仿生越障探測車的研制
2012-07-25 04:02:32劉吉兆劉軒昂陳豐峰劉仁杰
中國機械工程 2012年14期
關(guān)鍵詞:系統(tǒng)
劉吉兆 劉軒昂 陳豐峰 劉仁杰 黃 錦
1.湖南工學(xué)院,衡陽,421002 2.中南大學(xué),長沙,410082
0 引言
近年來,多發(fā)的自然災(zāi)害、人為災(zāi)難嚴重威脅著人類生命財產(chǎn)安全,引起了人們的廣泛關(guān)注。在一些突發(fā)性災(zāi)難現(xiàn)場,如火災(zāi)隨時可能引發(fā)的爆炸、地震后建筑物二次倒塌、有毒物質(zhì)泄露等現(xiàn)場,施救人員無法深入現(xiàn)場探測或救援。人們急于探知災(zāi)難現(xiàn)場的內(nèi)部險情,但又難以接近或進入災(zāi)難現(xiàn)場,此時,搜救車的參與可有效提高搜救效率,減少施救人員傷亡。近10年來,美國、日本等發(fā)達國家在地震、火災(zāi)等救援機器人的研究方面做了大量的工作,研究出各種可用于災(zāi)難現(xiàn)場救援的機器人,如美國iRobot公司生產(chǎn)的Pack-Bot系列機器人[1]、加拿大Inuktun公司研制的Micro VGTV多態(tài)搜救機器人[2],美國卡梅隆大學(xué)研制的安裝在移動平臺上的蛇形機器人,日本大阪大學(xué)研制的蛇形機器人[3],美國加州大學(xué)伯克利分校研制的大小不足3cm的蒼蠅搜救機器人[4]。在國內(nèi),救災(zāi)機器人的研究剛剛起步,但進展很快。中國科學(xué)院沈陽自動化研究所[5]、國防科學(xué)技術(shù)大學(xué)[6]、北京航空航天大學(xué)等單位也都相繼研制出類似的蛇形機器人系統(tǒng)。
目前,國內(nèi)外研制的履帶式搜救機器人雖具有較強的越障能力,但大多數(shù)體積過大、結(jié)構(gòu)復(fù)雜、缺乏對狹小空間進行探測的能力[7];而輪式搜救機器人雖能對狹小空間進行探測,但結(jié)構(gòu)復(fù)雜、不具備越障能力等問題。為此,本文設(shè)計出了一種能模仿蛇形進行球面探測,并具有較強越障能力,能對狹小空間進行探測的仿生越障探測車,該車可應(yīng)用于地震、礦難、火災(zāi)等災(zāi)難搜索救援工作。
