花瓣式可展天線的結構分析
2012-07-25 04:03:56羅阿妮劉賀平張桐鳴
中國機械工程 2012年14期
羅阿妮 劉賀平 李 楊 張桐鳴
哈爾濱工程大學,哈爾濱,150001
0 引言
由于發射航天器的火箭荷載艙的容量有限,因而傳統的固面天線制約了大口徑空間天線的發展。可折疊展開結構的出現拓寬了大口徑空間天線的應用領域,使空間天線得到了前所未有的發展[1-3]。在空間可展結構這一領域,我國與國外還有較大差距,研究大口徑空間可展結構的相關理論和技術,提高衛星的通訊能力和對地觀測能力,已成了當前航天技術研究的一項重要任務[4-5]。本文針對一種仿造花朵形態的空間可展天線,通過分析確定了其結構參數。
1 結構簡述
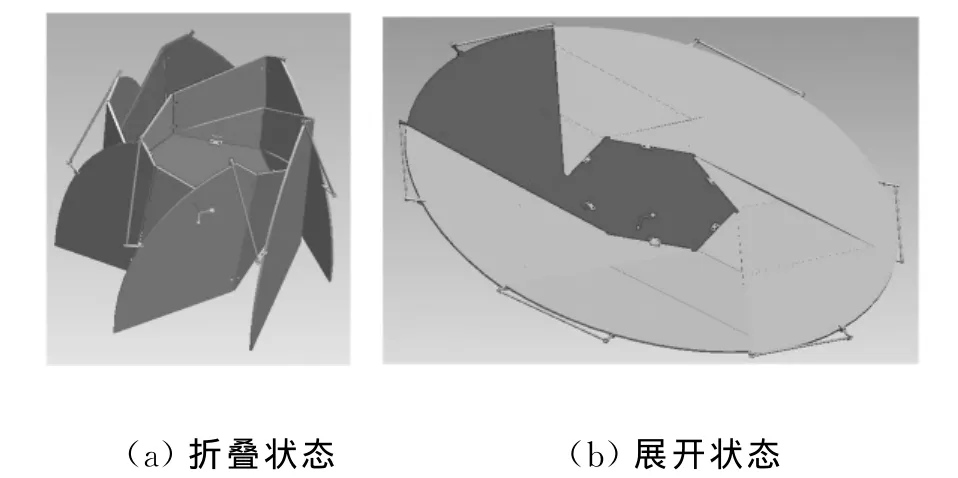
圖1 花瓣式可展天線
圖1所示為花瓣式可展天線的折疊和展開狀態。此可展結構是由1個中心正s邊形和s個花瓣組成。每個花瓣由p塊剛板組成。每個花瓣的根部剛板是1個直角三角形,這樣可以保證花瓣整體能夠翻轉到與中心正多邊形垂直的平面上。每個花瓣的中間p-2塊剛板都為梯形,以便花瓣能夠盤繞到中心正多邊形周圍。花瓣最頂端是一塊不規則形狀的剛板,剛板的一條邊為花瓣式可展天線完全展開后形成的圓的一部分。剛板之間由鉸鏈連接,為了使各花瓣間協調運動和減少驅動構件數,各花瓣由桿構件和運動副連接。
2 連接形式的確定
空間機構的自由度計算公式為

式中,n為機構的構件數;j為移動副的個數;ui為關節i的約束數量[6]。
本文研究的花瓣式可展天線是一個多剛體空間機構,運動復雜。為了減小驅動能量和驅動裝置質量,降低控制難度,必須限制天線的自由度。閉環機構的自由度較開環的少,因此這里采用桿構件把各相鄰花瓣連接形成閉環機構。為了降低運動的復雜性,這里只考慮連接相鄰花瓣的桿構件數為1和2的情況。桿構件之間,以及桿構件與花瓣相連,可以采用轉動副和球副來完成。這里選擇機構自由度為s,根據式(1)計算不同情況下此機構的自由度,結果如表1所示。
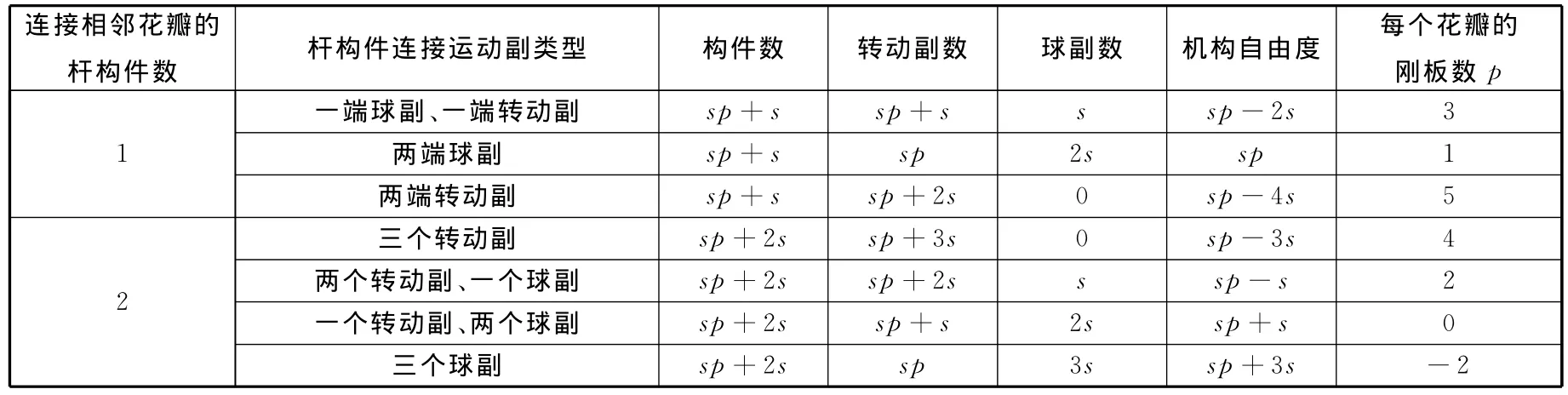
表1 花瓣剛板數的確定
由表1可知:當桿件為單桿,一端球副連接,一端轉動副連接時,剛板數為3;當桿件為單桿,并且兩端轉動副連接時,剛板數為5;當桿件為雙桿,由三個轉動副進行連接時,帆板的剛板數為4。其余類型的連接方式不符合要求。為了保證機構構件數最少,這里選擇每個花瓣的剛板數為3,花瓣間通過一個桿構件、一個轉動副和一個球副連接的結構形式。
3 剛板寬度的確定
花瓣式可展天線的折疊方式為花瓣繞著中心正多邊形旋轉折疊,如圖2所示。由于花瓣式可展天線徑向尺寸比剛板厚度大3個數量級,因此在計算分析時可忽略剛板厚度。如圖3所示,當天線的厚度忽略后,各剛板的寬度L1、L2應等于中間多邊形的邊長(頂部剛板L3除外),這樣此天線才能折疊成如圖2所示的狀態。分析各部分的結構尺寸關系可得,圖2所示折疊狀態的結構參數所需滿足的條件為

