wěn)定,以及保護(hù)精密測力儀器,杠桿U1和U2的4個端點(diǎn)A、B、C、D處各設(shè)有一限位器R1、R2、R3和R4。杠桿平衡系統(tǒng)的4個測力系統(tǒng)處各設(shè)有一個精密測力儀器V1、V2、V3和V4,該精密測力儀器的采集信號輸出端均連接至計算機(jī)中。4個精密測力儀器用于被測實體e2發(fā)生位移時,實時測量各點(diǎn)的變化力。由于4個精密測力儀器的測量精度高、量程小,因此,設(shè)計了4個自動配重系統(tǒng)P1、P2、P3和P4進(jìn)行配重,以解決其測量量程問題。裝夾系統(tǒng)包括包容立方體機(jī)構(gòu),采用最小包容原則讓被測實體e2裝夾其中。精密運(yùn)動系統(tǒng)的控制端與計算機(jī)相連,精密運(yùn)動系統(tǒng)的動力輸出端則與裝夾系統(tǒng)相連,通過計算機(jī)指令控制包容有被測實體的裝夾系統(tǒng)實現(xiàn)精密位移。
2 測量方法數(shù)學(xué)模型建立及求解分析
均質(zhì)杠桿U1和U2分別對O1和O2點(diǎn)對稱平衡,為簡化計算,系統(tǒng)受力分析中均不計入。假設(shè)被測實體片層微小單元體為正方體且邊長為ΔS,被測實體在支撐平臺e1上,通過精密位移系統(tǒng)帶動實現(xiàn)每次的微小位移ΔS,從而實現(xiàn)每個測量方向上各個片層按序移過支點(diǎn),達(dá)到測量計算的目的。以支點(diǎn)O1和O2的連線中點(diǎn)O為坐標(biāo)原點(diǎn),將平行于杠桿的方向設(shè)為X軸方向,支點(diǎn)O1和O2的連線設(shè)為Y軸方向,垂直于X軸和Y軸的平面方向設(shè)為Z軸方向,建立空間三維坐標(biāo)系。以計算被測實體在X軸測量方向上進(jìn)行平移時所獲得的片層質(zhì)量和相應(yīng)重心坐標(biāo)為例,進(jìn)行測量裝置各部件受力分析,如圖2所示。已知質(zhì)量為M的被測實體所受的重力為G,將裝夾有被測實體的包容立方體放置于杠桿平衡系統(tǒng)的支撐平臺e1上,并讓包容立方體所測片層方向的起始邊緣與支點(diǎn)O1和O2的連線垂直相對,且將其狀態(tài)設(shè)為被測實體的初始狀態(tài);通過調(diào)節(jié)自動配重系統(tǒng),使杠桿平衡系統(tǒng)處于平衡穩(wěn)定狀態(tài),同時,精密測力儀器測量并記錄下該時刻杠桿平衡系統(tǒng)的4個測力點(diǎn)所受的力FA(0)、FB(0)、FC(0)和FD(0),并將其返回至計算機(jī)中。在初始位置,當(dāng)杠桿U1平衡時(圖2a),分別對支點(diǎn)O1和支點(diǎn)B進(jìn)行受力分析,有
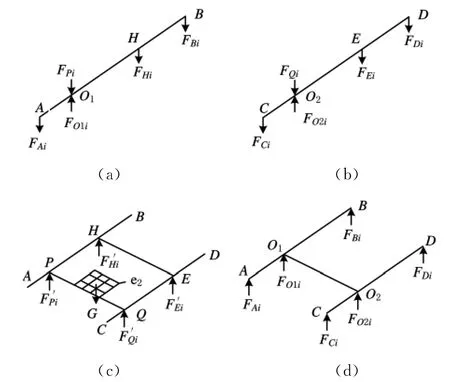
圖2 測量裝置各部件受力分析圖

式 中,LO1A、LO1B、LO1H、LAB、LHB分別為 其下標(biāo)兩點(diǎn) 之間的距離。
在初始位置,當(dāng)杠桿U2平衡時(圖2b),對支點(diǎn)O2和支點(diǎn)D進(jìn)行受力分析,有

式中,LO2C、LO2D、LO2E、LCD、LED分別為 其下標(biāo)兩 點(diǎn) 之間的距離。
系統(tǒng)PQEH平衡時(圖2c),對軸PQ進(jìn)行受力分析,有