1 探測車的組成和工作原理
探測車包括機械部分和電控部分。機械部分由行走越障系統(tǒng)和蛇形探測系統(tǒng)組成,電控部分由供電系統(tǒng)、控制系統(tǒng)和機載遠程通信系統(tǒng)組成。圖1為該探測車的三維仿真圖。
1.1 機械部分
1.1.1 行走越障系統(tǒng)
行走越障系統(tǒng)由車架1、前輪雙曲柄越障機構(gòu)2、左右側(cè)部平行四邊形越障機構(gòu)3和后輪支撐機構(gòu)4組成,如圖1所示。本車設(shè)計為六輪越障,車體前后各安裝一個能轉(zhuǎn)向的驅(qū)動輪,兩側(cè)各有兩個驅(qū)動輪,此設(shè)計可以保證車體在崎嶇不平的路面上運動的平穩(wěn)性。各桿的連接均為鉸接,從而增強探測車的機動性。
(1)車架。車架由高強度、輕量化的纖維樹脂材料制造而成,設(shè)計形狀為類五邊形,可使車體機動靈活越障。
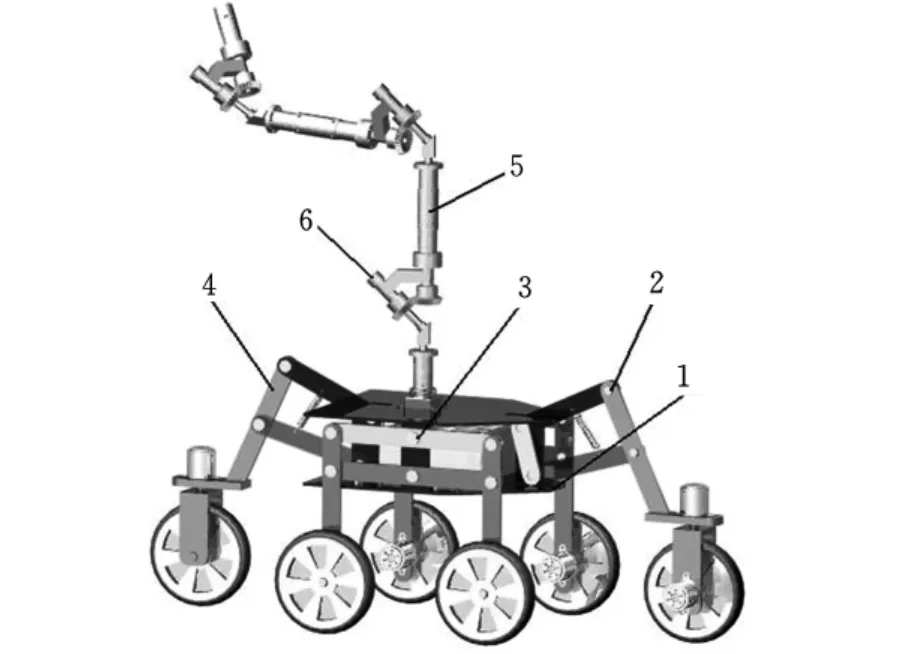
圖1 探測車的三維仿真圖
(2)前輪雙曲柄越障機構(gòu)(圖2)。前輪雙曲柄越障機構(gòu)由平面雙曲柄機構(gòu)、減震彈簧、轉(zhuǎn)向電機及導(dǎo)向前輪組成。當前輪遇到障礙時,其受到的阻力使平面雙曲柄機構(gòu)產(chǎn)生被動形變,從而帶動前輪沿障礙側(cè)壁爬升攀越障礙。彈簧4可隨著伸縮軸的滑動而伸縮起到蓄能減震作用;轉(zhuǎn)向電機6帶動車體前叉轉(zhuǎn)動實現(xiàn)輪胎7轉(zhuǎn)向。
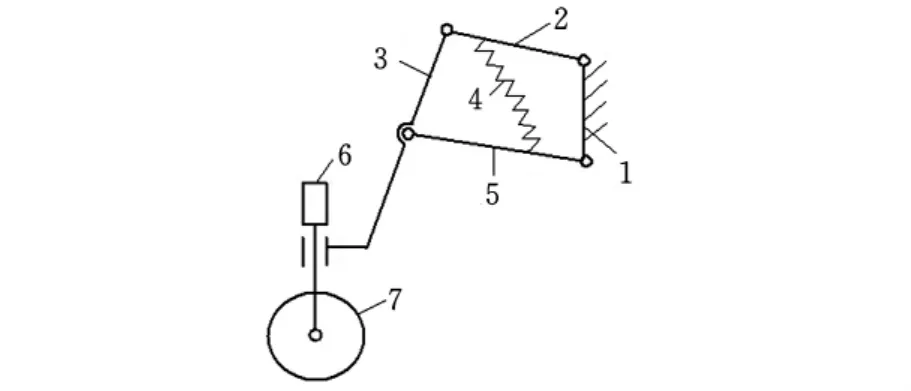
圖2 前輪雙曲柄越障機構(gòu)原理圖
(3)側(cè)部平行四邊形越障機構(gòu)(圖3)。兩側(cè)平行四邊形越障機構(gòu)包括兩個平行四邊形機構(gòu)和前后驅(qū)動輪。當前驅(qū)動輪與障礙物接觸時,平行四邊形連桿機構(gòu)整體產(chǎn)生形變,前輪形成有效被動越障,后輪依然與地面接觸推動車體向前;當前輪越過障礙后即轉(zhuǎn)化成驅(qū)動輪,帶動后輪攀爬障礙。由于平行四邊形連桿機構(gòu)遇障礙偏轉(zhuǎn)產(chǎn)生形變,降低了車體重心、上升高度和傾斜度,從而使得探測車能夠更平穩(wěn)地實現(xiàn)單邊越障。