式中,H為中間多邊形的邊長;R為花瓣式衛星天線的半徑。
如圖3所示,L1、L2都應該等于中心正多邊形的邊長,而L3的值是可以變化的。根據幾何關系分析,可得
圖2 天線折疊狀態
圖3 花瓣數為6、各花瓣的剛板數為3的花瓣式可展天線

將式(3)代入式(2),整理得

當L3≤L2時,f>1,不滿足式(2)的要求,只有L3>L2時,f≤1,才符合設計要求。
4 花瓣數的確定
圖4 折疊狀態下天線的簡化圖
當天線完全收縮后,圖3所示的AF長度為天線軸向最大高度。通過相應的幾何關系推導,可得

根據上面的分析,對式(2)進行變換,得
這樣可以獲得中間正多邊形的邊長最大值。花瓣式衛星天線折疊后的形狀可近似為圓柱形,底面半徑為圖4所示的AO的長度,高為圖3所示的AF的長度,因此天線折疊后的體積可近似地表示為
通過式(8)可以看出,天線中間多邊形的邊長和中間多邊形的邊數對天線收縮后體積是有影響的。
設天線的半徑R=1m,當每個花瓣剛板數為3時,根據式(7),可以得出天線邊長的最大值,如表2所示。

表2 中間多邊形邊長最大值
當天線花瓣的剛板數一定時,天線收縮后的體積與天線中間多邊形的邊長成反比,即當天線中間多邊形的邊長為最大值時,天線收縮后的體積達到最小。獲得的天線折疊后最小體積的具體數值在表3中列出。

表3 天線收縮后最小體積Vmin
從以上的分析計算結果可知,當剛板數為3,中間多邊形的邊數為5時,天線收縮后體積最小。當連接兩花瓣的桿構件的一端是球副連接,中間多邊形的邊數為5,也就是花瓣數為5時,花瓣與花瓣間的相對轉角過大,球副連接并不能完成過大角度的轉動,因此,根據表3,中間多邊形的邊數,也就是花瓣數,確定為6。
5 結語
花瓣式可展天線是一種多剛體空間機構,構件數目多,運動復雜,因此結構設計具有一定的難度。本文通過對此機構各種情況的自由度分析,確定了各花瓣間的連接方式。利用天線折疊形狀要求,得到了各剛板寬度的關系式,又進一步推出了各板寬間的大小關系。利用天線展開和折疊狀態下各部分結構尺寸的幾何關系,確定了天線折疊狀態的底面半徑和高度,從而獲得了天線折疊后體積表達式。通過對天線折疊后體積表達式的分析,最終確定了天線的花瓣數。這樣的分析使得花瓣式可展天線的設計更加合理。
[1]趙孟良.空間可展結構展開過程動力學理論分析、仿真及實驗[D].杭州:浙江大學,2007.
[2]張逸群,楊東武,杜敬利.周邊桁架可展開天線小沖擊展開過程設計[J].宇航學報,2011,32(5):1205-1210.
[3]侯管仲,肖勇.金屬網反射器索網預應力對模態的影響[J].空間電子技術,2010(4):54-56.
[4]羅阿妮,鄧宗全,劉榮強,等.伸展臂根部鎖定機構的設計與運動分析[J].機械設計,2011,28(1):56-59.
[5]鄧強.錐形可展桁架的設計與分析[D].哈爾濱:哈爾濱工業大學,2010.
[6]楊廷力.機器人機構拓撲結構學[M].北京:機械工業出版社,2004.
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06