式中,X0為被測實體的重心坐標(biāo)值;F′H(0)、F′E(0)分別為FH(0)、FE(0)的反 作 用 力,且 其 各 值 已 知 并 可 測 出;LO1H為其下標(biāo)兩點(diǎn)之間的距離。
系統(tǒng)PQEH平衡時,對軸EH進(jìn)行受力分析,有

式中,F(xiàn)′P(0)、F′Q(0)分別為FP(0)、FQ(0)的反作用力,且其各值已知并可測出。
整個系統(tǒng)平衡時(圖2d),對軸O1O2進(jìn)行受力分析,有

式中,LO1B、LO1A分別為其下標(biāo)兩點(diǎn)之間的距離。
計算機(jī)依據(jù)式(1)~式(7)聯(lián)立求解出被測實體初始狀態(tài)下的重心坐標(biāo)值X0、支點(diǎn)O1和支點(diǎn)O2所受的力FO1(0)和FO2(0),以及固定力接觸點(diǎn)P、Q、H和E所受的力FP(0)、FQ(0)、FH(0)和FE(0)。
保持被裝夾系統(tǒng)的測量方向不變,讓精密運(yùn)動系統(tǒng)在計算機(jī)指令控制下帶動裝夾系統(tǒng)的包容立方體沿其X軸負(fù)方向每次平移ΔS后,通過調(diào)節(jié)自動配重系統(tǒng)使杠桿平衡系統(tǒng)處于平衡穩(wěn)定狀態(tài),此時精密測力儀器測量出被測實體在第i(i=1,2,…,n)層片層位置時杠桿平衡系統(tǒng)的4個測力點(diǎn)所受的力FA(i)、FB(i)、FC(i)和FD(i)。同上所述,杠桿U1平衡時,分別對支點(diǎn)O1和支點(diǎn)B進(jìn)行受力分析;杠桿U2平衡時,分別對支點(diǎn)O2和支點(diǎn)D進(jìn)行受力分析;系統(tǒng)PQEH平衡時,分別對軸PQ和對軸EH進(jìn)行受力分析;整個系統(tǒng)平衡時,由于只有被測實體移動,其系統(tǒng)力矩變化相當(dāng)于由片層質(zhì)量引起,對軸O1O2進(jìn)行受力分析,可列7個方程進(jìn)行求解。計算機(jī)依據(jù)列出的靜力平衡方程組聯(lián)立求解出被測實體平移i次后第i層的片層重力Wi,以及支點(diǎn)O1和支點(diǎn)O2所受的力FO1(i)和FO2(i),固定力接觸點(diǎn)P、Q、H和E所受的力FP(i)、FQ(i)、FH(i)和FE(i)。除去已測部分即未測部分的重心坐標(biāo)Xi的方程為

結(jié)合重力公式Wi=miZg,即可獲得被測實體在X軸測量方向上每片層的質(zhì)量miZ,其中下標(biāo)Z表示總質(zhì)量。依次對被測實體的X軸方向、Y軸方向和Z軸方向,以及3個對角方向進(jìn)行測量,且沿X軸、Y軸和Z軸3個方向測量時,每次平移微小單元體邊長ΔS,從而獲得被測實體在X軸、Y軸和Z軸3個測量方向上的每片層的質(zhì)量和相應(yīng)的重心坐標(biāo)值。測量被測實體時,沿3個對角平面方向進(jìn)行測量,每次平移ΔS時,就能獲得被測實體在3個對角平面測量方向上的每片層的質(zhì)量miZ和相應(yīng)的重心坐標(biāo)值,上述測量一共獲得6個方向上的每片層的質(zhì)量和相應(yīng)的重心坐標(biāo)值。
將包容立方體即被測實體分為n3個正方體的微小單元體,每個實微小單元體的質(zhì)量為m,則第i層的總質(zhì)量為

式中,mij為第i層第j個微小單元體,i=1,2,…,n。
當(dāng)被測實體e2移過第i層時,重心坐標(biāo)方程為

式中,Wi為第i層片層重力;Xi為未測部分的重心坐標(biāo)。
若已知微小單元體的質(zhì)量為m,則由微小單元體定義可知:所有微小單元體在實體空間只有兩種情況存在,要么為實單元體,即質(zhì)量為m;要么為空單元體,即不存在,質(zhì)量為0。其數(shù)學(xué)表達(dá)式為