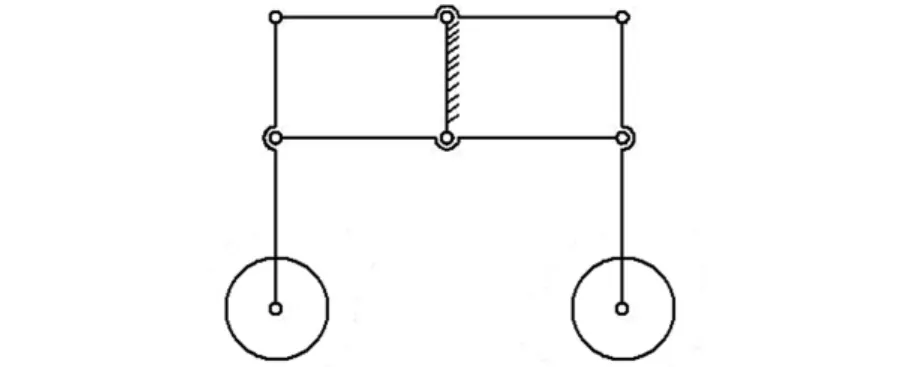
圖3 側(cè)部平行四邊形連桿越障機構(gòu)原理圖
(4)后輪支撐機構(gòu)(圖2中的部件4)。后輪支撐機構(gòu)和前輪雙曲柄越障機構(gòu)的組成相同,這樣能實現(xiàn)前后方向上的越障。當車體前進時后輪起支撐作用,保證車體的平穩(wěn)性。
1.1.2 蛇形探測系統(tǒng)
蛇形探測系統(tǒng)由多組兩自由度角斜機構(gòu)(圖4)和攝像頭(或其他傳感器)組成。兩自由度角斜機構(gòu)由直齒圓錐齒輪3、角斜連桿2、45°角的錐齒輪曲軸4及機架組成。
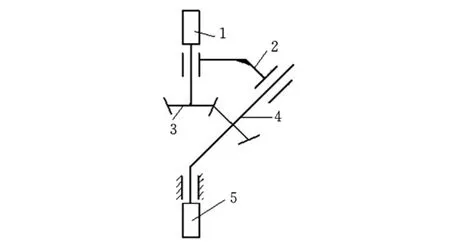
圖4 兩自由度角斜機構(gòu)原理圖
直流伺服電機1帶動直齒圓錐齒輪繞45°角的錐齒輪曲軸公轉(zhuǎn),直流伺服電機2帶動整個角斜機構(gòu)進行自轉(zhuǎn),當這兩個電機同時運行時能達到空間球面轉(zhuǎn)動的效果。在多組角斜機構(gòu)的協(xié)同工作下,使得蛇形探測系統(tǒng)能夠進行空間360°的柔性轉(zhuǎn)動,這樣裝在角斜機構(gòu)的攝像頭就能達到對狹小空間進行探測的目的。
1.2 電控部分
圖5為探測車電控系統(tǒng)原理框圖。整個車載控制系統(tǒng)使用一臺九通道35MHz無線遙控發(fā)射/接收器作為主控制器,運用PWM控制方式,伺服電機外接MOSFET放大電橋作為電機的驅(qū)動部分。蛇形探測系統(tǒng)采用單片機主控,配合預(yù)先設(shè)定好的系統(tǒng)邏輯混控電路,其中兩個通道用于電機位置選擇,由單片機選擇接通對應(yīng)一對電機的通斷,另兩個通道分別控制兩個電機的旋轉(zhuǎn)方向和轉(zhuǎn)速。
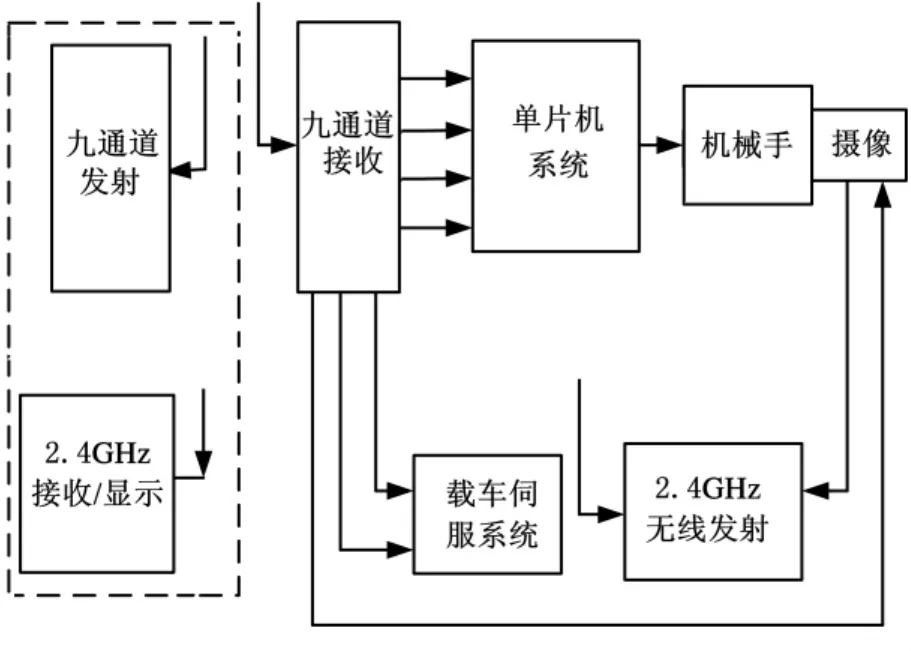
圖5 探測車電控系統(tǒng)原理圖
1.2.1 供電系統(tǒng)
供電系統(tǒng)采用16片相互串聯(lián)的鋰電池,其中12V作為驅(qū)動電源,5V作為控制電源。蓄電池和機載電路板安裝在車架內(nèi)部,蓄電池左側(cè)設(shè)有電源開關(guān)、充電插頭等輔助電氣設(shè)備。
1.2.2 控制系統(tǒng)
遙控發(fā)射/接收采用PCM編碼技術(shù)傳輸控制信號,PCM是以PCM幀的形式發(fā)送控制信號,在發(fā)送之前將脈沖寬度用數(shù)字編碼反映舵機臂的位置,同時加入CRC校驗算法,接收機收到PCM幀,根據(jù)脈沖轉(zhuǎn)換成二進制數(shù)據(jù)流,然后進行CRC校驗。如果受到干擾,則二進制數(shù)據(jù)位會發(fā)生變化,則CRC校驗無法通過,接收機丟棄該幀,等待接收下一個正常的幀。
譯碼電路采用單片機作為主控器,主要由操作面板、復(fù)位電路、時鐘電路以及驅(qū)動陣列等組成。由單片機各口線控制激活相應(yīng)的驅(qū)動器和繼電器。
1.2.3 機載遠程通信系統(tǒng)
機載遠程通信系統(tǒng)由一套視頻傳送系統(tǒng)和遙控系統(tǒng)組成。視頻傳送系統(tǒng)包含了攝像頭、視頻發(fā)射器及視頻接收器、監(jiān)視器等,從攝像頭輸出的圖像為亮度/色度混合的視頻信號,通過模擬無線傳輸?shù)姆绞桨l(fā)送到接收器所處的控制臺。手持遙控器采用PCM編碼FM發(fā)射控制技術(shù),分別設(shè)有行走越障系統(tǒng)和蛇形探測系統(tǒng)的運動控制桿,與車載電子線路的控制信號相匹配。
1.3 建模與仿真
運用UG軟件對探測車進行三維建模及模擬裝配,得到虛擬樣機(圖1)。然后運用Adams軟件對其進行運動仿真,得出各構(gòu)件的空間運動軌跡圖、位移圖(圖6)、受力分析圖(圖7)等。
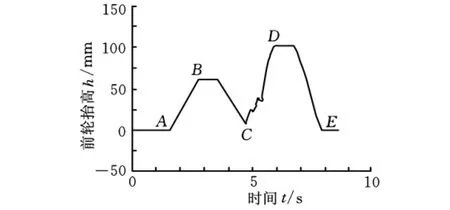
圖6 探測車前輪越障機構(gòu)抬高位移曲線圖