除可沿X、Y、Z3個方向進(jìn)行測量外,通過改變被測實體的測量方向,還可沿各個對角平面的方向進(jìn)行測量,即共有6個方向可供測量。故每一片層中的微小正方單元體的質(zhì)量和可列一個線性方程,以及一個重心坐標(biāo)計算線性方程。若一個實體共有N個微小正方單元體,當(dāng)其在X、Y、Z3個方向上的每個單元體按坐標(biāo)方向?qū)R時,一個坐標(biāo)方向共可列出2N1/3個線性方程,則在X、Y、Z3個方向上進(jìn)行測量時,共可列出6N1/3個線性方程;當(dāng)沿各個對角平面方向進(jìn)行測量時,共有6個方向,若每個方向只計片層質(zhì)量方程,每片層一個方程,則共有6N1/3個方程;因此,在不同方向測量時,最少可列出12N1/3個線性方程。另外,還存在m1(m1—m)=0,m2(m2—m)=0,…,mN(mN-m)=0等N個非線性方程,經(jīng)過質(zhì)量歸一化處理以后,用這N+12N1/3個方程優(yōu)化求解N個未知數(shù),可高精度地求得每一單元的質(zhì)量,從而獲得實單元質(zhì)量的三維坐標(biāo)值。
3 實驗驗證
根據(jù)測量總體方案進(jìn)行初步實驗,實驗中的精密運(yùn)動系統(tǒng)采用美國BAYSIDE LM系列運(yùn)動平臺,運(yùn)動平臺的重復(fù)定位精度達(dá)±5μm,其作用是控制定位平臺,實現(xiàn)被測實體的精確位移。精密運(yùn)動平臺通過計算機(jī)控制指令控制被測實體按指定距離逐層位移。精密測力儀器采用瑞士梅特勒-托利多AB204-S型分析天平,其可讀性和重復(fù)性均為0.1mg,具有去皮功能。它通過串口與計算機(jī)直接相連,用于測量杠桿平衡系統(tǒng)中力的變化。模擬實驗測量采用圖3所示的標(biāo)準(zhǔn)件模型,初步實驗表明,本文實驗測量片層質(zhì)量的精度達(dá)到0.1mg,經(jīng)智能運(yùn)算測量的微小單元體的精度達(dá)到0.005%,測量重構(gòu)精度達(dá)到±0.2mm,其重構(gòu)點(diǎn)云圖如圖4所示。
圖3 被測標(biāo)準(zhǔn)件模型圖
圖4 轉(zhuǎn)換后的點(diǎn)云圖
4 結(jié)束語
本文測量方法所設(shè)計的測量平臺不僅研制成本低、經(jīng)濟(jì)性好,而且可實現(xiàn)自動測量,其測量方法能夠測量含有任意復(fù)雜內(nèi)外輪廓的實體,且測量速度快、測量數(shù)據(jù)少、分層有序、重構(gòu)簡單;測量數(shù)據(jù)所列數(shù)學(xué)方程均有可靠成熟的解法,編程計算幾乎不會給測量帶來新的誤差,其測量重構(gòu)精度可以控制在0.2mm以內(nèi),基本滿足生產(chǎn)實際中三維實體測量的工程要求。
[1]郭迎福,李兵,李鵬南,等.反求工程中測量技術(shù)綜述[J].礦山機(jī)械,2005,33(7):75-77.
[2]金濤,陳建良,童水光.逆向工程技術(shù)研究進(jìn)展[J].中國機(jī)械工程,2002,13(16):1430-1436.
[3]Gan Yong,Zhong Jing Ru,Gan Du Fen.Research on 3DNon- destructive Measurement System Based on Homogeneous Entity[J].Advanced Materials Research,2011,201/203:63-68.
[4]Gan Yong.Design for 3dEqual-density Entity Contour Digital Measurement Device[C]//Proceedings of the Second International Symposium on Test Automation &Instrumentation.Beijing,2008:2306-2310.
[5]Gan Yong,Sun Ning,Kong Qinghua,et al.Research on Method of 3DContour Digital Measurement for Entity[C]//Proceedings of ICMEM2007 International Conference on Mechanical Engineering and Mechanics.Wuxi,China,2007:395-400.
[6]甘勇,孫寧,孔慶華.面向均質(zhì)實體的產(chǎn)品輪廓反求工程[J].機(jī)械設(shè)計,2008(10):8-11.
猜你喜歡
計算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
中學(xué)生數(shù)理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
計算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
計算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
中學(xué)生數(shù)理化·中考版(2020年10期)2020-11-27 01:59:48
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國生殖健康(2019年2期)2019-08-23 08:12:08
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21