由圖6分析可知:OA段時,探測車在平地行駛;AB段時,雙曲柄機構(gòu)產(chǎn)生形變,前連桿向上抬起帶動前輪攀越斜坡;BC段中,前輪越過斜坡并復(fù)位;CD段中,車體前輪攀越高度為100mm側(cè)面凹凸不平的臺階;DE段中,前輪越過臺階后并復(fù)位。同時,從圖6中可以確定此次探測車前輪的最大越障高度。由圖7所示的彈簧受力曲線表明,減震彈簧在攀越陡坡時受力呈直線上升趨勢,攀爬臺階時呈非線性上升趨勢,受力峰值為420N。
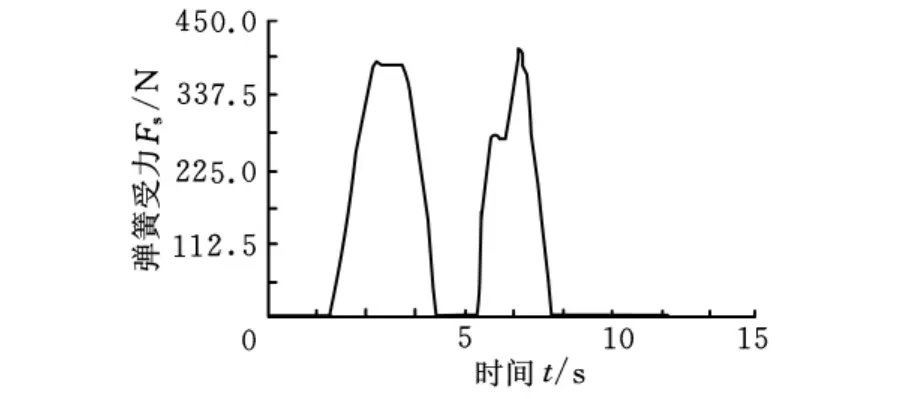
圖7 探測車彈簧受力曲線圖
最后通過對多種路況進行運動仿真,進一步分析、優(yōu)化設(shè)計參數(shù),從而得到最終設(shè)計參數(shù)。
2 樣機制造與調(diào)試
運用UG軟件將虛擬樣機生成零件工程圖及裝配圖,根據(jù)圖紙對探測車的各個零件進行加工,再參照裝配圖,并結(jié)合電控部分對整車進行組裝,實現(xiàn)機電結(jié)合。然后對實物樣機各項性能進行調(diào)試、檢測,最終完成一款各種性能優(yōu)異的新型仿生越障探測車的研制工作。圖8為探測車電控系統(tǒng)實物圖,圖9為仿生越障探測車實物圖。

圖8 探測車電控系統(tǒng)實物圖

圖9 仿生越障探測車實物圖
3 技術(shù)參數(shù)
針對實物樣機,筆者對其進行了全面的測試,得到了越障探測車的基本技術(shù)參數(shù),如表1所示。
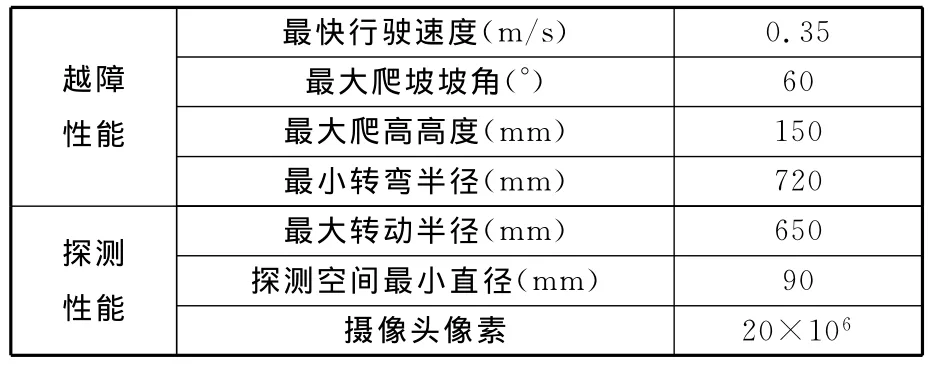
表1 越障探測車基本技術(shù)參數(shù)
4 結(jié)語
通過吸取國內(nèi)外搜救機器人在實際應(yīng)用中的經(jīng)驗教訓(xùn),提出了產(chǎn)品設(shè)計的工作原理和具體方案,并對探測車各項功能進行分析,確定了機械部分和電控部分的設(shè)計思路。應(yīng)用UG、Adams軟件對虛擬樣機三維建模與仿真,優(yōu)化產(chǎn)品的設(shè)計參數(shù)。最后,通過加工、裝配及性能調(diào)試,成功研制出一款新型仿生越障探測車。該探測車具有空間多角度蛇形探測、高機動越障的優(yōu)點,可應(yīng)用于地震、礦難、火災(zāi)等災(zāi)難搜索救援以及排爆、排查有毒物泄漏等工作,基本符合各項搜索救援任務(wù)的要求,適應(yīng)了當今救援機器人的發(fā)展趨勢。
[1]Rothman W.Rescuer by Remote Need Help Send in the Robot[EB/OL].(2001-11-27)[2011-07-28].http://www. time. com/time/2004/innovators/200406/murphy.html.
[2]錢善華,葛世榮,王永勝,等.救災(zāi)機器人的研究現(xiàn)狀與煤礦救災(zāi)的應(yīng)用[J].機器人,2006,28(3):350-354.
[3]佚名.日本研制出新型蛇行救援機器人[EB/OL].(2003-06-24)[2011-07-28].http://www.chinainfo.gov.cn/data/200306/1_20030630_60846.html.
[4]Fearing R S,Chiang K H,Dickinson M H,et al.Wing Transmission for a Micromechanical Flying Insect[C]//Proceedings of the 2000IEEE International Conference on Robotics and Automation.San Francisco:IEEE,2000:1509-1516.
[5]李斌.蛇形機器人的研究及在災(zāi)難救援中的應(yīng)用[J].機器人技術(shù)與應(yīng)用,2003,(3):22-26.
[6]王握文.我國首臺蛇形機器人誕生[EB/OL].(2001-11-27)[2011-07-28].http://www.Pladaily.com.cn/gb/jskj/2001/11/27/20011127001006_gkjqy.html.
[7]Shah B,Choset H.Survey on Urban Search and Rescue Robotics[R].Pittsburgh,PA:CMU,2003.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32